
Rumah >Peranti teknologi >AI >Yang terbaru dari University of California! CarDreamer: Platform sumber terbuka yang komprehensif dan fleksibel untuk ujian algoritma pemanduan autonomi
Yang terbaru dari University of California! CarDreamer: Platform sumber terbuka yang komprehensif dan fleksibel untuk ujian algoritma pemanduan autonomi

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBasal
- 2024-06-08 16:57:521231semak imbas
Ditulis di atas & pemahaman peribadi pengarang
Untuk menavigasi dengan selamat dalam senario dunia sebenar yang kompleks, kenderaan autonomi mesti dapat menyesuaikan diri dengan pelbagai keadaan jalan raya dan meramalkan peristiwa masa depan. Pembelajaran pengukuhan (RL) berdasarkan model dunia telah muncul sebagai pendekatan yang menjanjikan untuk mencapai matlamat ini dengan mempelajari dan meramalkan dinamik kompleks pelbagai persekitaran. Walau bagaimanapun, platform yang boleh diakses untuk melatih dan menguji algoritma sedemikian dalam persekitaran pemanduan yang kompleks tidak wujud pada masa ini. Untuk mengisi jurang ini, CarDreamer diperkenalkan di sini, platform pembelajaran sumber terbuka pertama yang direka khusus untuk membangun dan menilai algoritma pemanduan autonomi berdasarkan model dunia. Ia mengandungi tiga komponen utama:
1%) Tulang Belakang Model Dunia (WM): CarDreamer menyepadukan beberapa model dunia yang paling maju untuk memudahkan penghasilan semula algoritma RL. Tulang belakang dipisahkan daripada bahagian lain dan berkomunikasi menggunakan antara muka Gim standard supaya pengguna boleh menyepadukan dan menguji algoritma mereka sendiri dengan mudah. Matlamat utama CarDreamer adalah untuk menyediakan platform yang fleksibel dan berskala yang membolehkan para penyelidik dan pembangun mengulang dan menguji pelbagai algoritma pembelajaran pengukuhan dengan cepat. Platform ini berdasarkan idea teras WM, yang membahagikan model dunia kepada dua komponen utama: persepsi dan perancangan. Komponen persepsi bertanggungjawab untuk mengambil input mentah daripada persekitaran dan menukarnya kepada
CarDreamer menyediakan set tugas pemanduan yang sangat boleh dikonfigurasikan (2%) Tugas terbina dalam: CarDreamer menyediakan set tugas pemanduan yang sangat boleh dikonfigurasikan yang Serasi dengan Antara muka gim dan dilengkapi dengan fungsi ganjaran yang dioptimumkan secara empirik.
CarDreamer ialah kit pembangunan misi yang fleksibel untuk memudahkan penciptaan misi pemanduan. Suite memudahkan untuk menentukan aliran trafik dan laluan kenderaan serta mengumpul data simulasi secara automatik. Pelayan visualisasi membolehkan pengguna menjejaki ejen masa nyata memandu video dan metrik prestasi melalui penyemak imbas. Selain itu, CarDreamer menjalankan kajian kekayaan dan fleksibiliti untuk menilai prestasi dan potensi WM dalam pemanduan autonomi. Disebabkan oleh kefungsian dan fleksibiliti CarDreamer yang kaya, kesan mod pemerhatian, kebolehcerapan dan perkongsian niat kenderaan terhadap keselamatan dan kecekapan AV juga dikaji secara sistematik.
