

 Technology peripheralsAICVPR\'24 Oral | A look at the past and present life of the pure sparse point cloud detector SAFDNet!
Technology peripheralsAICVPR\'24 Oral | A look at the past and present life of the pure sparse point cloud detector SAFDNet!CVPR\'24 Oral | A look at the past and present life of the pure sparse point cloud detector SAFDNet!

Written before&The author’s personal understanding
3D point cloud object detection is crucial to autonomous driving perception, how to efficiently learn features from sparse point cloud data Representation is a key challenge in the field of 3D point cloud object detection. In this article, we will introduce the HEDNet published by the team in NeurIPS 2023 and SAFDNet in CVPR 2024. HEDNet focuses on solving the problem that existing sparse convolutional neural networks are difficult to capture the dependencies between long-distance features, while SAFDNet is built based on HEDNet. Pure sparse point cloud detector. In point cloud object detection, traditional methods often rely on hand-designed feature extractors, which have limited effectiveness when processing sparse point cloud data. In recent years, deep learning-based methods have made significant progress in this field. HEDNet uses convolutional neural networks to extract features from sparse point cloud data, and solves key problems in sparse point cloud data through a specific network structure, such as capturing the dependencies between long-distance features. This method is in the paper of NeurIPS 2023
Previous life-HEDNet
Research background
Mainstream methods usually treat unstructured The point cloud is converted into regular elements and features are extracted using a sparse convolutional neural network or Transformer. Most existing sparse convolutional neural networks are mainly built by stacking submanifold manifold residual (SSR) modules. Each SSR module contains two submanifold convolutions using small convolution kernels. (Submanifold Sparse, SS) convolution. However, submanifold convolution requires the sparsity of input and output feature maps to remain constant, which hinders the model from capturing the dependencies between distant features. One possible solution is to replace the submanifold convolution in the SSR module with a regular sparse (RS) convolution. However, as the network depth increases, this results in lower feature map sparsity, resulting in a substantial increase in computational cost. Some research attempts to use sparse convolutional neural networks or Transformers based on large convolution kernels to capture the dependencies between long-distance features, but these methods either do not bring improvement in accuracy or require higher computational costs. In summary, we still lack a method that can efficiently capture the dependencies between distant features.
Method introduction
SSR module and RSR module
In order to improve the efficiency of the model, the existing 3D point cloud object detection Most of them use sparse convolution to extract features. Sparse convolution mainly includes RS convolution and SS convolution. RS convolution will spread sparse features to adjacent areas during the calculation process, thus reducing the sparsity of the feature map. In contrast, SS convolution keeps the sparsity of the input and output feature maps unchanged. Due to the computational cost of RS convolution by reducing the sparsity of feature maps, RS convolution is usually only used for feature map downsampling in existing methods. On the other hand, most element-based methods build sparse convolutional neural networks by stacking SSR modules to extract point cloud features. Each SSR module contains two SS convolutions and a skip connection that fuses input and output features.
Figure 1(a) shows the structure of a single SSR module. The valid feature in the figure refers to the non-zero feature, while the value of the empty feature is zero, which means that the position does not originally contain a point cloud. We define the sparsity of a feature map as the ratio of the area occupied by empty features to the total area of the feature map. In the SSR module, the input feature map is converted by two SS convolutions to obtain the output feature map. At the same time, the information of the input feature map is directly integrated into the output feature map through skip connection (Skip conn.). SS convolution only processes valid features to ensure that the output feature map of the SSR module has the same sparsity as the input feature map. However, such a design hinders information interaction between disconnected features. For example, the feature points marked by asterisks in the top feature map cannot receive information from the three feature points marked by red triangles outside the red dotted box in the bottom feature map, which limits the model's ability to model dependencies between long-distance features. Ability.
