
Rumah >Peranti teknologi >AI >Pandangan hebat simulasi pemanduan autonomi! Mari bercakap tentang industri simulasi pemanduan autonomi!
Pandangan hebat simulasi pemanduan autonomi! Mari bercakap tentang industri simulasi pemanduan autonomi!

- PHPzke hadapan
- 2023-10-17 11:17:011418semak imbas
Hello rakan pendengar! Tiba masanya untuk program Simulasi Grand View Garden sekali lagi! Hari ini saya akan memberi anda pengenalan ringkas kepada industri simulasi pemanduan autonomi.
Pertama sekali, mari kita bincangkan tentang sebab pemanduan autonomi memerlukan simulasi. Beberapa tahun yang lalu, ketika menonton If You Are the One, tetamu Huang Lan berkata bahawa dia hanya akan menerima pemanduan autonomi jika 2/3 orang menerimanya, yang mencerminkan kebimbangan orang ramai terhadap keselamatan pemanduan autonomi. Untuk memastikan keselamatan, algoritma pemanduan autonomi perlu menjalani sejumlah besar ujian jalan raya sebelum ia benar-benar boleh digunakan pada skala besar. Walau bagaimanapun, ujian sistem pemanduan autonomi adalah sangat "mahal": kos masa dan modal adalah besar, jadi orang ramai berharap untuk memindahkan seberapa banyak ujian yang mungkin ke sistem komputer, menggunakan simulasi untuk mendedahkan kebanyakan masalah dalam sistem pemanduan autonomi, dan mengurangkan permintaan ujian jalan di tapak, oleh itu, pekerjaan kami muncul.
1. Senario simulasi
Senario simulasi ialah kes ujian sistem pemanduan autonomi. Menurut klasifikasi Pusat Teknologi dan Penyelidikan Automotif China, senario ujian pemanduan autonomi boleh dibahagikan kepada empat kategori utama: [senario pemanduan semula jadi] [senario keadaan kerja berbahaya] [senario peraturan standard] [senario penyusunan semula parameter]: Senario pemanduan semula jadi diperoleh daripada keadaan sebenar kereta Keadaan pemanduan semula jadi adalah sumber data paling asas dalam membina senario ujian pemanduan autonomi senario keadaan kerja yang berbahaya terutamanya termasuk sejumlah besar persekitaran cuaca buruk, lalu lintas jalan raya yang kompleks dan kemalangan jalan raya biasa, seperti pangkalan data CIDAS; senario kawal selia standard digunakan untuk mengesahkan keberkesanan pemanduan autonomi Senario ujian asas adalah untuk membina senario ujian melalui piawaian dan prosedur penilaian sedia ada, dengan tujuan menguji keupayaan asas yang sepatutnya dimiliki oleh kenderaan autonomi; senario adalah untuk membuat parameter dan melengkapkan senario simulasi sedia ada Penjanaan rawak atau penyusunan semula automatik senario simulasi mempunyai ciri-ciri tidak terhad, berskala, batching dan automasi.
Proses pembinaan perpustakaan tempat kejadian boleh dibahagikan secara kasar kepada [Mengumpul data]: iaitu, data jalan sebenar dan data kawal selia, dsb., [Memproses data]: iaitu, mengekstrak ciri daripada data dan menggabungkannya untuk membentuk senario, dan [Data aplikasi]: menguji perpustakaan pemandangan dan memberikan maklum balas .
Pada masa ini, penjanaan adegan pemanduan semula jadi pada asasnya boleh diautomasikan: kenderaan pengumpulan mengumpul data mengikut format tertentu, algoritma menapis data serpihan utama yang mungkin berguna, algoritma mengira trajektori kereta dan lain-lain mengelilingi kenderaan dalam data serpihan, dan kemudian Tulis trajektori ke dalam fail huraian adegan, seperti fail adegan dalam format OpenScenario Banyak perisian simulasi sedia ada boleh terus menggunakan fail adegan yang diperoleh dengan cara ini untuk simulasi. Perlu diingatkan bahawa dalam kes ini, apa yang dipulihkan dalam perisian simulasi hanyalah "logik" adegan perlombongan sebenar Para peserta di tempat kejadian memakai "vest" model kenderaan dalam perpustakaan model 3D perisian simulasi dan adegan berperingkat kehidupan sebenar. Dalam erti kata lain, pemandangan yang dipulihkan dengan cara ini pastinya dapat memenuhi ujian algoritma kawalan, tetapi ia tidak dapat memulihkan maklumat penderiaan sensor pada masa itu, kerana lagipun, kenderaan latar depan dan latar belakang masih dimainkan oleh model tiga dimensi. perisian simulasi. Sekarang jika anda ingin memulihkan maklumat penderiaan sensor, anda boleh menggunakan NERF.
Jadi, apakah jenis senario simulasi yang bernilai? Pemulihan data pemanduan semula jadi yang dikumpul oleh kenderaan ujian jalan raya dianggap paling hampir dengan keadaan jalan raya sebenar dan sangat rawak Tetapi bukankah kita katakan bahawa ujian jalan raya semasa mengambil masa terlalu lama untuk mengikuti perjalanan? Ini memerlukan kami memproses data ujian jalan raya, mengekstrak pengenalan peserta trafik, dan kemudian menyusun semula dan menggabungkannya untuk membentuk adegan rawak berdasarkan data sebenar.