Latar belakang pembangunan padang
Sistem mobiliti masa hadapan akan memainkan peranan teras dalam kenderaan autonomi, dengan banyak faedah yang menjanjikan seperti keselamatan dan kecekapan. Dalam beberapa tahun kebelakangan ini, pembangunan kenderaan autonomi telah membuat pencapaian yang hebat. Di Amerika Syarikat sahaja, kereta pandu sendiri telah merakam berjuta-juta batu di jalan awam. Walau bagaimanapun, mencapai kenderaan autonomi yang teguh yang mampu mengemudi senario dunia sebenar yang kompleks dan pelbagai kekal sebagai sempadan yang mencabar. Mengikut pengiraan oleh Pentadbiran Lebuhraya Persekutuan Jabatan Pengangkutan A.S., kereta pandu sendiri mempunyai kadar kemalangan kira-kira dua kali lebih tinggi daripada kenderaan konvensional. Namun, apabila teknologi terus berkembang, kadar perlanggaran untuk kereta pandu sendiri dijangka meningkat dengan ketara. Untuk mencapai keselamatan yang lebih tinggi, kenderaan autonomi perlu mempunyai persepsi yang lebih maju dan keupayaan membuat keputusan. Dengan memanfaatkan teknologi penderia termaju dan algoritma pembelajaran mesin, kereta pandu sendiri boleh mengenal pasti dan meramalkan gelagat halangan dan kenderaan lain di persekitaran sekelilingnya dengan lebih tepat. Di samping itu, kenderaan autonomi boleh meningkatkan kecekapan aliran trafik dengan menyelaraskan dengan pihak berkuasa trafik. Melalui sambungan dengan lampu isyarat dan kemudahan trafik lain, kereta pandu sendiri boleh melaraskan kelajuan dan laluan dalam masa nyata, sekali gus mengurangkan trafik
Kebolehpercayaan kereta pandu sendiri secara langsung menentukan keupayaan generalisasi sistem pandu sendiri dalam senario yang tidak dapat diramalkan. Model Dunia (WM), dengan keupayaan generalisasi yang sangat baik, menyediakan penyelesaian yang menjanjikan dengan mempelajari dinamik persekitaran yang kompleks dan meramalkan senario masa depan. Khususnya, WM mempelajari laten padat dan mengekod unsur-unsur penting dan dinamik persekitaran secara dinamik. Perwakilan yang dipelajari ini menyumbang kepada generalisasi yang lebih baik, membolehkan WM meramalkan dalam senario di luar sampel latihannya. Secara dalaman, WM mengandungi komponen yang meniru persepsi manusia dan membuat keputusan, seperti model visual dan model memori. Sebenarnya, sebab mengapa manusia dapat mengambil tindakan yang sewajarnya apabila menghadapi kejadian yang tidak diketahui atau tidak kelihatan adalah kerana model dalaman dunia manusia. Dengan mensimulasikan proses kognitif yang serupa dengan kecerdasan manusia, algoritma pembelajaran tetulang (RL) berasaskan WM telah menunjukkan prestasi terkini dalam bidang seperti permainan Atari dan Minecraft. Walau bagaimanapun, aplikasi WM dalam pemanduan autonomi kekal sebagai kawasan yang menarik, sebahagiannya disebabkan oleh kekurangan platform yang mudah digunakan untuk melatih dan menguji algoritma RL tersebut. Pembangunan platform pembelajaran pemanduan autonomi berdasarkan WM akan sangat bermanfaat untuk penyelidikan dalam bidang ini.
Jadi, didorong oleh faktor-faktor ini, kami melancarkan CarDreamer. Ini adalah platform pembelajaran sumber terbuka pertama yang direka khusus untuk pemanduan autonomi berasaskan WM. CarDreamer memudahkan pembangunan pantas dan penilaian algoritma, membolehkan pengguna menguji algoritma mereka pada tugas yang disediakan atau melaksanakan tugas tersuai dengan cepat melalui kit pembangunan yang komprehensif. Tiga sumbangan utama CarDreamer termasuk: 1. Pembangunan dan penilaian pantas: CarDreamer menyediakan satu set alat berkuasa untuk pembangunan dan penilaian algoritma pantas. Pengguna boleh memanfaatkan alatan ini untuk menguji algoritma mereka, menjalankan eksperimen pemanduan autonomi pada tugasan yang disediakan dan menjalankan penilaian prestasi. 2. Tugas tersuai: CarDreamer menyediakan kit pembangunan komprehensif untuk membolehkan pengguna melaksanakan tugas tersuai dengan cepat. Ini membolehkan pengguna membangunkan algoritma pemanduan sendiri mereka sendiri berdasarkan keperluan khusus dan menguji serta mengesahkannya pada platform CarDreamer. 3. Sumbangan utama termasuk: CarDreamer juga menyediakan
- algoritma WM bersepadu untuk mencapai pembiakan. CarDreamer menyepadukan WM paling maju, termasuk DreamerV2, DreamerV3 dan Planning2Explore, dengan ketara mengurangkan masa yang diperlukan untuk menghasilkan semula prestasi algoritma sedia ada. Algoritma ini dipisahkan daripada CarDreamer yang lain dan berkomunikasi melalui antara muka Gim bersatu. Ini membolehkan algoritma baharu disepadukan dan diuji secara langsung tanpa kerja penyesuaian tambahan selagi ia menyokong antara muka Gim.
