
Rumah >Peranti teknologi >AI >Sambil memegang kain kasa dan menggenggam jarum, NVIDIA bekerjasama dengan banyak universiti untuk membangunkan robot pembedahan
Sambil memegang kain kasa dan menggenggam jarum, NVIDIA bekerjasama dengan banyak universiti untuk membangunkan robot pembedahan

- 王林asal
- 2024-06-09 13:23:16546semak imbas

Editor |. X
NVIDIA sedang bekerjasama dengan penyelidik akademik untuk mengkaji robot pembedahan.
NVIDIA bekerjasama dengan penyelidik dari Universiti Toronto, UC Berkeley, ETH Zurich, dan Institut Teknologi Georgia untuk membangunkan ORBIT-Surgical, rangka kerja simulasi untuk melatih robot yang meningkatkan kemahiran pasukan teknikal sambil mengurangkan beban kognisi pakar bedah. ORBIT-Surgical ialah rangka kerja simulasi berasaskan kecerdasan buatan yang mencapai simulasi pembedahan yang sangat realistik melalui persekitaran pembedahan maya dan sistem bimbingan pintar. Doktor boleh berinteraksi dengan sistem ini untuk mensimulasikan pelbagai situasi dan kerumitan pembedahan sebenar. Teknologi simulasi ini bukan sahaja membantu dengan latihan
" Diilhamkan oleh kursus latihan pembedahan laparoskopi (juga dikenali sebagai pembedahan invasif minima), ia menyokong lebih daripada sedozen operasi, seperti meraih objek kecil seperti jarum dan memindahkannya dari satu lengan ke tangan yang lain. lengan, dan letakkannya dengan ketepatan yang tinggi."
Rangka kerja berasaskan fizik dibina menggunakan NVIDIA Isaac Sim, platform simulasi untuk mereka bentuk, melatih dan menguji robot berasaskan AI.
Para penyelidik melatih algoritma pembelajaran pengukuhan dan pembelajaran tiruan pada GPU NVIDIA dan menggunakan NVIDIA Omniverse, platform untuk membangun dan menggunakan aplikasi 3D dan saluran paip lanjutan berdasarkan Penerangan Pemandangan Universal (OpenUSD), untuk mencapai pemaparan Fotorealistik fotorealisme.
ORBIT-Surgical akan dibentangkan di IEEE International Conference on Robotics and Automation (ICRA) 2024.


Dengan membangunkan pecutan simulator pembedahan yang memanfaatkan dan pecutan parallel GPU. pasukan dapat meningkatkan kelajuan pembelajaran robot dengan susunan magnitud berbanding rangka kerja pembedahan sedia ada. Mereka mendapati bahawa selepas latihan, kembar digital robotik itu boleh menyelesaikan tugas seperti memasukkan shunt dan mengangkat jarum jahitan dalam dua jam pada GPU NVIDIA RTX tunggal.
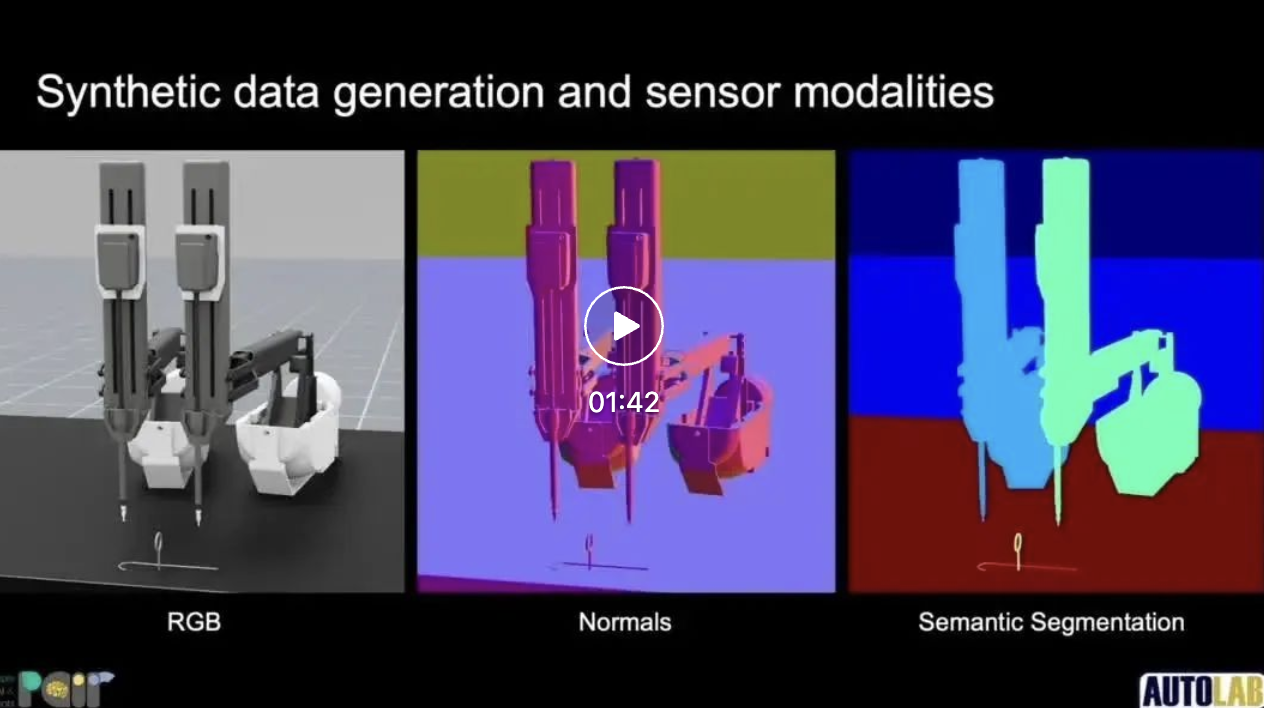
Dengan realisme visual yang didayakan oleh pemaparan Omniverse, ORBIT-Surgical juga membolehkan penyelidik menjana data sintetik ketelitian tinggi, yang membantu melatih model AI untuk melaksanakan tugas persepsi, seperti membahagikan alat pembedahan dalam video sebenar yang dirakam dalam bilik bedah.
Konsep bukti pasukan menunjukkan bahawa menggabungkan simulasi dan data dunia nyata dengan ketara meningkatkan ketepatan model kecerdasan buatan dalam membahagikan jarum pembedahan daripada imej, membantu mengurangkan keperluan untuk set data dunia sebenar yang besar dan mahal apabila melatih model sedemikian keperluan.
Kandungan rujukan: https://blogs.nvidia.com/blog/orbit-surgical-robotics-research-icra/
Atas ialah kandungan terperinci Sambil memegang kain kasa dan menggenggam jarum, NVIDIA bekerjasama dengan banyak universiti untuk membangunkan robot pembedahan. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Peraturan baharu untuk bulan Oktober ada di sini! Melibatkan papan tanda lalu lintas jalan baharu, industri kecerdasan buatan, dsb.
- Artikel panjang 10,000 perkataan丨Menyahbina rantaian industri keselamatan AI, penyelesaian dan peluang keusahawanan
- Robot humanoid tujuan am domestik akan dikeluarkan, dan industri akan mempercepatkan kejayaan
- Arah penggunaan bahasa Go dalam industri perubatan pintar
- Ahli CPPCC Daerah Xuhui menganjurkan aktiviti pemeriksaan intensif dan memberi perhatian kepada pembangunan industri kecerdasan buatan