Sebagai contoh, kertas kerja popular Baidu pada tahun 2019 memperkenalkan sistem simulasi AADS mereka: Dalam sistem ini, kereta yang dilengkapi dengan kamera lidar dan binokular digunakan untuk mengimbas jalan untuk mendapatkan semua bahan untuk simulasi pemanduan autonomi, dan kemudian secara automatik rosak rakaman input ke latar belakang, pencahayaan pemandangan dan objek latar depan. Melalui teknologi sintesis paparan, sudut pandangan boleh diubah pada latar belakang statik untuk menjana imej sebenar dari mana-mana perspektif, dengan itu mensimulasikan pergerakan kereta berjalan dalam persekitaran yang berbeza. Jadi bagaimana anda membuktikan kesahihan senario penyusunan semula ini? Kertas itu menyebut kaedah penilaian dengan membandingkan kesan pengecaman algoritma persepsi dalam adegan maya dan adegan sebenar Ia juga menarik untuk menggunakan prestasi objek yang diukur untuk menilai alat pengukuran. Kemudian, beberapa penyelidikan NERF yang digunakan untuk pemanduan autonomi juga menggunakan set idea ini, seperti UniSim.
Saya secara peribadi percaya bahawa tidak kira betapa berkesannya senario simulasi data pemanduan semula jadi, ia hanya sesuai untuk menguji beberapa algoritma: tidak kira bagaimana kaedah ini digunakan, trajektori objek sekeliling direkodkan dan tidak boleh diubah berdasarkan tingkah laku daripada kenderaan itu. Ini seperti perbezaan antara filem dan permainan Adegan dalam filem hanya boleh dimainkan, tetapi permainan boleh mengubah adegan berdasarkan interaksi.
Mungkin dalam masa terdekat, digabungkan dengan simulasi aliran trafik dan data sebenar, penjanaan adegan rawak boleh batch mencipta adegan simulasi yang konsisten dengan keadaan trafik sebenar dan juga boleh berubah dengan tingkah laku kenderaan.
2. Pembangunan simulasi
Perpustakaan tempat kejadian yang kita bincangkan sebelum ini boleh dikatakan sedang menyediakan data untuk ujian simulasi pemanduan autonomi, jadi kerja pembangunan simulasi adalah untuk mencipta atau menambah baik alatan.
Pembangunan simulasi mungkin merangkumi aspek berikut:
- [Perpustakaan Senario]: Banyak yang telah saya katakan sebelum ini, dan ia akan merangkumi kandungan teknikal seperti pemprosesan data, pembelajaran mendalam, pangkalan data, dll.
- [Persepsi]: Dengan persekitaran simulasi, anda perlu Maklumat dipindahkan ke algoritma, jadi pelbagai model sensor perlu diwujudkan, seperti kamera, lidar, radar gelombang milimeter, radar ultrasonik, dsb., dan model peringkat prinsip fizikal dan model ideal ditubuhkan mengikut keperluan. Untuk melakukan kerja yang baik dalam pemodelan sensor memerlukan penyelidikan teori tentang prinsip kerja penderia, pemodelan komputer dan keupayaan pelaksanaan kejuruteraan proses fizikal, dan sokongan sejumlah besar data eksperimen.
- [Dinamik Kenderaan]: Perintah kawalan yang dikeluarkan oleh algoritma perlu mempunyai objek kawalan, jadi model dinamik kenderaan diperlukan boleh menerimanya dalam simulasi pemanduan autonomi Masukkan model dinamik profesional atau permudahkan mereka.
- [Middleware]: Pertukaran maklumat diperlukan antara algoritma dan platform simulasi, dan antara platform simulasi dengan fungsi yang berbeza, jadi sejumlah besar pembangunan antara muka diperlukan. Perisian tengah yang lebih biasa digunakan dalam fasa penyelidikan pemanduan autonomi ialah ROS, dan perisian tengah yang lebih biasa digunakan dalam fasa aplikasi ialah perisian tengah berasaskan AUTOSAR.
- [Enjin Simulasi]: Sesetengah syarikat suka membangunkan platform simulasi yang dibangunkan sendiri, jadi enjin fizik bertanggungjawab untuk pergerakan dan perlanggaran yang biasa digunakan ialah ODE, Bullet, DART, dll. Enjin pemaparan bertanggungjawab untuk tiga. paparan -dimensi, dan yang sumber terbuka ialah OGRE dan OpenGL. Unreal dan Unity ialah dua set enjin yang biasa digunakan untuk membuat permainan, baik untuk fizik dan rendering.
- 【Pecutan Simulasi】: Ia akan melibatkan pengkomputeran selari, pengkomputeran awan, dll. Ujian automatik juga boleh disertakan di sini.
- [Hadapan]: Saya melihat bahawa banyak jawatan pembangunan simulasi sebenarnya merekrut untuk bahagian hadapan, kerana dinamik simulasi mungkin memerlukan interaksi paparan, dsb.
