

Swift drone uses AI technology to defeat top human players in FPV event

Artificial intelligence has once again defeated the human world champion, this time in drone racing.
This major result was published in the magazines "Nature" and "Science Robotics" by a team of engineers from the University of Zurich in Switzerland. After the first race against an AI drone in 2011, no autonomous drone could beat a human pilot until Swift came along. Swift defeated world champion human players, including 2019 Drone Racing League World Champion Alex Vanover, two-time MultiGP International Open Champion Thomas Bitmatta, and three-time Swiss National Champion Marvin Schaepper
In the virtual realm, artificial intelligence has defeated humans in games such as chess, checkers, Go and StarCraft. Now, for the first time, it has also successfully defeated humans in a physical challenge

This paragraph has been rewritten as follows: The game was conducted by a "First Person View" (FPV) drone equipped with a high-resolution camera. An article was published in Science Robotics magazine detailing the historic victory achieved by the Swift drone development team. In the fierce competition with three drone competitors, this drone won 15 out of 25 challenges. The person in charge of the project said, "Our results mark the first time that an AI-driven robot has defeated humans in a real-life experience event designed for humans and led by humans."

The secret to the success of the "Swift" drone lies in its powerful artificial neural network, which can optimize the drone's route and speed. It collects environmental details in real time through onboard cameras to provide precise guidance for drones, while human pilots rely on video signals transmitted to headphones to experience a "first-person perspective."
In this drone race, the human operator controls the drone through the 3D track through the onboard camera. The innovation of the Swift system is the ability to map the drone's status to commands to adjust thrust and spin rate. This achievement is a milestone in the field of mobile robotics and machine intelligence.


Swift technology introduction
Swift is a quadcopter that is autonomously controlled using only onboard sensors and computing. The aircraft consists of two key modules:
- Perception system converts high-dimensional visual and inertial information into low-dimensional representation;
- Control strategy, ingests the low-dimensional representation generated by the perception system and generates control commands.
Among them, the control strategy is represented by a feedforward neural network and trained using model-free on-policy deep reinforcement learning (RL)
Given the differences in sensing and dynamics between simulation and the real world, optimizing strategies only in simulation will result in poorer actual performance of the drone. Therefore, the research team decided to use data collected from physical systems to estimate a non-parametric empirical noise model
Research results show that these empirical noise models play a positive role in successfully transferring control strategies from simulation to reality
Specifically, Swift converts sensor readings on the aircraft into control commands. This conversion process includes two parts:
(1) Observation strategy to refine high-dimensional visual and inertial information into task-specific low-dimensional encoding;
(2) Control strategy, convert encoding into drone commands.
Of the 10 losses recorded by Swift, 40% were due to collisions with opponents, 40% were due to collisions with competition gates, and 20% were due to being slower than human-controlled drones. Overall, Swift won the most races against human-controlled drones, and it also set the fastest race record, beating the best time of a human-controlled drone (A. Vanover) by half a dozen Second.
While the Swift was faster than all human-controlled drones overall, it wasn't faster on every segment of the track.
Careful analysis by the research team found that: when taking off, Swift has a shorter reaction time and takes off 120 milliseconds earlier than human pilots on average; Swift also accelerates faster and enters the first competition gate at a higher speed. In tight turns, the Swift's movements are tighter.
The research team also proposed a hypothesis that Swift optimizes trajectories on a longer time scale than human operators. It is known that model-free reinforcement learning can be achieved by optimizing long-term rewards. In contrast, human operators have a shorter time scale for planning movements and can only predict one competition gate in the future at most
The above is the detailed content of Swift drone uses AI technology to defeat top human players in FPV event. For more information, please follow other related articles on the PHP Chinese website!

 Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AM
Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AMLangChain is a powerful toolkit for building sophisticated AI applications. Its agent architecture is particularly noteworthy, allowing developers to create intelligent systems capable of independent reasoning, decision-making, and action. This expl
 What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AM
What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AMRadial Basis Function Neural Networks (RBFNNs): A Comprehensive Guide Radial Basis Function Neural Networks (RBFNNs) are a powerful type of neural network architecture that leverages radial basis functions for activation. Their unique structure make
 The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AM
The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AMBrain-computer interfaces (BCIs) directly link the brain to external devices, translating brain impulses into actions without physical movement. This technology utilizes implanted sensors to capture brain signals, converting them into digital comman
 Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AM
Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AMThis "Leading with Data" episode features Ines Montani, co-founder and CEO of Explosion AI, and co-developer of spaCy and Prodigy. Ines offers expert insights into the evolution of these tools, Explosion's unique business model, and the tr
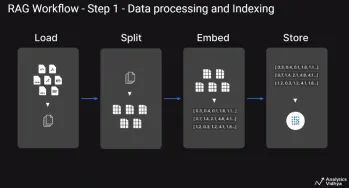 A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AM
A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AMThis article explores Retrieval Augmented Generation (RAG) systems and how AI agents can enhance their capabilities. Traditional RAG systems, while useful for leveraging custom enterprise data, suffer from limitations such as a lack of real-time dat
 What are Integrity Constraints in SQL? - Analytics VidhyaApr 21, 2025 am 10:58 AM
What are Integrity Constraints in SQL? - Analytics VidhyaApr 21, 2025 am 10:58 AMSQL Integrity Constraints: Ensuring Database Accuracy and Consistency Imagine you're a city planner, responsible for ensuring every building adheres to regulations. In the world of databases, these regulations are known as integrity constraints. Jus
 Top 30 PySpark Interview Questions and Answers (2025)Apr 21, 2025 am 10:51 AM
Top 30 PySpark Interview Questions and Answers (2025)Apr 21, 2025 am 10:51 AMPySpark, the Python API for Apache Spark, empowers Python developers to harness Spark's distributed processing power for big data tasks. It leverages Spark's core strengths, including in-memory computation and machine learning capabilities, offering
 Self-Consistency in Prompt EngineeringApr 21, 2025 am 10:50 AM
Self-Consistency in Prompt EngineeringApr 21, 2025 am 10:50 AMHarnessing the Power of Self-Consistency in Prompt Engineering: A Comprehensive Guide Have you ever wondered how to effectively communicate with today's advanced AI models? As Large Language Models (LLMs) like Claude, GPT-3, and GPT-4 become increas


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

SublimeText3 English version
Recommended: Win version, supports code prompts!

SublimeText3 Chinese version
Chinese version, very easy to use

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