- Tugas terbina dalam yang sangat boleh dikonfigurasikan untuk ganjaran yang dioptimumkan. CarDreamer menawarkan satu set tugas pemanduan yang komprehensif seperti menukar lorong dan memotong. Tugasan ini membolehkan penyesuaian yang meluas dari segi kesukaran, kebolehmerhatian, mod pemerhatian dan komunikasi niat kenderaan. Mereka mendedahkan antara muka Gim yang sama untuk kemudahan penggunaan, dan fungsi ganjaran direka bentuk dengan teliti untuk mengoptimumkan kecekapan latihan.
- Kit Pembangunan Tugas dan Pelayan Visualisasi. Kit ini bukan sahaja memudahkan penciptaan tugas pemanduan tersuai dengan penjanaan dan kawalan trafik dipacu API, tetapi juga termasuk pemerhati modular untuk memudahkan pengumpulan dan konfigurasi data berbilang mod. Pelayan visualisasi membolehkan paparan masa nyata ejen memandu video dan statistik, mempercepatkan kejuruteraan ganjaran dan pembangunan algoritma melalui pelayar web, memberikan pandangan prestasi segera.
Pengenalan kepada rangka kerja lain
Berikut ialah pengenalan ringkas kepada dua asas CarDreamer, CARLA dan gim. CARLA ialah simulator berkesetiaan tinggi dan fleksibel serta antara muka standard untuk latihan dan penilaian pembelajaran pengukuhan. Gim ialah kit alat sumber terbuka untuk pembelajaran pengukuhan, menyediakan persekitaran dan algoritma yang kaya. CarDreamer menggunakan dua asas ini untuk latihan dan penilaian, dan menggunakan RL (pembelajaran pengukuhan) sebagai antara muka untuk latihan dan penilaian model.
CARLA ialah simulator sumber terbuka yang direka bentuk untuk mensimulasikan senario trafik dunia sebenar. CARLA berasaskan Unreal Engine, yang memberikan kesan fizikal yang realistik dan pemaparan berkualiti tinggi. CARLA menyediakan aset digital termasuk peta, bangunan, kenderaan dan pelbagai mercu tanda. Ia menyokong pelbagai sensor seperti kamera RGB, LiDAR dan RADAR. Pengguna boleh mencipta kenderaan atau pejalan kaki dan mempunyai kawalan penuh ke atas aksara ini. Ini sememangnya alat yang sangat serba boleh, tetapi kelemahan utamanya dalam aplikasi algoritma RL juga berpunca daripada keumumannya. Mendapatkan pengekstrakan BEV (pandangan mata burung) dan proses yang membosankan menghalang penggunaan pantasnya dalam melatih algoritma RL.