Akhirnya, saya fikir mungkin terdapat titik ke-8 dengan keperluan lanjutan yang lebih tinggi: keupayaan untuk "tidak mengklik di mana-mana". Bolehkah anda menggunakan algoritma sumber terbuka untuk mengisi yang lain dan biarkan "gelung tertutup" berjalan?
3. Ujian Simulasi
Dengan data dan alatan yang diperlukan untuk ujian simulasi pemanduan autonomi, langkah seterusnya ialah ujian simulasi. Hari ini kami memperkenalkan beberapa pautan ujian simulasi biasa.
- [MIL Model-in-the-Loop]: Sejujurnya, saya tidak begitu tahu perbezaan antara model-in-the-loop dan perisian-in-the-loop (mungkin berkaitan dengan kebangkitan MBSE metodologi). Dalam erti kata yang sempit, model-in-the-loop ialah ujian yang menggunakan alat seperti MATLAB untuk mengesahkan fungsi logik algoritma sebelum menulis dan menyusun kod sebenar. Secara terang-terangan, ia adalah menggunakan model simulink untuk melaksanakan algoritma dan melakukan simulasi.
- [Perisian SIL dalam gelung]: Gunakan perisian kod terkumpul yang sebenar untuk ujian Semestinya ujian model-in-the-loop telah lulus hanya sama ada terdapat masalah dalam pengeluaran kod. Seperti HIL, SIL perlu menyediakan satu siri persekitaran operasi dan isyarat pra-maya lain yang tidak berkaitan dengan fungsi yang sedang diuji untuk objek yang diuji.
- [Perkakasan HIL dalam Gelung]: Secara umum, sebarang kaedah di mana sekeping perkakasan diuji dalam gelung boleh dipanggil HIL, jadi menguji sensor tertentu juga boleh dipanggil ujian HIL. Dalam erti kata yang sempit, kami biasanya merujuk kepada perkakasan pengawal dalam gelung, yang menggunakan komputer masa nyata untuk menjalankan model simulasi untuk mensimulasikan status pengendalian objek terkawal, menyambung kepada ECU yang sedang diuji melalui I Antara muka /O, dan menjalankan pemantauan menyeluruh dan menyeluruh terhadap ECU yang sedang diuji. Bermula dari HIL, ujian simulasi diperlukan untuk mempunyai prestasi masa nyata yang kukuh.
- [VIL Vehicle-in-the-loop]: Saya faham bahawa secara amnya terdapat dua kaedah kenderaan-dalam-gelung: satu ialah memasang kenderaan yang dilengkapi sistem pemanduan autonomi pada bangku ujian, dan mengeluarkan roda dan gantikannya dengan motor daya tarikan yang mensimulasikan beban, rupa bumi dan permukaan jalan Insentif yang diberikan kepada kenderaan disimulasikan melalui bangku ujian Dalam kaedah ini, jika sistem paparan yang baik ditambah, ia juga boleh digunakan sebagai pemandu masuk -sistem simulasi gelung yang lain ialah kenderaan boleh memandu di medan terbuka, Sistem simulasi menyediakan input sensor, supaya walaupun kenderaan berada di medan terbuka, algoritma juga akan berfikir bahawa terdapat pelbagai adegan yang berbeza di sekeliling Secara amnya, GPS kenderaan boleh digunakan untuk memberikan maklum balas kedudukan dan sikap kepada sistem simulasi.
4 Kerja harian
Banyak yang saya katakan dalam bahagian sebelum ini, yang semuanya memperkenalkan industri kita secara umum yang saya, seorang yang buta, telah mengetahuinya akan bercakap tentang apa yang kita lakukan setiap hari secara umum. Tugasan harian ini sudah tentu termasuk dalam bahagian kedua dan ketiga:
- [Persepsi]: Adalah penting untuk membina model penderia Anda perlu memberi perhatian kepada satu siri parameter setiap penderia, seperti jarak pengesanan, julat sudut pengesanan, resolusi, parameter herotan, parameter hingar, lokasi pemasangan, dll. ., serta Perjanjian komunikasi perkakasan dsb. Seterusnya, bergantung pada alat perisian simulasi yang digunakan, sama ada untuk "mengkonfigurasi" jenis sensor sedia ada atau untuk membangunkan jenis sensor baharu berdasarkan perisian simulasi. Untuk melatih atau menilai model algoritma, simulasi selalunya perlu memberikan nilai sebenar, seperti kotak sempadan 2D/3D, garisan lorong dan maklumat peta lain, grid penghunian 2D/3D, dsb. Jika fungsi sedia ada perisian simulasi tidak dapat memenuhi keperluan, ia juga perlu untuk Jurutera melakukan pembangunan menengah.
- [Dinamik Kenderaan]: Ia adalah perlu untuk mengkonfigurasi model kenderaan dalam perisian simulasi dinamik profesional mengikut parameter kenderaan, dan ia juga perlu untuk terus menulis model kinematik dan dinamik yang dipermudahkan berdasarkan formula yang dipermudahkan.
- [Perisian Tengah]: Pembangunan antara muka adalah bahagian penting dalam kerja, dan bertanggungjawab untuk "terjemahan" antara objek yang diuji dan perisian simulasi sebagai tambahan, antara muka API perisian digunakan untuk melaksanakan simulasi bersama antara tahap platform simulasi yang berbeza, seperti simulasi Scene digabungkan dengan simulasi dinamik kenderaan, ditambah simulasi aliran trafik, dan kemudian disatukan ke dalam penjadualan perisian pengurusan ujian automatik.