 Figure 1 Structural comparison of SSR, RSR and SED modules
Figure 1 Structural comparison of SSR, RSR and SED modules
In response to the above problems, a possible solution is to replace the SS convolution in the SSR module with RS convolution. Capture dependencies between distant features. We call this modified module the Regular Sparse Residual (RSR) module, and its structure is shown in Figure 1(b). In the figure, the expanded feature is an empty feature in the neighborhood of valid features. RS convolution processes both effective features and features to be diffused, and its convolution kernel center traverses these feature areas. This design results in a lower sparsity in the output feature image. Stacked RS convolution will reduce the sparsity of the feature map more quickly, resulting in a significant reduction in model efficiency. This is also the reason why existing methods usually use RS convolution for feature downsampling. Here, it is more appropriate for us to translate expanded features into features to be diffused.
SED module and DED module
The design goal of the SED module is to overcome the limitations of the SSR module. The SED module shortens the spatial distance between distant features through feature downsampling, and at the same time restores the lost detailed information through multi-scale feature fusion. Figure 1(c) shows an example of an SED module with two feature scales. This module first uses a 3x3 RS convolution with a stride of 3 for feature downsampling (Down). After feature downsampling, the disconnected effective features in the bottom feature map are integrated into the middle feature map and adjacent effective features. Then, the interaction between effective features is achieved by using an SSR module to extract features on the intermediate feature map. Finally, the intermediate feature maps are upsampled (UP) to match the resolution of the input feature maps. It is worth noting that here only the sample features are upsampled to the regions corresponding to valid features in the input feature map. Therefore, the SED module can maintain the sparsity of feature maps. The design goal of the SED module is to overcome the limitations of the SSR module. The SED module shortens the spatial distance between distant features through feature downsampling, and at the same time restores the lost detailed information through multi-scale feature fusion. Figure 1(c) shows an example of an SED module with two feature scales. This module first uses a 3x3 RS convolution with a stride of 3 for feature downsampling (Down). After feature downsampling, the disconnected effective features in the bottom feature map are integrated into the middle feature map and adjacent effective features. Then, the interaction between effective features is achieved by using an SSR module to extract features on the intermediate feature map. Finally, the intermediate feature maps are upsampled (UP) to match the resolution of the input feature maps. It is worth noting that here only the sample features are upsampled to the regions corresponding to valid features in the input feature map. Therefore, the SED module can maintain the sparsity of feature maps. The design goal of the SED module is to overcome the limitations of the SSR module
The SED module demonstrates a specific implementation of the SED module with three characteristic scales. The number in parentheses represents the ratio of the resolution of the corresponding feature map to the resolution of the input feature map. The SED module adopts an asymmetric codec structure, which uses the encoder to extract multi-scale features and gradually fuses the extracted multi-scale features through the decoder. The SED module uses RS convolution as the feature downsampling layer and sparse deconvolution as the feature upsampling layer. By using an encoder-decoder structure, the SED module facilitates information interaction between disconnected features in space, thereby enabling the model to capture dependencies between distant features.
 Figure 2 SED and DED module structures
Figure 2 SED and DED module structures
On the other hand, the current mainstream 3D point cloud detectors mainly rely on object center features for prediction, but in sparse convolutional network extraction In the feature map, there may be holes in the center area of the object, especially on large objects. To solve this problem, we propose the DED module, whose structure is shown in Figure 2(b). The DED module has the same structure as the SED module, it replaces the SSR module in the SED module with a Dense Residual (DR) module, and replaces the RS convolution used for feature downsampling with DR with a stride of 2 module and replaces sparse deconvolution for feature upsampling with dense deconvolution. These designs enable the DED module to effectively diffuse sparse features toward the center area of the object.
HEDNet
Based on the SED module and the DED module, we propose the hierarchical codec network HEDNet. As shown in Figure 3, HEDNet extracts high-level sparse features through a 3D sparse backbone network, then diffuses the sparse features to the center area of the object through a 2D dense backbone network, and finally sends the features output by the 2D dense backbone network to the detection head for task prediction. . For the convenience of presentation, the feature map and subsequent feature downsampling layer are omitted in the figure. Macroscopically, HEDNet adopts a hierarchical network structure similar to SECOND, and the resolution of its feature maps gradually decreases; microscopically, HEDNet's core components SED module and DED module both adopt a codec structure. This is where the name HEDNet comes from.
