


通用足式機器人公司的LimX Dynamics公司正式發表了他們的首款全自研產品「四輪足機器人W1」。這款產品是基於逐際動力公司的「運動智慧Motion Intelligence」開發的,它搭載了全球頂尖的感知和運動控制演算法,將腿式和輪式結構的優勢融合在一起。同時,它還配備了多款全自研的高性能關節,實現了強大的即時地形感知和全地形移動能力,大大提高了足式機器人的作業能力。透過這款四輪足機器人W1,逐際動力公司瞄準了中國潛力巨大的空白市場,並抓住了先機,為工業巡檢、物流配送、特種作業、科研教育等B端客戶帶來了直擊痛點的應用體驗。逐際動力W1將於今年第四季開始接受預訂

逐際動力發布首款四輪足機器人W1
W1四輪足機器人具備顛覆性的技術與產品能力
針對通用足式機器人,逐際動力全自研高性能關節,讓W1得以把四腳與四輪結合的複合能力發揮到極致,實現了高動態運動與全地形越障能力,比單純的四足機器人更有效率、敏捷,更適用於大部分的落地應用場景。
搭載逐際動力基於感知的運動控制等核心演算法,W1成功攻克了樓梯等難度極高的離散地形,能夠覆蓋絕大多數非輪式的複雜場景,是中國首個基於自主地形感知,透過即時步態規劃與控制,完成上下樓梯的四輪腳產品。
得益於天生的形態優勢和一流的軟硬體能力,W1具備了出色的移動效率、負載能力和續航里程,真正滿足客戶現實的使用要求。

W1是一款具備出色運動能力的四輪腳機器人
目前,逐際動力四輪足機器人W1已成功通過多個複雜應用場景的能力驗證,為落地應用做好充分的準備。
- 高動態運動:全自研高性能關節,釋放出四輪足複雜結構的超級運動能力
- 上下樓梯:融合感知的運動控制,實現了輪足穩定踏步上下樓梯
- 上下斜坡:身體與斜坡面、地面皆可保持水平,按需靈活切換
- 馬路牙子:靈活自由切換運動步態,輕鬆應對各類不同離散地形的挑戰
- 伏地穿越:在高速運動過程中,自由調整身體高度,適應不同作業環境的需求
- 單邊橋:讓機器人適應地形,而不是地形適應機器人,不管地形如何變化,始終做到如履平地
- 草地石板路:通過顛簸路面時,腿部多關節快速協同響應,降低機身姿態波動
- 碎石路:巧妙的輪足結構可踏可滾,兼顧了足式的高通過性和輪式的高效率

W1四輪足機器人在多個複雜應用場景中成功通過能力驗證
四輪足機器人需要具備幾乎與四足機器人相同的能力,但是輪足混合帶來的感知幹擾、狀態估計和運動控制的挑戰卻成倍增加,全球尚無成熟的解決方案,難度極高。為了充分發揮輪足這個複合型態的優勢,必須解決學術界與產業界長期面臨的難題
逐際動力全方位掌握足式機器人運動智慧的核心技術,利用在地形感知、強化學習、多剛體動力學、混雜動力學、模型預測控制等領域的學術和研發經驗,建立領先的感知與控制融合的演算法框架,實現更高穩定性、更強即時性的控制能力。
要實現從樣機到產品的飛躍,做好機器人與環境的實時交互尤為關鍵,逐際動力從創立之初便把感知能力與運動控制的結合作為核心技術進行攻關,並根據軟體演算法定義硬件,全自研高性能關節,讓四輪足機器人優異的物理運動能力得以充分發揮。
逐際動力創辦人張巍博士表示:「通用足式機器人正處於技術爆發期,基礎研究與商業化的交集已經出現,並不斷擴大,我們在恰當的時機,選擇四輪足機器人W1作為首款主打產品,打造具有全地形移動能力的高效通用底盤。這是一款破冰的產品,錨定了接下來技術、應用和市場最佳的交集點,透過一流的技術,讓長期困擾許多足式機器人落地的難題得以解決,讓足式機器人真正走進產業,創造價值。」
以上是「逐際動力」發表首款四輪足機器人,以運動智慧突破足式產品的落地與應用的詳細內容。更多資訊請關注PHP中文網其他相關文章!