- [Pecutan Simulasi]: Saya juga meletakkan ujian automatik ke dalam pecutan simulasi, kerana jika ia boleh mencapai 7x24 jam ujian tanpa gangguan, ia juga merupakan satu cara untuk meningkatkan kecekapan! Ini melibatkan panggilan automatik platform simulasi, penulisan skrip automatik, data rakaman dan penilaian data mengikut keperluan kes penggunaan.
- 【Pembangunan Perisian】: Syarikat yang memerlukan perisian simulasi yang dibangunkan sendiri terutamanya menjalankan perniagaan ini.
Satu lagi perkara 6. [Analisis Keperluan]: Sebagai jurutera pembangunan simulasi, anda harus menjadi orang yang paling mengetahui alat yang anda gunakan, jadi apabila pelanggan (dalam dan luar) mempunyai keperluan baru, jurutera pembangunan simulasi harus mampu Mereka bentuk penyelesaian teknikal, mencadangkan keperluan perisian dan perkakasan serta rancangan projek berdasarkan keperluan dan keadaan khusus objek yang diuji. Jadi kadangkala, anda perlu melakukan kerja pengurusan produk dan projek.
5. Technology Stack

Perkataan "technology stack" kedengaran sangat asing, tetapi sebenarnya, kedudukan ini sepatutnya mengetahui segala-galanya. Saya menonton siri TV lama dahulu, di mana seorang doktor di jabatan kecemasan mentertawakan dirinya sendiri: Kami seperti minyak ular, dan pakar bedah lain adalah orang yang tidak boleh berubah. Saya selalu berfikir bahawa jurutera simulasi adalah seperti doktor kecemasan di hospital Mereka perlu mengetahui segala-galanya: algoritma apa yang perlu diuji, dan segala-galanya kecuali algoritma ini mesti disediakan, termasuk navigasi dan kedudukan, perancangan kawalan, pemprosesan data, penentukuran parameter, dll. Astronomi dan geografi, ramalan perubatan, astrologi, lukisan emas, kumpulan penghakiman dan willow... anda tidak perlu meminta penjelasan terperinci, dan memenuhi keperluan ujian algoritma dengan cepat adalah yang paling penting.

Apa yang dipanggil "pandangan keseluruhan" ini adalah kelebihan jurutera simulasi, tetapi hanya dengan pemahaman sebenar algoritma kami boleh melakukan kerja simulasi yang benar-benar boleh membantu meningkatkan algoritma, dan kami boleh pergi lebih jauh. Saya pergi terlalu jauh, mari kita bawa semula:
- [Kod]: Terutamanya C++/Python, tetapi jika ia melibatkan bahagian paparan bahagian hadapan, saya tidak faham. Secara umumnya, keperluannya pastinya tidak setinggi pembangunan algoritma, tetapi jika anda pakar dalam pembangunan perisian simulasi, itu adalah perkara lain.
- 【ROS】: Saya memilihnya kerana ROS masih merupakan bahagian yang tidak dapat dielakkan dalam bidang pemanduan autonomi dan penyelidikan algoritma robotik, dan komuniti ROS menyediakan banyak alatan siap sedia.
- 【Dinamik Kenderaan】: Anda mungkin tidak perlu tahu sebanyak jurutera kenderaan sebenar, tetapi anda perlu mengetahui prinsip asas. Selain itu, anda perlu mahir dalam pelbagai penukaran koordinat (ini mungkin tidak termasuk kenderaan, tetapi matematik).
- 【Prinsip Penderia】: Bagaimanakah pelbagai penderia seperti kamera, lidar dan radar gelombang milimeter pada kenderaan autonomi berfungsi, apakah rupa isyarat keluaran dan apakah parameter utama.
- [Peta]: Anda perlu memahami format fail yang digunakan dalam senario ujian simulasi, seperti opendrive dan openscenario, kerana kadangkala maklumat perlu diekstrak daripadanya sebagai input untuk simulasi sensor.
Di atas hanyalah ringkasan peribadi saya, rakan sekerja dialu-alukan untuk menambah di sini!

Untuk kesempurnaan artikel, saya juga akan memperkenalkan secara ringkas beberapa perisian simulasi yang biasa digunakan di pasaran dalam bahagian ini (ia sebenarnya bukan iklan! Jangan berkecil hati jika tiada dalam senarai).
- CarSim/CarMaker: Kedua-dua perisian ini ialah perisian simulasi dinamik yang berkuasa dan digunakan secara meluas oleh OEM dan pembekal di seluruh dunia. Mereka juga boleh mensimulasikan beberapa adegan jalan raya.
- Vissim/SUMO: Vissim ialah perisian simulasi aliran trafik mikroskopik terkemuka dunia yang disediakan oleh syarikat PTV Jerman. Vissim boleh membina pelbagai persekitaran trafik yang kompleks dengan mudah, dan juga boleh mensimulasikan gelagat interaktif kenderaan bermotor, trak, transit kereta api dan pejalan kaki dalam adegan simulasi. SUMO ialah perisian sumber terbuka yang boleh menambah jalan, mengedit perhubungan sambungan lorong, memproses kawasan persimpangan, mengedit pemasaan lampu isyarat, dsb. melalui penyuntingan interaktif.
