



2022年是智能驾驶由L2向L3/L4跨越的窗口期,越来越多的汽车厂商开始布局更高级别的智能驾驶量产,汽车智能化时代已悄然而至。
随着激光雷达硬件的技术提升,车规级量产和成本下行,高级别智能驾驶功能促进了激光雷达在乘用车领域的量产上车,多款搭载激光雷达的车型将在今年交付,2022年也被称为“激光雷达上车元年”。
01 激光雷达传感器vs图像传感器
激光雷达是一种用于精准获取物体三维位置的传感器,本质上是激光探测和测距。凭借在目标轮廓测量、通用障碍物检出等方面所具有的极佳性能,正在成为L4自动驾驶的核心配置。
然而,激光雷达的测距范围(一般在200米左右,不同厂商的量产型号指标各异)导致感知范围远小于图像传感器。
又由于其角分辨率(一般为0.1°或0.2°)比较小,导致点云的分辨率远小于图像传感器,在远距离感知时,投射到目标物上的点可能及其稀疏,甚至无法成像。对于点云目标检测来说,算法真正能用的点云有效距离大约只有100米左右。
图像传感器能以高帧率、高分辨率获取周围复杂信息,且价格便宜,可以部署多个不同FOV和分辨率的传感器,用于不同距离和范围的视觉感知,分辨率可以达到2K-4K。
但图像传感器是一种被动式传感器,深度感知不足,测距精度差,特别是在恶劣环境下完成感知任务的难度会大幅提升。
在面对强光、夜晚低照度、雨雪雾等天气和光线环境,智能驾驶对传感器的算法要求很高。激光雷达虽然对环境光线影响不敏感,但对于积水路面、玻璃墙面等,测距将收到很大影响。
可以看出,激光雷达和图像传感器各有优劣。大多数高级别智能驾驶乘用车选择将不同传感器进行融合使用,优势互补、冗余融合。
这样的融合感知方案也成为了高级别自动驾驶的关键技术之一。
02 基于深度学习的点云和图像融合感知
点云和图像的融合属于多传感器融合(Multi-Sensor Fusion,MSF)的技术领域,有传统的随机方法和深度学习方法,按照融合系统中信息处理的抽象程度,主要分为三个层次:
