
理想汽車引領大模型時代,智慧駕駛進入新階段

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-06-20 17:27:31999瀏覽
6月20日消息,理想汽車近日公佈了最新的智慧駕駛進展,推出了其全新產品理想 AD Max 3.0,並宣布該車將進入全新的大模型時代。據悉,本月內,理想汽車將向北京和上海的內測用戶交付不依賴高精地圖的城市NOA功能,併計劃在下半年向用戶開放通勤NOA功能。
通勤NOA功能的推出將顛覆傳統智慧駕駛的訓練方式,這是理想汽車的表態。使用者只需設定好自己的通勤路線,並讓車輛學習相關特徵,即可在該路線上使用NOA功能,無需等待整個城市的特徵訓練完成。預計所需時間為不到一周的簡單路線可以完成激活,而預計所需時間為2至3週的路線就複雜度而言更高,需要進行訓練。
據小編了解,通勤NOA功能的核心在於採用了BEV(Bird's Eye View)大模型,該模型已經具備即時產生穩定的道路結構資訊的能力,適用於絕大多數道路和路口。然而,在城市中的複雜路口上,僅依靠BEV大模型進行感知仍然存在一定的不穩定性。為解決這個問題,理想汽車採取了NPN(NeuralPriorNet,神經先驗網絡)特徵增強BEV模型的方法。
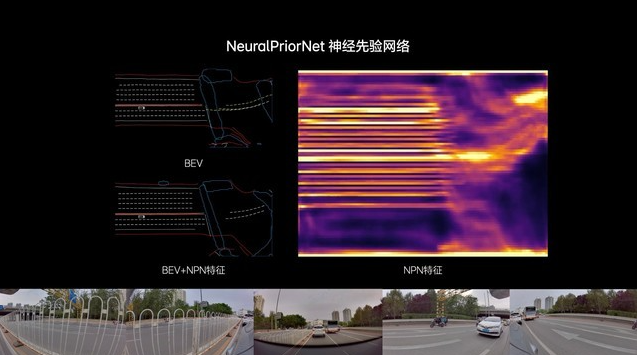
NPN特徵是指車輛預先提取的路口特徵,當車輛再次經過該路口時,可以將先前提取的NPN特徵與車端感知大模型的BEV特徵層進行融合,以獲得更準確的感知結果。理想汽車表示,他們的相關工作將在AI領域的國際頂級會議CVPR上發表,詳細介紹NPN特徵增強BEV模型的技術原理和實現方法。
理想汽車的最新進展顯示他們在智慧駕駛領域的持續創新和研發努力。透過推出通勤NOA功能以及採用NPN特徵增強BEV模型,他們致力於提供更安全、穩定和智慧的駕駛體驗,為用戶帶來更便捷舒適的出行選擇。隨著理想 AD Max 3.0的推出,人們對未來智慧移動的期待也更加高漲。
以上是理想汽車引領大模型時代,智慧駕駛進入新階段的詳細內容。更多資訊請關注PHP中文網其他相關文章!