- PreScan: Diperolehi oleh Siemens, antara muka utama untuk mencipta dan menguji algoritma termasuk MATLAB dan Simulink, yang boleh digunakan untuk MIL, SIL dan HIL.
- VTD: Sebagai perisian komersial, VTD mempunyai kebolehpercayaan yang kukuh dan fungsi komprehensif, meliputi pemodelan persekitaran jalan raya, pemodelan pemandangan trafik, simulasi cuaca dan persekitaran, simulasi penderia yang mudah dan realistik dari segi fizikal, pengurusan simulasi pemandangan dan imej masa nyata berketepatan tinggi . Rendering, dsb., adalah tidak keterlaluan untuk mengatakan bahawa VTD ialah perisian simulasi yang paling biasa digunakan dalam kalangan OEM domestik. Ia boleh menyokong proses pembangunan kitaran penuh daripada SIL kepada HIL dan VIL, dan rangka kerja modular terbuka boleh mensimulasikan bersama dengan mudah dengan alatan dan pemalam pihak ketiga.
- CARLA/AirSim: Dua platform simulasi sumber terbuka, kedua-duanya dibangunkan di UE, juga telah melancarkan versi Unity. CARLA boleh menghasilkan pemandangan dan menyokong peta berketepatan tinggi, dan menyokong konfigurasi penderia dan persekitaran yang fleksibel Ia menyokong berbilang kamera, lidar, GPS dan penderia lain, dan juga boleh melaraskan pencahayaan dan cuaca persekitaran. AirSim Microsoft mempunyai dua mod: dron dan kenderaan Fungsi dalam mod kenderaan adalah tidak mudah untuk membina persekitaran dan model kenderaan Komuniti tidak seaktif CARLA pengambilan orang untuk menulis JD pada masa hadapan , tidak banyak digunakan. Di samping itu, Sangxin Technology Co., Ltd. domestik baru-baru ini melancarkan OASIS yang dibangunkan berdasarkan CARLA, yang pada masa ini boleh dianggap sebagai versi dipertingkatkan CARLA sumber terbuka.
- 51SimOne/PanoSim: Kedua-dua ini adalah perisian simulasi domestik, dan ia boleh memenuhi fungsi utama perisian simulasi adegan.

Akhir sekali, satu lagi lgsvl: Pada asalnya, kelebihan lgsvl ialah ia lebih disepadukan dengan Apollo, tetapi saya mendengar bahawa lgsvl rasmi telah menyerah pada projek ini, jadi saya menasihati anda untuk meninggalkan perangkap ini.
6. Laluan pembelajaran
Saya percaya melalui pengenalan saya dalam lima bahagian pertama, pelajar sekolah bestari sudah boleh memahami laluan pembelajaran untuk menjadi jurutera simulasi pemanduan autonomi, dan dengan mengkritik kandungan lima bahagian pertama saya, Rakan sekerja muda juga boleh belajar bagaimana untuk maju. Tetapi dalam bahagian ini saya masih menulis beberapa pemahaman dangkal dalam hal ini.
Begitu banyak yang saya katakan sebelum ini, saya rasa anda juga dapat melihat bahawa simulasi pemanduan autonomi adalah bidang pelbagai disiplin yang boleh menerima pelajar dari banyak jurusan, termasuk tetapi tidak terhad kepada: komputer/kawalan/robot/jentera/kenderaan /Kuasa Elektronik dll.
Dari segi pengalaman dan teknologi, saya akan cuba menyenaraikan beberapa keperluan pekerjaan:
- Keupayaan pengekodan: Pelajar yang melakukan pengkomputeran awan simulasi, pelayan awan dan pembangunan lain yang berkaitan mungkin perlu mahir menggunakan C++/Go/Java untuk pembangunan, mempunyai tabiat pengaturcaraan yang baik dan menguasai corak reka bentuk biasa, struktur data dan Algoritma, biasa dengan sistem Linux, teknologi Docker dan pengetahuan berkaitan Kubernetes, dan pengalaman dalam pembangunan perkhidmatan awan ini bertujuan untuk platform ujian simulasi yang dibangunkan sendiri dengan paralelisme yang tinggi, penggunaan semula yang tinggi dan automasi tinggi. Di samping itu, sebagai tambahan kepada asas komputer yang kukuh, jawatan untuk perisian simulasi yang dibangunkan sendiri mungkin memerlukan pengalaman pembangunan enjin permainan, jadi pelajar yang terlibat dalam pembangunan permainan juga boleh bertukar kepada simulasi pemanduan autonomi (termasuk seni teknikal). Pelajar yang matlamatnya adalah untuk menggunakan perisian simulasi sedia ada untuk pembangunan dan penyepaduan menengah mungkin perlu mahir dalam C/C++ dan Python, dan biasa dengan pembangunan Linux/ROS Adalah lebih baik jika mereka mempunyai pengalaman dalam pembangunan perisian pertengahan gred automotif seperti AUTOSAR.
