



赋予机器人对日常物体的 3D 理解是机器人应用中的一项重大挑战。
在未知环境中进行探索时,由于物体形状的多样性,现有的物体位姿估计方法仍然不能令人满意。

最近浙江大学、字节跳动人工智能实验室和香港中文大学的研究者联合提出了一个新的框架,用于从单个 RGB-D 图像进行类别级物体形状和位姿估计。

论文地址:https://arxiv.org/abs/2210.01112
项目链接:https://zju3dv.github.io/gCasp
为了处理类别内物体的形状变化,研究人员采用语义原始表示,将不同的形状编码到一个统一的隐空间中,这种表示是在观察到的点云和估计的形状之间建立可靠对应关系的关键。
然后通过设计的对刚体相似变换不变的形状描述子,解耦了物体的形状和位姿估计,从而支持任意位姿中目标物体的隐式形状优化。实验表明所提出的方法在公开数据集中实现了领先的位姿估计性能。
研究背景
在机器人的感知与操作领域,估计日常物体的形状和位姿是一项基本功能,并且具有多种应用,其中包括 3D 场景理解、机器人操作和自主仓储。
该任务的早期工作大多集中在实例级位姿估计上,这些工作主要通过将观察到的物体与给定的 CAD 模型对齐来获得物体位姿。
然而,这样的设置在现实世界的场景中是有限的,因为很难预先获得一个任意给定物体的确切模型。
为了推广到那些没见过但是在语义上熟悉的物体,类别级别物体位姿估计正在引起越来越多的研究关注,因为它可以潜在地处理真实场景中同一类别的各种实例。

现有的类别级位姿估计方法通常尝试预测一个类中实例的像素级归一化坐标,或者采用形变之后的参考先验模型来估计物体位姿。
尽管这些工作已经取得了很大的进步,但是当同一类别中存在较大的形状差异时,这些一次性预测方法仍然面临困难。
为了处理同一类内物体的多样性,一些工作利用神经隐式表示,通过迭代优化隐式空间中的位姿和形状来适应目标物体的形状,并获得了更好的性能。
在类别级物体位姿估计中有两个主要挑战,一是巨大的类内形状差异,二是现有的方法将形状和位姿的耦合在一起进行优化,这样容易导致优化问题更加复杂。
在这篇论文中,研究人员通过设计的对刚体相似变换不变的形状描述子,解耦了物体的形状和位姿估计,从而支持任意位姿中目标物体的隐式形状优化。最后再根据估计形状与观测之间的语义关联,求解出物体的尺度与位姿。
算法介绍
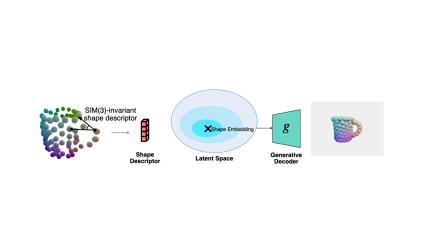
算法由三个模块组成,语义原语提取、生成式形状估计和物体位姿估计。

算法的输入是单张 RGB-D 图像,算法使用预先训练好的 Mask R-CNN 获得 RGB 图像的语义分割结果,然后根据相机内参反投影得到每个物体的点云。该方法主要对点云进行处理,最终求得每个物体的尺度与6DoF位姿。
语义原语提取
DualSDF[1] 中提出了一种针对同类物体的语义原语的表示方法。如下图左所示,在同一类物体中,每个实例都被分成了一定数量的语义原语,每个原语的标签对应着某类物体的特定部位。
为了从观测点云中提取物体的语义原语,作者利用了一个点云分割网络,将观测点云分割成了带有标签的语义原语。

生成式的形状估计
3D的生成模型(如DeepSDF)大多是在归一化的坐标系下运行的。
然而在真实世界观测中的物体与归一化坐标系之间会存在一个相似位姿变换(旋转、平移以及尺度)。
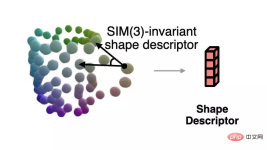
为了在位姿未知时来求解当前观测对应的归一化形状,作者基于语义原语表示,提出了一种对相似变换不变的形状描述子。
这种描述子如下图所示,它描述了不同原语构成的向量之间的夹角:
作者通过这个描述子来衡量当前观测与估计形状之间的误差,并通过梯度下降来使得估计形状与观测之间更加一致,过程如下图所示。
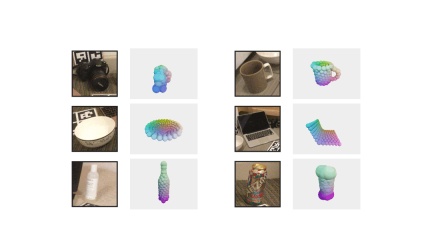
作者另外展示了更多的形状优化示例。
位姿估计
最后,通过观测点云与求解形状之间的语义原语对应关系,作者使用 Umeyama 算法求解了观测形状的位姿。