 Figure 3 HEDNet overall framework
Figure 3 HEDNet overall framework
小Easter Egg
Why do we think of using the codec structure? In fact, HEDNet was inspired by our previous work CEDNet: A Cascade Encoder-Decoder Network for Dense Prediction (called CFNet before the name was changed). If you are interested, you can read our paper.
Experimental results
We compared the comprehensive performance of HEDNet with previously leading methods, and the results are shown in Figure 4. Compared with LargeKernel3D based on large convolution kernel CNN and DSVT-Voxel based on Transformer, HEDNet achieves better results in both detection accuracy and model inference speed. It is worth mentioning that compared with the previous state-of-the-art method DSVT, HEDNet achieves higher detection accuracy and increases model inference speed by 50%. More detailed results can be found in our paper.

Figure 4 Comprehensive performance comparison on the Waymo Open data set
This life-SAFDNet
Research background
Voxel-based methods usually convert sparse voxel features into dense feature maps, and then extract features through dense convolutional neural networks for prediction. We call this type of detector hybrid detector, and its structure is shown in Figure 5(a). This type of method performs well in small-range (200 meters) detection scenarios. Applications. A possible solution is to build a pure sparse detector by removing the dense feature maps in existing hybrid detectors, but this will lead to a significant degradation in the detection performance of the model, as most hybrid detectors currently Prediction relies on object center features. When using pure sparse detectors to extract features, the center area of large objects is usually empty. This is the problem of missing object center features. Therefore, learning appropriate object representations is crucial for building purely sparse detectors.
Figure 5 Structural comparison of hybrid detector, FSDv1 and SAFDNet In order to solve the problem of missing object center features, FSDv1 (Figure 5(b)) first The original point cloud is divided into foreground points and background points, and then the foreground points are clustered through the center point voting mechanism, and instance features are extracted from each cluster for initial prediction, and finally further refined through the Group Correction Head. In order to reduce the inductive bias introduced by manual extraction of instance features, FSDv2 uses a virtual voxelization module to replace the instance clustering operation in FSDv1. The FSD series of methods are quite different from widely used detection frameworks such as CenterPoint, and introduce a large number of hyperparameters, making it challenging to deploy these methods in real scenarios. Different from the FSD series of methods, VoxelNeXt directly predicts based on the voxel features closest to the center of the object, but sacrifices detection accuracy.
In order to solve the problem of missing object center features, FSDv1 (Figure 5(b)) first The original point cloud is divided into foreground points and background points, and then the foreground points are clustered through the center point voting mechanism, and instance features are extracted from each cluster for initial prediction, and finally further refined through the Group Correction Head. In order to reduce the inductive bias introduced by manual extraction of instance features, FSDv2 uses a virtual voxelization module to replace the instance clustering operation in FSDv1. The FSD series of methods are quite different from widely used detection frameworks such as CenterPoint, and introduce a large number of hyperparameters, making it challenging to deploy these methods in real scenarios. Different from the FSD series of methods, VoxelNeXt directly predicts based on the voxel features closest to the center of the object, but sacrifices detection accuracy.
So what does the pure sparse point cloud detector we want look like? First, the structure should be simple, so that it can be directly deployed into practical applications. An intuitive idea is to make minimal changes to build a pure sparse detector based on the currently widely used hybrid detector architecture such as CenterPoint; secondly, in terms of performance It must at least match the current leading hybrid detectors and be applicable to different ranges of detection scenarios.
