
Maison >Périphériques technologiques >IA >Un peu sur la mise en œuvre des lignes de voies BEV
Un peu sur la mise en œuvre des lignes de voies BEV

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2024-03-06 11:31:131199parcourir
Une graine a été plantée en 2021
Les étudiants qui ont lu l'histoire des obstacles BEV doivent savoir que notre groupe a commencé à fabriquer des obstacles BEV vers le 21 octobre. A cette époque, je n’osais pas penser à faire le marquage des voies BEV car il n’y avait pas de main d’œuvre. Mais je me souviens que vers décembre, nous avons rencontré un candidat lors de l'entretien, nous avons entendu dire qu'il travaillait sur le marquage des voies BEV depuis plus de six mois. L'ensemble du parcours technique était utilisé comme réseau de marquage des voies BEV à travers les hauteurs. cartes de précision. Entraînez la vraie valeur et dites que l'effet n'est pas mauvais. Malheureusement, ce candidat n’est finalement pas venu vers nous. Combiné avec le contenu du marquage des voies enseigné lors de la journée Telsa AI en 2021, la graine du marquage des voies BEV a été plantée dans le groupe.
Faites le premier pas dans le bon sens en 22 ans
Pendant 22 ans, l'effectif de notre équipe était très serré. Je me souviens qu'en juin et juillet, nous avions juste l'effectif pour explorer les lignes de voies BEV. Mais à cette époque, il n’y avait qu’un seul camarade de classe dans notre groupe (appelons-le Xiaoxuan pour l’instant) qui avait 2 mois pour faire ça. Ensuite, la graine de 2021 a commencé à germer. Nous allions commencer avec les données. L'étudiant Xiaoxuan était toujours très bon (très imaginatif, et il a également fait plus de choses qui ont surpris tout le monde à l'avenir). nous pouvons extraire des données sur les lignes de voie autour de la voiture correspondante grâce à des cartes à grande vitesse et de haute précision. Quand il a été réalisé, je me souviens que tout le monde était encore très excité.
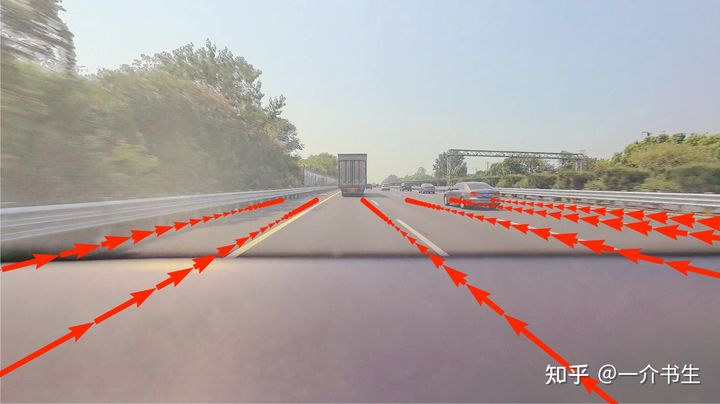
Figure 1 : L'effet des lignes de voies de carte de haute précision projetées sur le système d'image
Comme vous pouvez le voir sur la figure 1, il y a encore quelques problèmes avec la paire d'ajustement, donc Xiaoxuan a effectué une série d'optimisations. Deux mois plus tard, Xiaoxuan est allé accomplir d'autres tâches. Avec le recul, nous avons fait le bon pas en explorant les lignes de voies BEV. Parce qu'en 2021 et 22, de nombreux excellents documents et codes de la ligne BEV ont été progressivement open source. En voyant cela, vous pensez peut-être qu’il doit y avoir une histoire parfaite sur la mise en œuvre des lignes de voies BEV en 2023. Cependant, les idéaux sont souvent très épanouissants, mais la réalité est très cruelle.
