


最近一段時間,生成式 AI 技術興起,眾多造車新勢力都在探索視覺語言模型與世界模型的新方法,端到端的智慧駕駛新技術似乎成為了共同的研究方向。上個月,理想汽車發布了端到端 + VLM 視覺語言模型 + 世界模型的第三代自動駕駛技術架構。此架構已推送千人內測,將智慧駕駛行為擬人化,並提高了 AI 的資訊處理效率,增強了對複雜路況的理解和應對能力。李想曾在公開的分享中表示,面對大部分演算法難以辨識和處理的罕見駕駛環境,VLM(Visual Language Model)即視覺語言模型可以系統地提升自動駕駛的能力,這種方法從理論上實現了突破。

這套自動駕駛技術架構受諾貝爾獎得主丹尼爾・卡尼曼(Daniel Kahneman)快慢系統理論的啟發,在自動駕駛領域模擬人類的思考和決策過程也需要“快系統”與“慢系統”進行協同。其中:
・ 快系統(系統1)善於處理簡單任務,是人類基於經驗和習慣形成的直覺;在自動駕駛中以端到端大模型構成,包含感知與規劃,足以應對駕駛車輛時95% 的常規場景。
・ 慢系統(系統2)是人類透過更深入的理解與學習形成的邏輯推理、複雜分析和計算能力;在自動駕駛系統中主要是VLM 模型,它在駕駛車輛時用於解決複雜甚至未知的交通場景,佔日常駕駛的約5% 場景。
上週,在理想汽車北京研發總部舉行的活動中,理想汽車智能駕駛副總裁郎咸朋強調,目前理想的智能駕駛已經全面切入端到端+ 大模型方案,這讓車輛已能夠理解複雜路況和交通規則。
「不論端到端還是傳統感知決策模型,都需要大量資料進行訓練。一個潛在問題是,如果遇到沒見過的場景,系統就不能很好的工作,」郎鹹朋表示。 「我們正在探索讓車輛像人一樣思考和決策的能力。」

自去年下半年起,理想開始調整戰略,轉換軌道。今年 2 月,在清華大學交叉資訊研究所、理想汽車提交的 DriveVLM 論文中,研究人員應用最近生成式 AI 領域興起的視覺語言模型(VLM),在視覺理解和推理方面表現出了非凡的能力。
在業界,這是第一個提出自動駕駛快慢系統的工作,其方法充分結合了主流自動駕駛pipeline 和具備邏輯思考的大模型pipeline,並第一個完成了端測部署的大模型工作(基於英偉達Orin 平台)。

DriveVLM 包含一個 Chain-of-Though (CoT) 流程,具有三個關鍵模組:
- 場景描述:用語言描述駕駛環境並識別關鍵對象。
- 場景分析:深入研究關鍵對象的特徵及其對自我車輛的影響。
- 分層規劃:從元動作和決策描述到路徑點逐步製定計劃。
這些模組對應於傳統自動駕駛系統流程中的感知、預測和規劃組件,差異在於它們處理對象感知、意圖級預測和任務級規劃的能力,這些過去是極具挑戰性的。
技術驗證
理想驗證技術在長尾場景有效性:
- 拆解真實環境資料
- 利用產生模型補充新視角
- 自訂實際應用
理想汽車的端到端模型和VLM 模型即時運行:
端到端模型:幀率較高VLM 模型:參數量較大,幀數較低- 在複雜城市在場景中,VLM 在無法決策的情況下發揮作用,向端到端模型傳遞決策結果和軌跡。
端到端方法成為技術分水嶺,標誌著真正使用 AI 的開始。
新一代AI 模型新一代AI 模型可擔任出題人:
篩選出達到專車司機標準用戶的數據作為「真題」結合世界模型生成「模擬題」- 算力挑戰
-
The deployment of models such as VLM on the vehicle side faces computing power challenges:
- Keeping the number of parameters optimal
- Optimizing engineering to improve decision-making latency
Competition Outlook
Tesla FSD is about to enter the domestic smart driving field Entering a new competition stage:
- Ideal car goal: end-to-end + VLM autonomous driving mass production delivery
以上是最晚明年上半年落地L3:理想端對端自動駕駛,性能大幅提升的詳細內容。更多資訊請關注PHP中文網其他相關文章!