Method IntroductionStarting from the above two requirements, we constructed a pure sparse 3D point cloud object detector SAFDNet based on HEDNet. Its macro structure is shown in Figure 5(c) ) shown. SAFDNet first uses a sparse voxel feature extractor to extract sparse point cloud features, and then uses an Adaptive Feature Diffusion (AFD) strategy and a 2D sparse convolutional neural network to diffuse the sparse features to the center area of the object to solve the problem of the center of the object. Missing features problem, and finally prediction based on sparse voxel features. SAFDNet can perform efficient calculations using only sparse features, and most of its structural design and hyperparameters are consistent with the baseline hybrid detectors, making it easy to adapt to actual application scenarios to replace existing hybrid detectors. The specific structure of SAFDNet is introduced below.
SAFDNet overall frameworkFigure 6 shows the overall framework of SAFDNet. Similar to existing hybrid detectors, SAFDNet mainly consists of three parts: a 3D sparse backbone network, a 2D sparse backbone network and a sparse detection head. The 3D sparse backbone network is used to extract 3D sparse voxel features and convert these features into 2D sparse BEV features. The 3D sparse backbone network uses the 3D-EDB module to promote information interaction between long-distance features (the 3D-EDB module is the SED module built based on 3D sparse convolution, and the 2D-EDB module below is similar). The 2D sparse backbone network receives the sparse BEV features output by the 3D sparse backbone network as input. It first classifies each voxel to determine whether the geometric center of each voxel falls within the object bounding box of a specific category or whether it belongs to the background area. Then, the sparse features are diffused to the center area of the object through the AFD operation and the 2D-EDB module. This part is the core component of SAFDNet. The sparse detection head makes predictions based on the sparse BEV features output by the 2D sparse backbone network. SAFDNet adopts the detection head design proposed by CenterPoint, and we made some adjustments to it to adapt to sparse features. Please see the paper for more details.
Figure 6 SAFDNet overall frameworkAdaptive Feature Diffusion (AFD)
Since the point cloud generated by lidar is mainly distributed on the surface of the object, using a pure sparse detector to extract features for prediction will face the lack of object center features question. So can the detector extract features closer to or located at the center of the object while maintaining feature sparsity as much as possible? An intuitive idea is to spread sparse features into neighboring voxels. Figure 6(a) shows an example of a sparse feature map. The red dot in the figure represents the center of the object. Each square represents a voxel. The dark orange squares are non-empty voxels whose geometric centers fall within the object bounding box. The dark blue squares are non-empty voxels whose geometric center falls outside the object's bounding box, and the white squares are empty voxels. Each non-empty voxel corresponds to a non-empty feature. Figure 7(b) is obtained by uniformly diffusing the non-empty features in Figure 7(a) to the neighborhood of KxK (K is 5). Diffused non-empty voxels are shown in light orange or light blue.
 Figure 7 Schematic diagram of uniform feature diffusion and adaptive feature diffusion
Figure 7 Schematic diagram of uniform feature diffusion and adaptive feature diffusion
By analyzing the sparse feature map output by the 3D sparse backbone network, we observe that: (a) less than 10% The voxels fall within the bounding box of the object; (b) small objects usually have non-null features near or on their center voxel. This observation suggests that spreading all non-null features into the same size domain may be unnecessary, especially for voxels within small object bounding boxes and in background regions. Therefore, we propose an adaptive feature diffusion strategy that dynamically adjusts the diffusion range based on the location of voxel features. As shown in Figure 7(c), this strategy brings voxel features within the bounding box of large objects closer to the object center by allocating a larger diffusion range to these features, while at the same time by assigning voxel features within the bounding box of small objects and in the background area Voxel features are assigned a smaller diffusion range to maintain feature sparsity as much as possible. In order to implement this strategy, voxel classification (Voxel classification) is required to determine whether the geometric center of any non-empty voxel is within the bounding box of a specific category of objects or belongs to the background area. Please refer to the paper for more details on voxel classification. By using an adaptive feature diffusion strategy, the detector is able to maintain feature sparsity as much as possible, thereby benefiting from efficient computation of sparse features.