- Pengalaman perisian: Sudah tentu, sebarang pengalaman sebenar dalam menggunakan perisian simulasi pemanduan autonomi adalah satu kelebihan, tetapi memandangkan kebanyakan perisian komersial sangat mahal, ia sangat bergantung pada kekuatan makmal atau syarikat sekolah dalam hal ini. Dengan ketiadaan sokongan perisian komersial, saya fikir CARLA kini merupakan penyelesaian optimum untuk perisian sumber terbuka.
- Pengetahuan lapangan: Saya secara peribadi percaya bahawa sebagai jurutera simulasi pemanduan autonomi, adalah mustahil untuk mempunyai pemahaman yang mendalam tentang algoritma pemanduan autonomi, termasuk semua aspek pelaksanaan prinsip algoritma hanya dengan memahami algoritma yang lebih baik kami melakukan simulasi yang lebih baik. Di samping itu, jika anda seorang pelajar yang bukan jurusan komputer, adalah sangat penting untuk mempelajari kursus profesional dalam bidang ini dengan baik, seperti mesin, kenderaan, mekanik, elektronik, dll. Jika anda tegak, anda akan menjadi menakjubkan dan akan sentiasa digunakan.
Industri pemanduan autonomi semasa sedang mengalami turun naik yang besar, tetapi secara ringkasnya, jenis utama syarikat yang boleh menggunakan jurutera simulasi ialah jenis syarikat berikut: OEM, yang terutamanya menyepadukan perisian simulasi pengacuan aplikasi, tetapi kuasa baharu pada asasnya perlu melakukan Penyelidikan mereka sendiri; pembekal penyelesaian pemanduan autonomi, iaitu, algoritma Tahap 1, mungkin juga kebanyakannya merupakan simulasi yang dibangunkan sendiri oleh syarikat perisian yang baru sahaja bermula di kawasan ini di China, dan mereka pada asasnya adalah pemula.
Di penghujung bahagian ini, saya akan bercakap tentang pengalaman saya dalam "bertukar" daripada jentera tradisional. Sekolah tempat saya lulus dengan ijazah sarjana mempunyai budaya transcoding yang kuat Di kalangan pelajar Cina yang memasuki sekolah siswazah mekanikal dalam kelas saya, kira-kira tujuh puluh lapan daripada sepuluh terlibat dalam industri komputer selepas tamat pengajian. Disebabkan sistem pemilihan kursus yang agak longgar, pelajar digalakkan mengambil sebanyak mungkin kursus dari Pusat Pengajian Sains Komputer. Jadi dalam dua tahun itu, minyak urapan dibakar untuk mengekalkan jam matahari, dan kemiskinan adalah norma. Tetapi saya tidak ingat sama ada saya perlu lulus peperiksaan untuk mencari pekerjaan. Secara ringkasnya, bagaimana jentera berubah menjadi komputer: mendapat separuh ijazah dalam sains komputer. Malah, pada masa itu, bukan sahaja mekanik, tetapi semua jurusan berubah, dan ia bukan sahaja pelajar Cina, tetapi orang di seluruh dunia.
Tetapi apabila difikirkan semula, saya menyedari bahawa saya tidak berada dalam situasi yang sama, jadi saya terlepas peluang terbaik untuk transformasi. Apabila bercakap tentang pembelajaran sendiri, ia adalah lebih sukar: perkara yang paling penting ialah tiada masa, yang memerlukan bahan dan kaedah pembelajaran yang cekap. Oleh itu, secara relatifnya, kelas dalam talian adalah lebih cekap kerana terdapat guru untuk membimbing mereka. Kursus Coursera bagus, tetapi nampaknya agak mahal. Dalam beberapa tahun kebelakangan ini, semakin banyak sumber rangkaian sumber terbuka, tetapi kursus yang diambil tidak terlalu halus Lagipun, komputer adalah yang paling praktikal dan paling mudah untuk diamalkan. Terdapat juga banyak buku komputer klasik, seperti struktur data dan algoritma, buku asas C++... Saya tidak pernah membaca mana-mana daripadanya Beberapa perkara benar-benar hilang apabila ia terlepas.
Sebenarnya, saya rasa salah satu cara paling mudah untuk melakukan transformasi ialah melibatkan diri secara langsung dalam kerja berkaitan komputer Cara terpantas untuk meningkatkan permintaan adalah dengan menyelesaikan masalah arah pembelajaran dan masa yang saya nyatakan di atas. Walau bagaimanapun, jika terdapat masalah prestasi substandard disebabkan ini, berpura-pura saya tidak menyebutnya.
7. Mengenai NERF
NERF membuat gelombang dalam bidang pemanduan autonomi bersama-sama dengan perkataan panas yang muncul seperti "gelung tertutup data", "model besar" dan "hujung ke hujung". Dalam beberapa tahun sahaja, NERF bukan lagi pemaparan jilid MLP+yang mudah seperti ketika ia mula diperkenalkan. Terdapat pelbagai pembawa untuk menyimpan maklumat spatial: jadual cincang, grid voxel, fungsi Gaussian berbilang dimensi... Kaedah pengimejan baharu juga. muncul tanpa henti: U-net , CNN, rasterization... arah pemanduan autonomi hanyalah cabang aplikasi kecil NERF.