实验结果
作者在 NOCS 提供的 REAL275(真实数据集) 和 CAMERA25(合成数据集) 数据集上进行了对比实验,与其他方法在位姿估计精度上进行了对比,所提出的方法在多项指标上远超其他方法。
同时,作者也对比了需要在 NOCS 提供的训练集上训练的参数量,作者需要最少的2.3M的参数量便达到了最先进水平。

以上是仅需10%参数量即超越SOTA!浙大、字节、港中文联合提出「类别级位姿估计」任务新框架的详细内容。更多信息请关注PHP中文网其他相关文章!

 如何使用Huggingface Smollm建立个人AI助手Apr 18, 2025 am 11:52 AM
如何使用Huggingface Smollm建立个人AI助手Apr 18, 2025 am 11:52 AM利用“设备” AI的力量:建立个人聊天机器人CLI 在最近的过去,个人AI助手的概念似乎是科幻小说。 想象一下科技爱好者亚历克斯(Alex)梦见一个聪明的本地AI同伴 - 不依赖
 通过斯坦福大学激动人心的新计划,精神健康的AI专心分析Apr 18, 2025 am 11:49 AM
通过斯坦福大学激动人心的新计划,精神健康的AI专心分析Apr 18, 2025 am 11:49 AM他们的首届AI4MH发射于2025年4月15日举行,著名的精神科医生兼神经科学家汤姆·因斯尔(Tom Insel)博士曾担任开幕式演讲者。 Insel博士因其在心理健康研究和技术方面的杰出工作而闻名
 2025年WNBA选秀课程进入联盟成长并与在线骚扰作斗争Apr 18, 2025 am 11:44 AM
2025年WNBA选秀课程进入联盟成长并与在线骚扰作斗争Apr 18, 2025 am 11:44 AM恩格伯特说:“我们要确保WNBA仍然是每个人,球员,粉丝和公司合作伙伴,感到安全,重视和授权的空间。” anno
 Python内置数据结构的综合指南 - 分析VidhyaApr 18, 2025 am 11:43 AM
Python内置数据结构的综合指南 - 分析VidhyaApr 18, 2025 am 11:43 AM介绍 Python擅长使用编程语言,尤其是在数据科学和生成AI中。 在处理大型数据集时,有效的数据操作(存储,管理和访问)至关重要。 我们以前涵盖了数字和ST
 与替代方案相比,Openai新型号的第一印象Apr 18, 2025 am 11:41 AM
与替代方案相比,Openai新型号的第一印象Apr 18, 2025 am 11:41 AM潜水之前,一个重要的警告:AI性能是非确定性的,并且特定于高度用法。简而言之,您的里程可能会有所不同。不要将此文章(或任何其他)文章作为最后一句话 - 目的是在您自己的情况下测试这些模型
 AI投资组合|如何为AI职业建立投资组合?Apr 18, 2025 am 11:40 AM
AI投资组合|如何为AI职业建立投资组合?Apr 18, 2025 am 11:40 AM建立杰出的AI/ML投资组合:初学者和专业人士指南 创建引人注目的投资组合对于确保在人工智能(AI)和机器学习(ML)中的角色至关重要。 本指南为建立投资组合提供了建议
 代理AI对安全操作可能意味着什么Apr 18, 2025 am 11:36 AM
代理AI对安全操作可能意味着什么Apr 18, 2025 am 11:36 AM结果?倦怠,效率低下以及检测和作用之间的差距扩大。这一切都不应该令任何从事网络安全工作的人感到震惊。 不过,代理AI的承诺已成为一个潜在的转折点。这个新课
 Google与Openai:AI为学生打架Apr 18, 2025 am 11:31 AM
Google与Openai:AI为学生打架Apr 18, 2025 am 11:31 AM直接影响与长期伙伴关系? 两周前,Openai提出了强大的短期优惠,在2025年5月底之前授予美国和加拿大大学生免费访问Chatgpt Plus。此工具包括GPT-4O,A A A A A


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

SublimeText3汉化版
中文版,非常好用

MinGW - 适用于 Windows 的极简 GNU
这个项目正在迁移到osdn.net/projects/mingw的过程中,你可以继续在那里关注我们。MinGW:GNU编译器集合(GCC)的本地Windows移植版本,可自由分发的导入库和用于构建本地Windows应用程序的头文件;包括对MSVC运行时的扩展,以支持C99功能。MinGW的所有软件都可以在64位Windows平台上运行。

Dreamweaver CS6
视觉化网页开发工具

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

禅工作室 13.0.1
功能强大的PHP集成开发环境