23 ans d'achoppement
Parce que nos obstacles BEV ont prouvé que le BEV peut emprunter cette voie, et il a également montré de bons résultats aux tests routiers. Le groupe a commencé à disposer de plus de ressources pour considérer les lignes de voies. Notez qu'il ne s'agit pas de BEV. pourquoi ? Parce qu'à cette époque, nous étions confrontés à beaucoup de pression pour passer en ligne et nous n'avions pas suffisamment d'expérience dans les lignes à voies BEV. En d'autres termes, il n'y avait presque personne dans l'ensemble du groupe qui avait réalisé une production en série de lignes à voies 2D. . Au premier semestre 2023, cela peut vraiment être qualifié de trébuchement. Nous avons eu de nombreuses discussions animées en interne, et avons finalement décidé de former deux lignes, dont l'une est la ligne de voie 2D : la plupart des effectifs sont sur la ligne de voie 2D, et l'accent est mis sur la ligne de voie 2D, le modèle léger de post-traitement, à travers des lignes de voie 2D pour accumuler une expérience de production de masse après le traitement de la ligne de voie. Une ligne est la ligne de voies BEV : il n'y a qu'un petit nombre de main-d'œuvre (en fait seulement 1 à 2 personnes), se concentrant sur la conception du modèle de la ligne de voies BEV et accumulant une expérience de modèle. Il existe déjà de nombreux réseaux de marquage des voies BEV. Je publierai ici deux articles qui ont un plus grand impact sur nous pour votre référence. "HDMapNet : un cadre de construction et d'évaluation de cartes HD en ligne" et "MapTR : modélisation et apprentissage structurés pour la construction de cartes HD vectorisées en ligne"
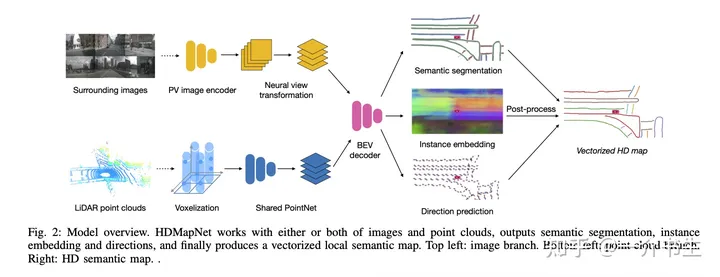
Figure 2 : HDMapNet

Figure 3 MapTR
Heureusement, en In En avril et mai, nous avons accumulé beaucoup d'expérience dans la production en série de post-traitement de lignes de voies en 2D, et notre réseau de lignes de voies BEV a également été conçu. Fin mai, les lignes de voies BEV ont été rapidement mises en service en douceur. . Je dois dire ici que notre camarade de classe Dahai, responsable du post-traitement des lignes de voie, est toujours très compétent. Cependant, au moment où l’on pense que tout va bien, le cauchemar est souvent sur le point de commencer. Après le déploiement des lignes de voies BEV, l'effet de contrôle des véhicules n'était pas idéal. À ce moment-là, tout le monde est tombé dans une phase de doute. Est-ce à cause du problème d'ajustement des cannelures cubiques des lignes de voies BEV ou du problème d'une mauvaise adaptation. des paramètres en aval. Heureusement, nous avons les résultats du fournisseur sur notre voiture. Nous avons enregistré les résultats des lignes de voie du fournisseur lors de l'essai routier, puis les avons comparés avec nos résultats dans l'outil de visualisation. Lorsque l'effet de contrôle des véhicules n'est pas bon, nous devons d'abord prouver qu'il n'y a aucun problème avec la qualité de nos propres lignes de voies, afin que les conducteurs en aval puissent s'adapter à nos lignes de voies BEV. Il nous a fallu un mois, un mois entier, pour avoir un contrôle stable de la voiture. Je me souviens très bien que nous avons également couru de Shanghai à Suzhou. C'était encore un samedi. Tout le monde dans le groupe était très excité de voir l'effet de contrôle de la voiture à grande vitesse.