gim ialah antara muka standard yang ditakrifkan oleh OpenAI untuk menyeragamkan komunikasi antara ejen dan persekitaran. Bahagian teras antara muka ini terdiri daripada dua fungsi set semula() dan langkah(tindakan). Yang pertama memulakan persekitaran kepada keadaan permulaannya. Yang terakhir menerima input tindakan daripada ejen, mensimulasikan evolusi persekitaran, dan mengembalikan data pemerhatian, isyarat ganjaran, penunjuk penamatan dan beberapa maklumat tambahan. Dengan cara ini, algoritma RL boleh diuji dengan mudah dalam pelbagai persekitaran tanpa penalaan yang meluas, asalkan kedua-duanya menyokong antara muka gim. Terdapat banyak usaha untuk membangunkan pelbagai penanda aras gim seperti permainan Atari, suite DMC, dll. Di CARLA, algoritma RL berasaskan WM digunakan dalam bidang pemanduan autonomi, dan CarDreamer ialah platform yang menyediakan pelbagai tugas pemanduan bandar melalui antara muka gim untuk memudahkan latihan dan penilaian.
Struktur rangkaian CarDreamer
Seperti yang ditunjukkan dalam Rajah 1, CarDreamer mengandungi tiga komponen utama: tugas terbina dalam, kit pembangunan tugas dan tulang belakang model dunia. Kit pembangunan misi menyediakan pelbagai fungsi API, termasuk mencipta kenderaan, mengawal aliran trafik dan merancang laluan di CARLA. Modul pemerhatian secara automatik mengumpul data pemerhatian berbilang mod seperti data penderia dan BEV (pandangan mata burung), yang diuruskan oleh prosedur pemprosesan data bebas dan boleh disesuaikan. Data ini mempunyai dua tujuan: ia digunakan oleh pelayan visualisasi tugas dan latihan. Pelayan visualisasi memaparkan video pemanduan masa nyata dan maklum balas persekitaran melalui pelayan HTTP, dan disepadukan dengan lancar dengan algoritma model dunia melalui antara muka gim. Selepas menerima respons ejen sebagai tindakan, modul pemerhatian mengumpul data daripada pengendali data dalam bingkai seterusnya, sekali gus meneruskan kitaran operasi ini.

Pelbagai tugas realistik direka bentuk dengan teliti di sini, daripada kemahiran mudah seperti menjaga lorong dan belok kiri kepada cabaran yang lebih kompleks seperti perayauan rawak dalam keadaan jalan yang berbeza, termasuk persimpangan, bulatan dan aliran trafik yang berbeza. Tugasan ini sangat boleh dikonfigurasikan, menyediakan banyak pilihan yang menimbulkan persoalan asas dalam pemanduan autonomi.
Kebolehcerap dan Perkongsian Niat: Dalam pembelajaran pengukuhan, kebolehcerapan separa merupakan cabaran yang ketara, di mana maklumat keadaan yang tidak lengkap boleh meningkatkan kerumitan ruang input secara eksponen dengan memasukkan semua langkah sejarah. Untuk menangani kekurangan alatan dalam pemanduan autonomi yang disesuaikan dengan cabaran ini, kami menyediakan tiga tetapan kebolehmerhatian dalam CarDreamer: 1) Medan Pandangan (FOV) merangkumi hanya kenderaan dalam medan pandangan kamera. 2) Medan Pandangan Berkongsi (SFOV) membolehkan kenderaan berkomunikasi dengan kenderaan lain dalam bidang pandangan mereka sendiri dan mengumpul data FOV. 3) Kebolehmerhatian penuh (FULL) menganggap persekitaran lengkap dan maklumat trafik latar belakang. Selain itu, pengguna boleh mengawal sama ada kenderaan itu berkongsi niatnya dan dengan siapa ia dikongsi. Konfigurasi ini diselaraskan dengan soalan asas "mesej apa untuk disampaikan" dan "kepada siapa untuk berkomunikasi" . Mod Pemerhatian : Pengguna boleh mengkonfigurasi ruang cerapan untuk memasukkan pelbagai mod, daripada data penderia seperti kamera RGB dan LiDAR kepada data sintetik seperti BEV. Fleksibiliti ini menyokong pembangunan model hujung ke hujung yang mampu membuat keputusan terus daripada data sensor mentah berbilang mod atau menggunakan penderiaan BEV untuk perancangan. Kesukaran : Tetapan kesukaran mempengaruhi terutamanya kepadatan lalu lintas, menimbulkan cabaran mengelakkan perlanggaran yang ketara. Memandangkan peristiwa kritikal keselamatan untuk kenderaan autonomi jarang berlaku, mengesahkan keteguhan kenderaan autonomi sememangnya sukar kerana jarang berlaku peristiwa sedemikian. CarDreamer direka khusus untuk menilai secara menyeluruh keselamatan dan kecekapan dalam senario yang mensimulasikan peristiwa yang jarang berlaku tetapi kritikal ini.