Apabila NERF digunakan pada simulasi pemanduan autonomi, ia akan menghadapi masalah berikut terutamanya:
Kaedah pengumpulan data pemanduan autonomi menyebabkan skop adegan menjadi "tidak tertutup": adegan luar akan mengandungi sejumlah besar pandangan jauh , yang merupakan masalah untuk penyimpanan maklumat spatial NERF. Adegan pemanduan autonomi mengandungi sejumlah besar objek dinamik, dan NERF perlu dapat mengendalikan pemisahan objek dinamik dan statik (atau model latar depan dan latar belakang); umumnya tidak mempunyai keupayaan pemindahan, dan setiap adegan mungkin perlu melatih model NERF yang berasingan, dan Latihan NERF masih agak perlahan, jadi masih terdapat masalah dalam aplikasi berskala besar NERF pada data pemanduan autonomi.
Walau bagaimanapun, saya masih menantikan dan percaya bahawa NERF akan membawa pembangunan yang mengganggu kepada simulasi pemanduan autonomi, akhirnya menghapuskan jurang domain dalam algoritma persepsi simulasi, dan juga melakukan lebih banyak lagi. Berdasarkan maklumat yang saya pelajari, NERF sekurang-kurangnya akan membawa kejayaan berikut:
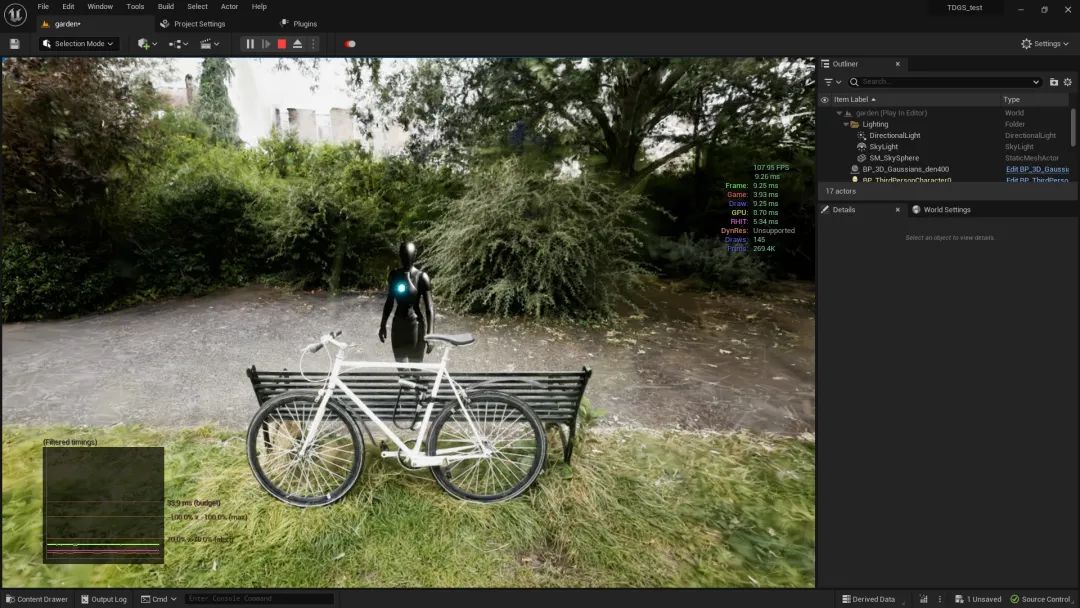
Keupayaan sintesis imej perspektif baharu NERF boleh meningkatkan set data latihan algoritma persepsi: ia boleh menjana parameter dalaman sensor baharu (bersamaan dengan menukar konfigurasi sensor) , Gambar luaran, awan titik lidar dan data lain di bawah parameter (trajektori kenderaan sendiri yang diubah suai) boleh menyediakan lebih banyak data latihan untuk algoritma persepsi Dalam hal ini, anda boleh merujuk kepada penyelidikan seperti StreetSurf dan UniSim. Apabila objek dinamik boleh diedit, pada masa hadapan NERF boleh menjana situasi ekstrem yang disasarkan dan senario situasi rawak untuk menambah kelemahan ujian pemacu mudah dan WorldSim. Jika NERF secara berkesan dapat menyelesaikan pembinaan semula latihan dan pemaparan masa nyata adegan peringkat bandar pada masa yang sama, maka NERF boleh digunakan sepenuhnya sebagai platform untuk ujian simulasi dalam gelung XIL tanpa masalah mengesan jurang domain data, dan ia juga akan mempromosikan hujung-ke-hujung Pembangunan algoritma hujung-ke-hujung. Selain itu, model NERF malah boleh dimasukkan ke dalam enjin permainan sebagai pemalam (contohnya, pemalam UE untuk 3d Gaussian Splatting telah dikeluarkan), supaya pembinaan semula pemandangan jalanan NERF boleh dimasukkan ke dalam sistem WorldSim yang asal . Jika digabungkan dengan model besar dalam arah AIGC, NERF akan mempunyai lebih banyak kemungkinan dalam menghasilkan pemandangan baharu: pencahayaan, cuaca, rupa objek dan tingkah laku, dsb. akan dapat diedit sewenang-wenangnya.
