

 Technology peripheralsAIAre you serious? Let the robot dog be the goalkeeper and publish a paper
Technology peripheralsAIAre you serious? Let the robot dog be the goalkeeper and publish a paperAre you serious? Let the robot dog be the goalkeeper and publish a paper

Is it reliable to let a robot dog serve as a football goalkeeper? Whether it is reliable or not, let’s see the effect first and then draw a conclusion.
The staff made a very mild attack, and the robot dog blocked the ball:

More difficult, It’s no problem to score a parabolic goal:

Is it suspected of cheating to throw the ball by hand? Try it with your feet, and the robot dog can also defend the goal.

Interestingly, the study also tried to use a robot dog to Play football, and the other one will be the goalkeeper. It’s great that the two robot dogs can play by themselves:

After seeing the effect, I feel like the robot dog is the goalkeeper. Pretty reliable. This robot dog is Mini Cheetah, which was developed by MIT in 2019. Now researchers from the University of California, Berkeley and other institutions have deployed a new reinforcement learning framework for Mini Cheetah, allowing it to complete football goalkeeping tasks with a goalkeeping success rate of 87.5%. .
Paper address: https://arxiv.org/pdf/2210.04435.pdf
Kick the ball 4 meters away
Mini Cheetah successfully kept goal in less than 1 second
It is still difficult for Mini Cheetah to learn to keep goal, because it involves the height and dynamics of the object (such as the ball) being thrown Moving position, specifically, one side manipulates a fast-moving ball whose direction and position are uncertain, while the other side needs to quickly judge the ball's position to prevent a goal. Accomplishing this requires teaching the robot to dynamically move its body while ensuring that its feet (or face) get to where they need to be to block the ball in time, which is basically two puzzles rolled into one.
The solution of this research is to combine the motion controller with the end effector trajectory planning, so that the best way can be found to make Mini Cheetah before the ball reaches the target. Within one second, block.
To complete the above process, Mini Cheetah also needs to be trained to master a set of useful goalkeeping skills. For example, Mini Cheetah needs to master sideways interception of the ball near and near the ground, and master diving. Technique to reach the lower corner of the goal, jump to the top and upper corner of the goal. After completing these actions, Mini Cheetah can recover and finally land safely. Reference movements for each skill are manually programmed, trained in simulation, and then transferred directly to the robot.
The goal defended by Mini Cheetah is 1.5m wide and 0.9m high, the ball (number 3) is kicked from about 4m away, the ball is tracked externally and then Mini Cheetah blocks it. The performance of such a small robot dog to complete the ball-blocking action is impressive.

The research shows that the robot dog system can transfer the dynamic movements and goalkeeping skills learned in simulation to a real quadruped. On the robot, the goalkeeping success rate against random shots in the real world was 87.5%. The average success rate for human soccer goalkeepers is 69%. The researchers say their proposed framework can be extended to other scenarios, such as multi-skill football.
Let’s take a look at the framework behind this robot dog.
Hierarchical Reinforcement Learning Framework
First of all, making a four-legged robot a football goalkeeper is a very challenging problem, because it must simultaneously solve the problem of predicting the trajectory of an object and capturing non-grabbing objects. Two practical problems with holding objects (spheres). The robot needs to react to and intercept a ball flying in the air within a very short period of time (usually less than a second).
To accomplish this challenge, the research team proposed a hierarchical model-free reinforcement learning (RL) framework. The framework contains a multiple control strategy for different motor skills, covering different areas of the target.

These control strategies allow the robot to track the trajectories of randomly parameterized end effectors while performing specific motor skills such as jumping to block the ball, diving The ball and the ball are stopped rolling on the ground.

#The RL framework contains a high-level planner that helps the robot determine the required locomotor skills and plan the end-effector trajectory to intercept the fly direction Balls in different target areas.
This research deployed the above RL framework on the Mini Cheetah quadruped robot proposed by MIT in 2019. Experiments show that this RL framework can allow the quadruped robot to effectively intercept fast movements in the real world. ball.

Previous research on the RL framework of quadruped robots mainly focused on low-level motion control, such as making the robot walk at a required speed and imitating reference motion. The framework proposed in this study extends the learned motor skills to higher-level tasks, successfully using advanced planning to allow a quadruped robot to accurately intercept a fast-moving football with agile movements. This has important implications for advanced planning control of quadruped robots.
The above is the detailed content of Are you serious? Let the robot dog be the goalkeeper and publish a paper. For more information, please follow other related articles on the PHP Chinese website!