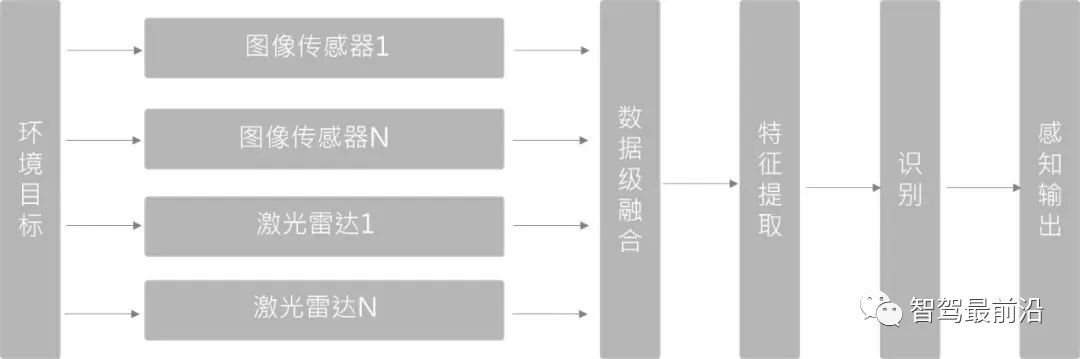
数据层融合(Early Fusion)
首先将传感器的观测数据融合,然后从融合的数据中提取特征进行识别。在3D目标检测中,PointPainting(CVPR20)采用这种方式,PointPainting方法先是对图像做语义分割,并将分割后的特征通过点到图像像素的矩阵映射到点云上,然后将这个“绘制点”的点云送到3D点云的检测器对目标Box进行回归。
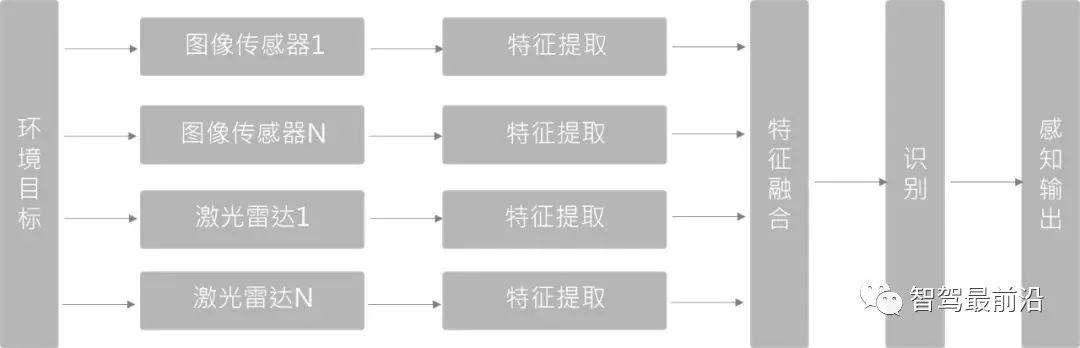
特征层融合(Deep Fusion)
先从每种传感器提供的观测数据中提取各自然数据特征,对这些特征融合后进行识别。在基于深度学习的融合方法中,这种方式对点云和图像分支都各自采用特征提取器,对图像分支和点云分支的网络在前反馈的层次中逐语义级别融合,做到多尺度信息的语义融合。
基于深度学习的特征层融合方法,对于多个传感器之间的时空同步要求很高,一旦同步不好,直接影响特征融合的效果。同时,由于尺度和视角的差异,LiDAR和图像的特征融合很难达到1+1>2的效果。
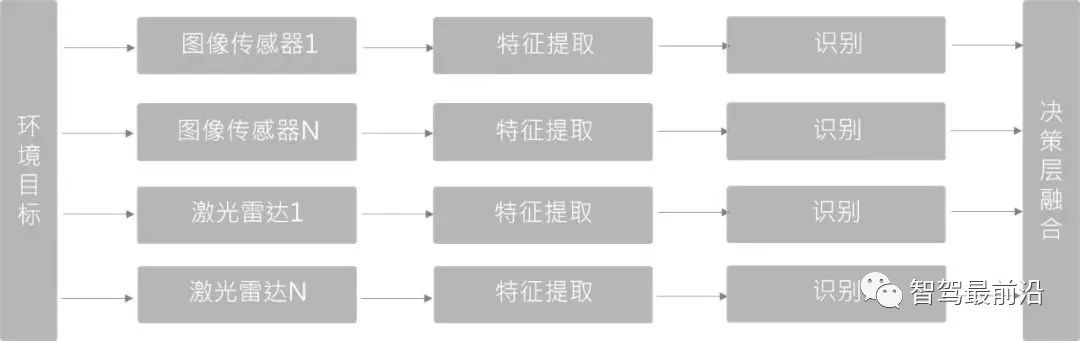
决策层融合(Late Fusion)
相对前两种来说,是复杂度最低的一种融合方式。不在数据层或特征层融合,是一种目标级别的融合,不同传感器网络结构互不影响,可以独立训练和组合。
由于决策层融合的两类传感器和检测器相互独立,一旦某传感器发生故障,仍可进行传感器冗余处理,工程上鲁棒性更好。
随着激光雷达与视觉融合感知技术的不断迭代,以及不断积累的知识场景与案例,会出现越来越多的全栈融合计算解决方案为自动驾驶带来更加安全与可靠的未来。
以上是一文读懂自动驾驶的激光雷达与视觉融合感知的详细内容。更多信息请关注PHP中文网其他相关文章!