Main experimental results
We compared SAFDNet with the previous best methods in terms of comprehensive performance, and the results are shown in Figure 8. On the Waymo Open dataset with a smaller detection range, SAFDNet achieved comparable detection accuracy with the previous best pure sparse detector FSDv2 and our proposed hybrid detector HEDNet, but the inference speed of SAFDNet is 2 times that of FSDv2 and HEDNet 1.2 times. On the Argoverse2 data set with a large detection range, compared with the pure sparse detector FSDv2, SAFDNet improved the indicator mAP by 2.1%, and the inference speed reached 1.3 times that of FSDv2; compared with the hybrid detector HEDNet, SAFDNet improved The indicator mAP increased by 2.6%, and the inference speed reached 2.1 times that of HEDNet. In addition, when the detection range is large, the memory consumption of the hybrid detector HEDNet is much greater than that of the pure sparse detector. To sum up, SAFDNet is suitable for different ranges of detection scenarios and has excellent performance.

Figure 8 Main experimental results
Future work
SAFDNet is a pure sparse point cloud detector solution, so is there a problem with it? In fact, SAFDNet is just an intermediate product of our idea of a pure sparse detector. I think it is too violent and not concise and elegant enough. Please look forward to our follow-up work!
The codes of HEDNet and SAFDNet are open source and everyone is welcome to use them. Here is the link: https://github.com/zhanggang001/HEDNet
The above is the detailed content of CVPR\'24 Oral | A look at the past and present life of the pure sparse point cloud detector SAFDNet!. For more information, please follow other related articles on the PHP Chinese website!

 7 Powerful AI Prompts Every Project Manager Needs To Master NowMay 08, 2025 am 11:39 AM
7 Powerful AI Prompts Every Project Manager Needs To Master NowMay 08, 2025 am 11:39 AMGenerative AI, exemplified by chatbots like ChatGPT, offers project managers powerful tools to streamline workflows and ensure projects stay on schedule and within budget. However, effective use hinges on crafting the right prompts. Precise, detail
 Defining The Ill-Defined Meaning Of Elusive AGI Via The Helpful Assistance Of AI ItselfMay 08, 2025 am 11:37 AM
Defining The Ill-Defined Meaning Of Elusive AGI Via The Helpful Assistance Of AI ItselfMay 08, 2025 am 11:37 AMThe challenge of defining Artificial General Intelligence (AGI) is significant. Claims of AGI progress often lack a clear benchmark, with definitions tailored to fit pre-determined research directions. This article explores a novel approach to defin
 IBM Think 2025 Showcases Watsonx.data's Role In Generative AIMay 08, 2025 am 11:32 AM
IBM Think 2025 Showcases Watsonx.data's Role In Generative AIMay 08, 2025 am 11:32 AMIBM Watsonx.data: Streamlining the Enterprise AI Data Stack IBM positions watsonx.data as a pivotal platform for enterprises aiming to accelerate the delivery of precise and scalable generative AI solutions. This is achieved by simplifying the compl
 The Rise of the Humanoid Robotic Machines Is Nearing.May 08, 2025 am 11:29 AM