 7 Powerful AI Prompts Every Project Manager Needs To Master NowMay 08, 2025 am 11:39 AM
7 Powerful AI Prompts Every Project Manager Needs To Master NowMay 08, 2025 am 11:39 AMGenerative AI, exemplified by chatbots like ChatGPT, offers project managers powerful tools to streamline workflows and ensure projects stay on schedule and within budget. However, effective use hinges on crafting the right prompts. Precise, detail
 Defining The Ill-Defined Meaning Of Elusive AGI Via The Helpful Assistance Of AI ItselfMay 08, 2025 am 11:37 AM
Defining The Ill-Defined Meaning Of Elusive AGI Via The Helpful Assistance Of AI ItselfMay 08, 2025 am 11:37 AMThe challenge of defining Artificial General Intelligence (AGI) is significant. Claims of AGI progress often lack a clear benchmark, with definitions tailored to fit pre-determined research directions. This article explores a novel approach to defin
 IBM Think 2025 Showcases Watsonx.data's Role In Generative AIMay 08, 2025 am 11:32 AM
IBM Think 2025 Showcases Watsonx.data's Role In Generative AIMay 08, 2025 am 11:32 AMIBM Watsonx.data: Streamlining the Enterprise AI Data Stack IBM positions watsonx.data as a pivotal platform for enterprises aiming to accelerate the delivery of precise and scalable generative AI solutions. This is achieved by simplifying the compl
 The Rise of the Humanoid Robotic Machines Is Nearing.May 08, 2025 am 11:29 AM
The Rise of the Humanoid Robotic Machines Is Nearing.May 08, 2025 am 11:29 AMThe rapid advancements in robotics, fueled by breakthroughs in AI and materials science, are poised to usher in a new era of humanoid robots. For years, industrial automation has been the primary focus, but the capabilities of robots are rapidly exp
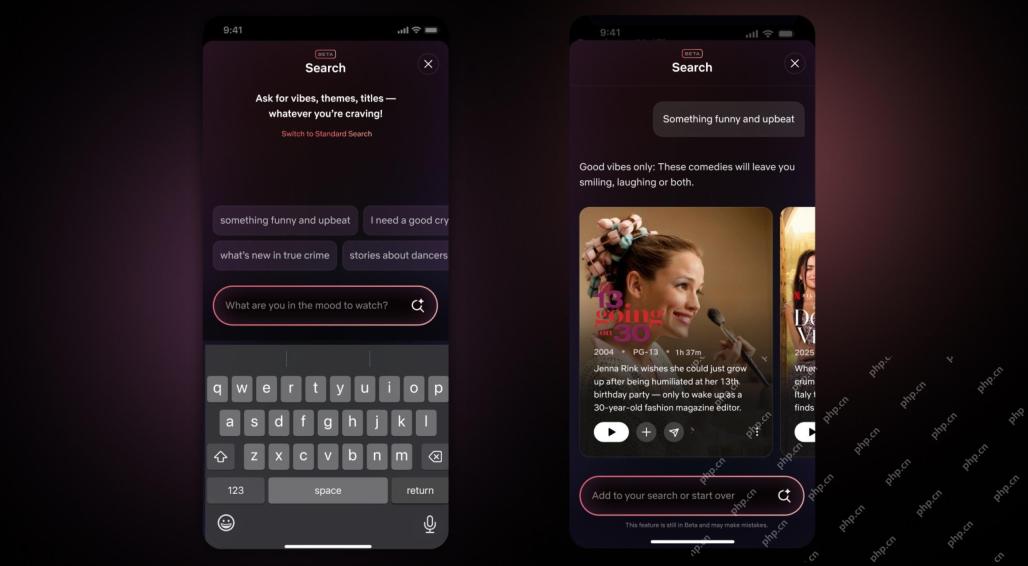 Netflix Revamps Interface — Debuting AI Search Tools And TikTok-Like DesignMay 08, 2025 am 11:25 AM
Netflix Revamps Interface — Debuting AI Search Tools And TikTok-Like DesignMay 08, 2025 am 11:25 AMThe biggest update of Netflix interface in a decade: smarter, more personalized, embracing diverse content Netflix announced its largest revamp of its user interface in a decade, not only a new look, but also adds more information about each show, and introduces smarter AI search tools that can understand vague concepts such as "ambient" and more flexible structures to better demonstrate the company's interest in emerging video games, live events, sports events and other new types of content. To keep up with the trend, the new vertical video component on mobile will make it easier for fans to scroll through trailers and clips, watch the full show or share content with others. This reminds you of the infinite scrolling and very successful short video website Ti
 Long Before AGI: Three AI Milestones That Will Challenge YouMay 08, 2025 am 11:24 AM
Long Before AGI: Three AI Milestones That Will Challenge YouMay 08, 2025 am 11:24 AMThe growing discussion of general intelligence (AGI) in artificial intelligence has prompted many to think about what happens when artificial intelligence surpasses human intelligence. Whether this moment is close or far away depends on who you ask, but I don’t think it’s the most important milestone we should focus on. Which earlier AI milestones will affect everyone? What milestones have been achieved? Here are three things I think have happened. Artificial intelligence surpasses human weaknesses In the 2022 movie "Social Dilemma", Tristan Harris of the Center for Humane Technology pointed out that artificial intelligence has surpassed human weaknesses. What does this mean? This means that artificial intelligence has been able to use humans
 Venkat Achanta On TransUnion's Platform Transformation And AI AmbitionMay 08, 2025 am 11:23 AM
Venkat Achanta On TransUnion's Platform Transformation And AI AmbitionMay 08, 2025 am 11:23 AMTransUnion's CTO, Ranganath Achanta, spearheaded a significant technological transformation since joining the company following its Neustar acquisition in late 2021. His leadership of over 7,000 associates across various departments has focused on u
 When Trust In AI Leaps Up, Productivity FollowsMay 08, 2025 am 11:11 AM
When Trust In AI Leaps Up, Productivity FollowsMay 08, 2025 am 11:11 AMBuilding trust is paramount for successful AI adoption in business. This is especially true given the human element within business processes. Employees, like anyone else, harbor concerns about AI and its implementation. Deloitte researchers are sc


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

SecLists
SecLists is the ultimate security tester's companion. It is a collection of various types of lists that are frequently used during security assessments, all in one place. SecLists helps make security testing more efficient and productive by conveniently providing all the lists a security tester might need. List types include usernames, passwords, URLs, fuzzing payloads, sensitive data patterns, web shells, and more. The tester can simply pull this repository onto a new test machine and he will have access to every type of list he needs.

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

SublimeText3 Linux new version
SublimeText3 Linux latest version

SublimeText3 English version
Recommended: Win version, supports code prompts!

Atom editor mac version download
The most popular open source editor