Cependant, une histoire comporte souvent des rebondissements. Nous ne pouvons utiliser que des cartes à grande vitesse et de haute précision pour produire des données sur les lignes de voie. Que faire de la ville ? Il reste encore tant de cas graves à résoudre. À ce moment-là, la personne importante apparaîtra enfin. Appelons-le camarade de classe Xiaotang (le grand intendant de notre groupe de données). Xiaotang et les autres ont utilisé la reconstruction de nuages de points pour reconstruire le clip pour nous (Ce processus était assez douloureux. Je me souviens que ces deux mois ont été la période la plus stressante pour eux, haha. Bien sûr, Xiaotang et moi sommes souvent tombés amoureux et nous nous sommes tués Après tout, je dis souvent qu'il n'y a plus de données lors des réunions ). Alors, comment étiqueter après la reconstruction ? En regardant les fournisseurs de l'époque, aucun d'entre eux ne disposait de tels outils d'étiquetage, encore moins d'expérience en matière d'étiquetage. Avec Xiaotang et d'autres, après un long mois, l'outil d'annotation a finalement été peaufiné avec le fournisseur. (Nous plaisantons souvent en disant que nous donnons du pouvoir à l'ensemble du secteur de l'annotation autonome. Ce processus est vraiment pénible et la reconstruction des clips est très lente à charger). Cependant, l'ensemble de l'étiquetage est encore relativement lent ou coûteux. À cette époque, Xiaoxuan a fait ses débuts avec son grand modèle de pré-étiquetage de lignes de voie (l'effet du grand modèle de pré-étiquetage de lignes de voie est toujours exceptionnel), et tout le monde. Le regarda avec étonnement. Après cet ensemble de combinaisons, notre production de données de lignes de voies est enfin presque prête. En août, notre ligne de voie de contrôle de ligne BEV a été bien itérée, ce qui convient aux fonctions de pilotage simples à grande vitesse. Maintenant, Xiaoxuan nous apporte encore plus de surprises dans la direction pré-marquée du grand modèle. Nous et Xiaotang sommes toujours amoureux l'un de l'autre.
Cependant, aucune histoire ne se termine aussi facilement. En septembre, nous avons commencé à travailler sur des modèles de pré-fusion multimodaux (Lidar, caméra, Radar) et multitâches (lignes de voies, obstacles, Occ), et prendrons par la suite en charge la navigation des villes. Power (NCP) est la soi-disant solution qui met l'accent sur la perception et ignore les cartes. Forts de l'expérience des obstacles BEV et des lignes de voies BEV, nous déploierons prochainement le réseau convergé sur les véhicules, probablement d'ici fin septembre. De nombreuses sous-tâches ont également été ajoutées aux lignes de voie, telles que la reconnaissance des panneaux routiers, la topologie des intersections, etc. Dans ce processus, nous avons amélioré le post-traitement des lignes de voie BEV, abandonné l'ajustement de spline cubique de ligne de voie et adopté un schéma de suivi de points. La sortie du schéma de suivi de points et notre modèle de ligne de voie peuvent être facilement une bonne combinaison. Ce processus était également douloureux. Nous avons tenu des réunions spéciales une fois par semaine pendant deux mois consécutifs. Après tout, nous avions bien fait sur la base du plan approprié, mais pour atteindre une limite plus élevée, nous ne pouvions que souffrir et être heureux. Enfin, nous avons déjà testé les fonctions de base sur route.
Laissez-moi vous expliquer brièvement la figure 4. Le côté gauche est l'effet du suivi des points de ligne de voie. Actuellement, la portée de perception de notre modèle n'est que des 80 premiers mètres. Vous pouvez voir qu'il y a certains points derrière la voiture. qui sont laissés par le suivi. À droite se trouve la carte perceptuelle en temps réel que nous avons établie. Bien sûr, elle est encore dans un processus d'itération rapide et de nombreux problèmes restent à résoudre.
24 est le nouveau départ
Debout dans 24 ans, je repense à notre croissance et à notre accumulation de 21 à maintenant. Je suis très chanceuse qu'à ce moment-là, en 21, j'aie eu l'opportunité de faire du BEV. J'ai également beaucoup de chance d'avoir un groupe d'amis partageant les mêmes idées qui se complètent tout au long du chemin. Dans 24 ans, nous avons beaucoup de choses à poursuivre, notamment la production en série de modèles de pré-fusion, les efforts d'orientation des données, l'exploration des modèles temporels, l'imagination de bout en bout, etc.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Résumé des ressources d'ensembles de données open source pour la conduite autonome
- Vous pouvez douter de la sécurité de la conduite autonome, mais le big data vous le dit : elle conduit mieux que vous
- Comment utiliser le langage Go pour le développement de la conduite autonome ?
- Nouvelle solution BEV LV Fusion : Lift-Attend-Splat au-delà de BEVFusion