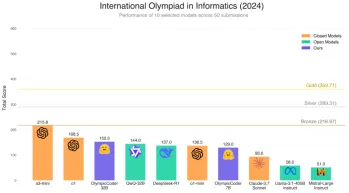 擁抱面部是否7B型號奧林匹克賽車擊敗克勞德3.7?Apr 23, 2025 am 11:49 AM
擁抱面部是否7B型號奧林匹克賽車擊敗克勞德3.7?Apr 23, 2025 am 11:49 AM擁抱Face的OlympicCoder-7B:強大的開源代碼推理模型 開發以代碼為中心的語言模型的競賽正在加劇,擁抱面孔與強大的競爭者一起參加了比賽:OlympicCoder-7B,一種產品
 4個新的雙子座功能您可以錯過Apr 23, 2025 am 11:48 AM
4個新的雙子座功能您可以錯過Apr 23, 2025 am 11:48 AM你們當中有多少人希望AI可以做更多的事情,而不僅僅是回答問題?我知道我有,最近,我對它的變化感到驚訝。 AI聊天機器人不僅要聊天,還關心創建,研究
 Camunda為經紀人AI編排編寫了新的分數Apr 23, 2025 am 11:46 AM
Camunda為經紀人AI編排編寫了新的分數Apr 23, 2025 am 11:46 AM隨著智能AI開始融入企業軟件平台和應用程序的各個層面(我們必須強調的是,既有強大的核心工具,也有一些不太可靠的模擬工具),我們需要一套新的基礎設施能力來管理這些智能體。 總部位於德國柏林的流程編排公司Camunda認為,它可以幫助智能AI發揮其應有的作用,並與新的數字工作場所中的準確業務目標和規則保持一致。該公司目前提供智能編排功能,旨在幫助組織建模、部署和管理AI智能體。 從實際的軟件工程角度來看,這意味著什麼? 確定性與非確定性流程的融合 該公司表示,關鍵在於允許用戶(通常是數據科學家、軟件
 策劃的企業AI體驗是否有價值?Apr 23, 2025 am 11:45 AM
策劃的企業AI體驗是否有價值?Apr 23, 2025 am 11:45 AM參加Google Cloud Next '25,我渴望看到Google如何區分其AI產品。 有關代理空間(此處討論)和客戶體驗套件(此處討論)的最新公告很有希望,強調了商業價值
 如何為抹布找到最佳的多語言嵌入模型?Apr 23, 2025 am 11:44 AM
如何為抹布找到最佳的多語言嵌入模型?Apr 23, 2025 am 11:44 AM為您的檢索增強發電(RAG)系統選擇最佳的多語言嵌入模型 在當今的相互聯繫的世界中,建立有效的多語言AI系統至關重要。 強大的多語言嵌入模型對於RE至關重要
 麝香:奧斯汀的機器人需要每10,000英里進行干預Apr 23, 2025 am 11:42 AM
麝香:奧斯汀的機器人需要每10,000英里進行干預Apr 23, 2025 am 11:42 AM特斯拉的Austin Robotaxi發射:仔細觀察Musk的主張 埃隆·馬斯克(Elon Musk)最近宣布,特斯拉即將在德克薩斯州奧斯汀推出的Robotaxi發射,最初出於安全原因部署了一支小型10-20輛汽車,並有快速擴張的計劃。 h
 AI震驚的樞軸:從工作工具到數字治療師和生活教練Apr 23, 2025 am 11:41 AM
AI震驚的樞軸:從工作工具到數字治療師和生活教練Apr 23, 2025 am 11:41 AM人工智能的應用方式可能出乎意料。最初,我們很多人可能認為它主要用於代勞創意和技術任務,例如編寫代碼和創作內容。 然而,哈佛商業評論最近報導的一項調查表明情況並非如此。大多數用戶尋求人工智能的並非是代勞工作,而是支持、組織,甚至是友誼! 報告稱,人工智能應用案例的首位是治療和陪伴。這表明其全天候可用性以及提供匿名、誠實建議和反饋的能力非常有價值。 另一方面,營銷任務(例如撰寫博客、創建社交媒體帖子或廣告文案)在流行用途列表中的排名要低得多。 這是為什麼呢?讓我們看看研究結果及其對我們人類如何繼續將



熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

Dreamweaver CS6
視覺化網頁開發工具

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)

VSCode Windows 64位元 下載
微軟推出的免費、功能強大的一款IDE編輯器

SublimeText3漢化版
中文版,非常好用