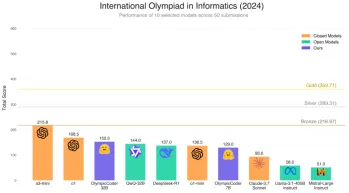 擁抱面部是否7B型號奧林匹克賽車擊敗克勞德3.7?Apr 23, 2025 am 11:49 AM
擁抱面部是否7B型號奧林匹克賽車擊敗克勞德3.7?Apr 23, 2025 am 11:49 AM擁抱Face的OlympicCoder-7B:強大的開源代碼推理模型 開發以代碼為中心的語言模型的競賽正在加劇,擁抱面孔與強大的競爭者一起參加了比賽:OlympicCoder-7B,一種產品
 4個新的雙子座功能您可以錯過Apr 23, 2025 am 11:48 AM
4個新的雙子座功能您可以錯過Apr 23, 2025 am 11:48 AM你們當中有多少人希望AI可以做更多的事情,而不僅僅是回答問題?我知道我有,最近,我對它的變化感到驚訝。 AI聊天機器人不僅要聊天,還關心創建,研究
 Camunda為經紀人AI編排編寫了新的分數Apr 23, 2025 am 11:46 AM
Camunda為經紀人AI編排編寫了新的分數Apr 23, 2025 am 11:46 AM隨著智能AI開始融入企業軟件平台和應用程序的各個層面(我們必須強調的是,既有強大的核心工具,也有一些不太可靠的模擬工具),我們需要一套新的基礎設施能力來管理這些智能體。 總部位於德國柏林的流程編排公司Camunda認為,它可以幫助智能AI發揮其應有的作用,並與新的數字工作場所中的準確業務目標和規則保持一致。該公司目前提供智能編排功能,旨在幫助組織建模、部署和管理AI智能體。 從實際的軟件工程角度來看,這意味著什麼? 確定性與非確定性流程的融合 該公司表示,關鍵在於允許用戶(通常是數據科學家、軟件
 策劃的企業AI體驗是否有價值?Apr 23, 2025 am 11:45 AM
策劃的企業AI體驗是否有價值?Apr 23, 2025 am 11:45 AM參加Google Cloud Next '25,我渴望看到Google如何區分其AI產品。 有關代理空間(此處討論)和客戶體驗套件(此處討論)的最新公告很有希望,強調了商業價值
 如何為抹布找到最佳的多語言嵌入模型?Apr 23, 2025 am 11:44 AM
如何為抹布找到最佳的多語言嵌入模型?Apr 23, 2025 am 11:44 AM為您的檢索增強發電(RAG)系統選擇最佳的多語言嵌入模型 在當今的相互聯繫的世界中,建立有效的多語言AI系統至關重要。 強大的多語言嵌入模型對於RE至關重要
 麝香:奧斯汀的機器人需要每10,000英里進行干預Apr 23, 2025 am 11:42 AM
麝香:奧斯汀的機器人需要每10,000英里進行干預Apr 23, 2025 am 11:42 AM特斯拉的Austin Robotaxi發射:仔細觀察Musk的主張 埃隆·馬斯克(Elon Musk)最近宣布,特斯拉即將在德克薩斯州奧斯汀推出的Robotaxi發射,最初出於安全原因部署了一支小型10-20輛汽車,並有快速擴張的計劃。 h
 AI震驚的樞軸:從工作工具到數字治療師和生活教練Apr 23, 2025 am 11:41 AM
AI震驚的樞軸:從工作工具到數字治療師和生活教練Apr 23, 2025 am 11:41 AM人工智能的應用方式可能出乎意料。最初,我們很多人可能認為它主要用於代勞創意和技術任務,例如編寫代碼和創作內容。 然而,哈佛商業評論最近報導的一項調查表明情況並非如此。大多數用戶尋求人工智能的並非是代勞工作,而是支持、組織,甚至是友誼! 報告稱,人工智能應用案例的首位是治療和陪伴。這表明其全天候可用性以及提供匿名、誠實建議和反饋的能力非常有價值。 另一方面,營銷任務(例如撰寫博客、創建社交媒體帖子或廣告文案)在流行用途列表中的排名要低得多。 這是為什麼呢?讓我們看看研究結果及其對我們人類如何繼續將



熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

PhpStorm Mac 版本
最新(2018.2.1 )專業的PHP整合開發工具

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)

MinGW - Minimalist GNU for Windows
這個專案正在遷移到osdn.net/projects/mingw的過程中,你可以繼續在那裡關注我們。 MinGW:GNU編譯器集合(GCC)的本機Windows移植版本,可自由分發的導入函式庫和用於建置本機Windows應用程式的頭檔;包括對MSVC執行時間的擴展,以支援C99功能。 MinGW的所有軟體都可以在64位元Windows平台上運作。

WebStorm Mac版
好用的JavaScript開發工具

