



机器人是由计算机控制的复杂机器,它具有类似人的肢体及感官功能;动作程序灵活;有一定程度的智能;在工作时可以不依赖人的操纵。机器人传感器在机器人的控制中起了非常重要的作用,正因为有了传感器,机器人才具备了类似人类的知觉功能和反应能力。那么,机器人的主要传感器有哪些呢?

1、机器人视觉传感器
20世纪50年代后期出现,发展十分迅速,是机器人中最重要的传感器之一。机器视觉从20世纪60年代开始首先处理积木世界,后来发展到处理室外的现实世界。20世纪70年代以后,实用性的视觉系统出现了。视觉一般包括三个过程:图像获取、图像处理和图像理解。相对而言,图像理解技术还很落后。
2、力觉传感器
机器人力传感器就安装部位来讲,可以分为关节力传感器、腕力传感器和指力传感器。国际上对腕力传感器的研究是从20世纪70年代开始的,主要研究单位有美国的DRAPER实验室、SRI研究所、IBM公司和日本的日立公司、东京大学等单位。
3、触觉传感器
作为视觉的补充,触觉能感知目标物体的表面性能和物理特性:柔软性、硬度、弹性、粗糙度和导热性等。触觉研究从20世纪80年代初开始,到20世纪90年代初已取得了大量的成果。
4、接近觉传感器
研究它的目的是使机器人在移动或操作过程中获知目标(障碍)物的接近程度,移动机器人可以实现避障,操作机器人可避免手爪对目标物由于接近速度过快造成的冲击。
5、听觉传感器
(1)特定人的语音识别系统
特定人语音识别方法是将事先指定的人的声音中的每一个字音的特征矩阵存储起来,形成一个标准模板(或叫模板),然后再进行匹配。它首先要记忆一个或几个语音特征,而且被指定人讲话的内容也必须是事先规定好的有限的几句话。特定人语音识别系统可以识别讲话的人是否是事先指定的人,讲的是哪一句话。
(2)非特定人的语音识别系统
非特定人的语音识别系统大致可以分为语言识别系统,单词识别系统,及数字音(0~9)识别系统。非特定人的语音识别方法则需要对一组有代表性的人的语音进行训练,找出同一词音的共性,这种训练往往是开放式的,能对系统进行不断的修正。在系统工作时,将接收到的声音信号用同样的办法求出它们的特征矩阵,再与标准模式相比较。看它与哪个模板相同或相近,从而识别该信号的含义。
以上是机器人的主要传感器有哪些 机器人的主要传感器介绍的详细内容。更多信息请关注PHP中文网其他相关文章!

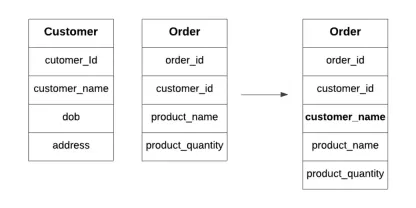 什么是数据库中的典型化?Apr 12, 2025 am 11:10 AM
什么是数据库中的典型化?Apr 12, 2025 am 11:10 AM介绍 想象一下,经营一个繁忙的咖啡馆,其中每一秒钟都很重要。您没有不断检查单独的库存和订单列表,而是将所有关键详细信息整合到一个易于阅读的板上。这类似于Denormaliza
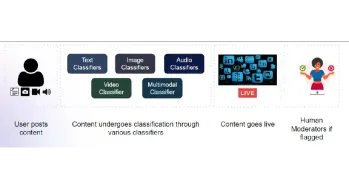 构建用于内容审核的多模式模型Apr 12, 2025 am 10:51 AM
构建用于内容审核的多模式模型Apr 12, 2025 am 10:51 AM介绍 想象一下,当一条进攻性帖子突然出现时,您正在浏览自己喜欢的社交媒体平台。在您点击报告按钮之前,它已经消失了。那是内容主音
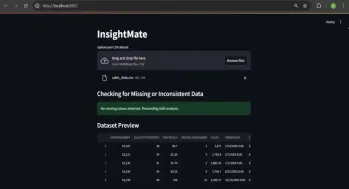 与洞察员自动化数据见解Apr 12, 2025 am 10:44 AM
与洞察员自动化数据见解Apr 12, 2025 am 10:44 AM介绍 在当今数据繁多的世界中,处理庞大的数据集可能会令人不知所措。这就是洞察力的来源。它旨在使探索您的数据变得轻而易举。只需上传您的数据集,您就会获得Instan

 什么是补充代理? |入门指南-Analytics VidhyaApr 12, 2025 am 10:40 AM
什么是补充代理? |入门指南-Analytics VidhyaApr 12, 2025 am 10:40 AM介绍 想象一下,开发与对话相同的应用程序。将没有复杂的开发环境可以设置,也无需查看配置文件。将概念转换为有价值的应用程序
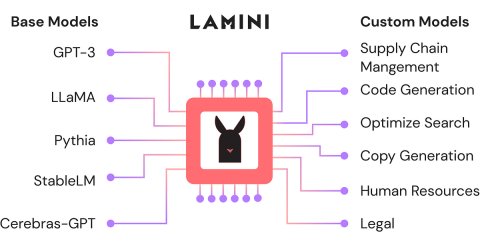 使用Lamini-Analytics Vidhya微调开源LLMApr 12, 2025 am 10:20 AM
使用Lamini-Analytics Vidhya微调开源LLMApr 12, 2025 am 10:20 AM最近,随着大语言模型和AI的兴起,我们看到了自然语言处理方面的无数进步。文本,代码和图像/视频生成等域中的模型具有存档的人类的推理和P
 Python中使用OpenCV和Roboflow进行性别检测 - 分析VidhyaApr 12, 2025 am 10:19 AM
Python中使用OpenCV和Roboflow进行性别检测 - 分析VidhyaApr 12, 2025 am 10:19 AM介绍 从面部图像中检测性别是计算机视觉的众多迷人应用之一。在这个项目中,我们将OpenCV结合在一起,以解决位置与性别分类的Roboflow API
 生成AI在个性化广告内容中的作用是什么?Apr 12, 2025 am 10:18 AM
生成AI在个性化广告内容中的作用是什么?Apr 12, 2025 am 10:18 AM介绍 自易货系统概念以来,广告世界一直在进化。广告商找到了创造性的方法来引起我们的关注。在当前年龄,消费者期望BR


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

SublimeText3 Linux新版
SublimeText3 Linux最新版

DVWA
Damn Vulnerable Web App (DVWA) 是一个PHP/MySQL的Web应用程序,非常容易受到攻击。它的主要目标是成为安全专业人员在合法环境中测试自己的技能和工具的辅助工具,帮助Web开发人员更好地理解保护Web应用程序的过程,并帮助教师/学生在课堂环境中教授/学习Web应用程序安全。DVWA的目标是通过简单直接的界面练习一些最常见的Web漏洞,难度各不相同。请注意,该软件中

ZendStudio 13.5.1 Mac
功能强大的PHP集成开发环境

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

SublimeText3汉化版
中文版,非常好用