 AI游戏开发通过Upheaval的Dreamer Portal进入其代理时代May 02, 2025 am 11:17 AM
AI游戏开发通过Upheaval的Dreamer Portal进入其代理时代May 02, 2025 am 11:17 AM动荡游戏:与AI代理商的游戏开发彻底改变 Roupheaval是一家游戏开发工作室,由暴风雪和黑曜石等行业巨头的退伍军人组成,有望用其创新的AI驱动的Platfor革新游戏创作
 Uber想成为您的Robotaxi商店,提供商会让他们吗?May 02, 2025 am 11:16 AM
Uber想成为您的Robotaxi商店,提供商会让他们吗?May 02, 2025 am 11:16 AMUber的Robotaxi策略:自动驾驶汽车的骑车生态系统 在最近的Curbivore会议上,Uber的Richard Willder推出了他们成为Robotaxi提供商的乘车平台的策略。 利用他们在
 AI代理玩电子游戏将改变未来的机器人May 02, 2025 am 11:15 AM
AI代理玩电子游戏将改变未来的机器人May 02, 2025 am 11:15 AM事实证明,视频游戏是尖端AI研究的宝贵测试场所,尤其是在自主代理和现实世界机器人的开发中,甚至有可能促进人工通用智能(AGI)的追求。 一个
 创业公司工业综合体VC 3.0和James Currier的宣言May 02, 2025 am 11:14 AM
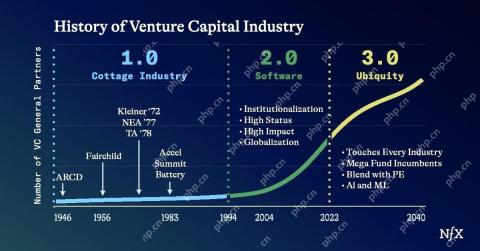
创业公司工业综合体VC 3.0和James Currier的宣言May 02, 2025 am 11:14 AM不断发展的风险投资格局的影响在媒体,财务报告和日常对话中显而易见。 但是,对投资者,初创企业和资金的具体后果经常被忽略。 风险资本3.0:范式
 Adobe在Adobe Max London 2025更新创意云和萤火虫May 02, 2025 am 11:13 AM
Adobe在Adobe Max London 2025更新创意云和萤火虫May 02, 2025 am 11:13 AMAdobe Max London 2025对Creative Cloud和Firefly进行了重大更新,反映了向可访问性和生成AI的战略转变。 该分析结合了事件前简报中的见解,并融合了Adobe Leadership。 (注意:Adob
 Llamacon宣布的所有元数据May 02, 2025 am 11:12 AM
Llamacon宣布的所有元数据May 02, 2025 am 11:12 AMMeta的Llamacon公告展示了一项综合的AI策略,旨在直接与OpenAI等封闭的AI系统竞争,同时为其开源模型创建了新的收入流。 这个多方面的方法目标bo
 关于AI仅仅是普通技术的主张的酿造争议May 02, 2025 am 11:10 AM
关于AI仅仅是普通技术的主张的酿造争议May 02, 2025 am 11:10 AM人工智能领域对这一论断存在严重分歧。一些人坚称,是时候揭露“皇帝的新衣”了,而另一些人则强烈反对人工智能仅仅是普通技术的观点。 让我们来探讨一下。 对这一创新性人工智能突破的分析,是我持续撰写的福布斯专栏文章的一部分,该专栏涵盖人工智能领域的最新进展,包括识别和解释各种有影响力的人工智能复杂性(请点击此处查看链接)。 人工智能作为普通技术 首先,需要一些基本知识来为这场重要的讨论奠定基础。 目前有大量的研究致力于进一步发展人工智能。总目标是实现人工通用智能(AGI)甚至可能实现人工超级智能(AS
 模型公民,为什么AI值是下一个业务码May 02, 2025 am 11:09 AM
模型公民,为什么AI值是下一个业务码May 02, 2025 am 11:09 AM公司AI模型的有效性现在是一个关键的性能指标。自AI BOOM以来,从编写生日邀请到编写软件代码的所有事物都将生成AI使用。 这导致了语言mod的扩散


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 英文版
推荐:为Win版本,支持代码提示!

SublimeText3汉化版
中文版,非常好用

WebStorm Mac版
好用的JavaScript开发工具

VSCode Windows 64位 下载
微软推出的免费、功能强大的一款IDE编辑器