Jadi sebagai jurutera simulasi, saya amat mengesyorkan agar rakan sekerja memberi perhatian yang teliti terhadap kemajuan NERF Walaupun projek penyelidikan NERF masih di peringkat awal, kemajuan pembelajaran mendalam semakin pantas dengan pecutan perkakasan.
8. Ditulis pada penghujung
Saya telah menulis begitu banyak pelbagai, dan saya masih mempunyai beberapa pemikiran pada akhirnya.
Apakah perangkap pembangunan simulasi? Perangkap teknikal tidak dibincangkan di sini, tetapi berikut adalah beberapa pemikiran keseluruhan. Itu adalah untuk berhati-hati sama ada anda terlalu terlibat dalam kerja yang tidak bermakna: melakukan projek yang serupa untuk orang yang berbeza tidak dikira, menyelesaikan setiap projek adalah berharga jika anda tidak menggunakan alat siap sedia dan perlu melakukan penyelidikan sendiri dalam jangka panjang, ia tidak akan menjadi masalah, adalah berharga untuk melepaskan diri daripada pergantungan pada alat tertentu yang kemudiannya terbukti tidak munasabah tidak boleh dikira, dan kegagalan R&D juga bernilai. Jadi apakah sebenarnya kerja "tidak bermakna" itu? Ini soal pendapat, dan saya tidak dapat merumuskannya dengan baik.
Dan apa yang boleh saya lakukan dari kedudukan ini? Jika anda mempunyai pemahaman yang mendalam tentang objek yang diukur di tempat kerja, anda boleh cuba beralih ke kedudukan pembangunan algoritma dalam arah tertentu anda juga boleh mempertimbangkan pembangunan simulasi robot dan dron.
Sudah semestinya robot mudah alih dan pemanduan autonomi adalah serupa. Industri dron sememangnya tidak sebesar industri automobil, tetapi ia sudah mempunyai tapak pendaratan, seperti pemeriksaan, fotografi udara, ukur dan pemetaan, dsb. UAV juga memerlukan algoritma kawalan automatik untuk mengelakkan halangan, perancangan laluan, dll. Penderia yang digunakan oleh UAV juga serupa dengan kenderaan tanpa pemandu Oleh itu, boleh dikatakan bahawa ujian simulasi mempunyai persamaan: UAV juga memerlukan penglihatan yang kaya input seperti imej dan awan titik radar memerlukan model dinamik yang lebih canggih dan sebagainya.
Pelajar yang berminat untuk mempelajari tentang simulasi robot dan dron boleh bermula dengan platform simulasi sumber terbuka Gazebo (https://classic.gazebosim.org/) Permintaannya untuk sumber pengkomputeran tidak setinggi Nvidia's Isaac.
Tahun ini merupakan tahun kesebelas sejak OSRF menjadi bebas daripada Willow Garage, dan sistem pengendalian robot ROS dan Gazebo mempunyai sejarah pembangunan lebih daripada 20 tahun. Gazebo telah berkembang secara beransur-ansur daripada alat penyelidikan saintifik kumpulan penyelidikan siswazah menjadi alat perisian simulasi bebas dengan 11 keluaran dan 7 keluaran pencucuhan generasi kedua hari ini.

Gazebo menyokong enjin fizik seperti ODE dan Bullet Ia menggunakan OGRE sebagai enjin rendering untuk mencipta persekitaran tiga dimensi dan mensimulasikan maklumat daripada pelbagai penderia seperti kamera dan lidar. daripada lengan robot kepada robot beroda , kepada robot humanoid. Lebih penting lagi, Gazebo secara semula jadi menyediakan sokongan komprehensif untuk algoritma di bawah platform ROS: lagipun, jika anda memuat turun dan memasang versi ROS penuh desktop, Gazebo disertakan bersamanya. Sudah tentu, sebagai perisian sumber terbuka, Gazebo hanya menyediakan titik permulaan fungsinya seimbang, tetapi ia kasar dan tidak cukup dalam dalam semua aspek. Tetapi sama seperti Taizu Changquan, Qiao Feng akan tetap berbeza apabila dia menggunakannya di Kampung Juxian.
Saya bersentuhan dengan Gazebo semasa di sekolah Kemudian, saya bekerja dalam simulasi robot dan menggunakan Gazebo sehingga saya beralih kepada pemanduan autonomi. Seolah-olah saya dan Gazebo adalah rakan sekelas Kami masih muda dan jahil ketika itu. Selepas bekerja, dia dan saya bertemu semula dan memutuskan untuk memperbaharui hubungan kami. Kami tidak dapat dipisahkan selama lebih daripada dua tahun Sekarang kami berusia lebih tiga puluh tahun, saya meninggalkan mesej kepadanya: Saya mahu mempunyai perkembangan yang lebih baik, jadi saya akan pergi dia... Sekarang saya hanya berkata satu perkara apabila saya mengucapkan selamat tinggal: Lama tidak berjumpa...

Pautan asal: https://mp.weixin.qq.com/s/_bOe_g3mqoobJUbFS3SNWg
Atas ialah kandungan terperinci Pandangan hebat simulasi pemanduan autonomi! Mari bercakap tentang industri simulasi pemanduan autonomi!. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!