The Rise of the Humanoid Robotic Machines Is Nearing.May 08, 2025 am 11:29 AMThe rapid advancements in robotics, fueled by breakthroughs in AI and materials science, are poised to usher in a new era of humanoid robots. For years, industrial automation has been the primary focus, but the capabilities of robots are rapidly exp
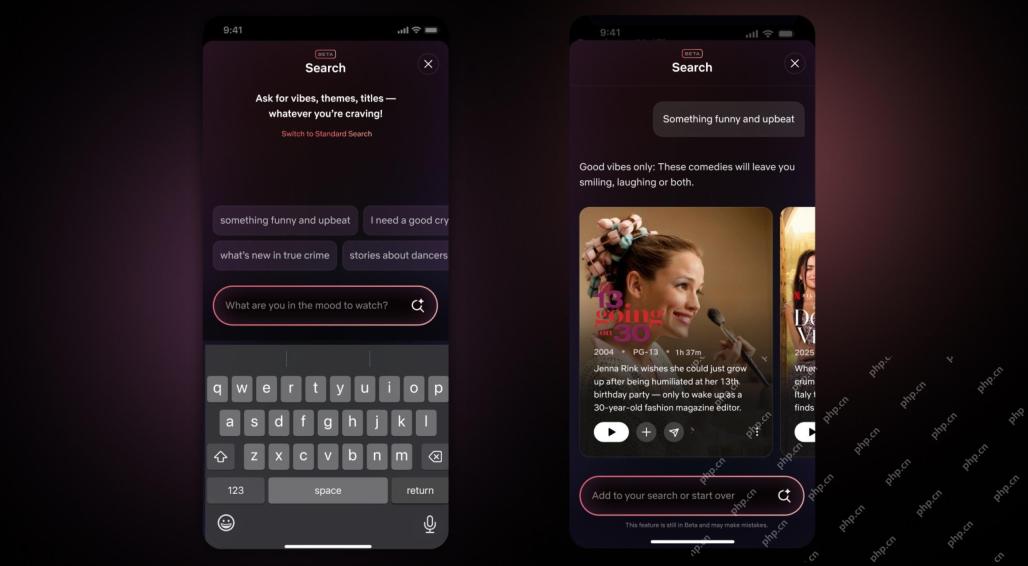 Netflix Revamps Interface — Debuting AI Search Tools And TikTok-Like DesignMay 08, 2025 am 11:25 AM
Netflix Revamps Interface — Debuting AI Search Tools And TikTok-Like DesignMay 08, 2025 am 11:25 AMThe biggest update of Netflix interface in a decade: smarter, more personalized, embracing diverse content Netflix announced its largest revamp of its user interface in a decade, not only a new look, but also adds more information about each show, and introduces smarter AI search tools that can understand vague concepts such as "ambient" and more flexible structures to better demonstrate the company's interest in emerging video games, live events, sports events and other new types of content. To keep up with the trend, the new vertical video component on mobile will make it easier for fans to scroll through trailers and clips, watch the full show or share content with others. This reminds you of the infinite scrolling and very successful short video website Ti
 Long Before AGI: Three AI Milestones That Will Challenge YouMay 08, 2025 am 11:24 AM
Long Before AGI: Three AI Milestones That Will Challenge YouMay 08, 2025 am 11:24 AMThe growing discussion of general intelligence (AGI) in artificial intelligence has prompted many to think about what happens when artificial intelligence surpasses human intelligence. Whether this moment is close or far away depends on who you ask, but I don’t think it’s the most important milestone we should focus on. Which earlier AI milestones will affect everyone? What milestones have been achieved? Here are three things I think have happened. Artificial intelligence surpasses human weaknesses In the 2022 movie "Social Dilemma", Tristan Harris of the Center for Humane Technology pointed out that artificial intelligence has surpassed human weaknesses. What does this mean? This means that artificial intelligence has been able to use humans
 Venkat Achanta On TransUnion's Platform Transformation And AI AmbitionMay 08, 2025 am 11:23 AM
Venkat Achanta On TransUnion's Platform Transformation And AI AmbitionMay 08, 2025 am 11:23 AMTransUnion's CTO, Ranganath Achanta, spearheaded a significant technological transformation since joining the company following its Neustar acquisition in late 2021. His leadership of over 7,000 associates across various departments has focused on u
 When Trust In AI Leaps Up, Productivity FollowsMay 08, 2025 am 11:11 AM
When Trust In AI Leaps Up, Productivity FollowsMay 08, 2025 am 11:11 AMBuilding trust is paramount for successful AI adoption in business. This is especially true given the human element within business processes. Employees, like anyone else, harbor concerns about AI and its implementation. Deloitte researchers are sc


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Atom editor mac version download
The most popular open source editor

SublimeText3 English version
Recommended: Win version, supports code prompts!

SAP NetWeaver Server Adapter for Eclipse
Integrate Eclipse with SAP NetWeaver application server.

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