Fungsi ganjaran. Setiap tugasan dalam CarDreamer dilengkapi dengan fungsi ganjaran yang dioptimumkan, dan percubaan menunjukkan bahawa ini boleh membolehkan DreamerV3 berjaya menavigasi ke titik mercu tanda dalam hanya 10,000 langkah latihan (lihat Bahagian 5 untuk butiran). Terutama, penemuan empirikal kami menunjukkan bahawa ejen ganjaran berdasarkan halaju atau perubahan kedudukan tambahan membawa kepada prestasi yang lebih baik daripada ganjaran berdasarkan kedudukan mutlak. Ini kerana apabila ganjaran berdasarkan kedudukan semata-mata, ejen boleh mengeksploitasi fungsi ganjaran dengan membuat pergerakan awal yang kecil dan kemudian kekal tidak bergerak, kerana sebarang pergerakan selanjutnya boleh mengakibatkan penalti perlanggaran. Dalam amalan, kami memerhatikan tingkah laku suboptimum ini, di mana dasar yang dipelajari menumpu kepada penyelesaian optimum setempat, mengelakkan perlanggaran dengan kekal tidak bergerak. Sebaliknya, berdasarkan ganjaran pada kelajuan memaksa ejen mengekalkan gerakan berterusan untuk mengumpul ganjaran, dengan itu mengurangkan risiko penumpuan pramatang kepada polisi pegun yang tidak diingini. Reka bentuk ganjaran mempertimbangkan dengan teliti keperluan utama tugas pemanduan, seperti kelancaran trajektori, yang sering diabaikan dalam algoritma pembelajaran tetulang tradisional. Biasanya, algoritma ini memasukkan istilah entropi dalam fungsi kerugian atau anggaran nilainya untuk menggalakkan penerokaan dan mencegah penumpuan pramatang. Walau bagaimanapun, dalam konteks pemanduan autonomi, istilah entropi ini boleh memberi insentif kepada kenderaan untuk mengikuti trajektori zigzag, kerana gerakan tidak menentu tersebut menghasilkan ganjaran entropi yang lebih tinggi berbanding dengan laluan yang lebih lancar, walaupun kedua-dua trajektori mencapai kemajuan yang sama mungkin pada matlamat. . Untuk mengatasi kesan ini, istilah penalti yang direka khas diperkenalkan di sini untuk menyekat gerakan berserenjang dengan arah sasaran. Oleh itu, kami membangunkan fungsi ganjaran yang mengimbangi kemajuan matlamat dan kelancaran trajektori secara berkesan, dengan struktur berikut:

Antara Muka dan Penggunaan: Semua tugas terbina dalam dalam CarDreamer menggunakan antara muka gim bersatu, menjadikan algoritma pembelajaran Pengukuhan boleh dilatih dan diuji secara langsung tanpa pelarasan tambahan. Sebagai tambahan kepada penggunaan luar biasa, CarDreamer menyokong pelbagai algoritma, termasuk algoritma pembelajaran kursus yang mengeksploitasi perkembangan secara berperingkat daripada tugasan yang mudah kepada yang kompleks dan algoritma pembelajaran berterusan, yang direka untuk menangani masalah pelupaan bencana apabila belajar tugasan baru. Selain itu, untuk pembelajaran meniru, CarDreamer memudahkan proses mengumpul data pemerhatian dalam simulator. Walaupun pada asalnya direka untuk algoritma pembelajaran tetulang berasaskan WM, antara muka gim membolehkan penggunaannya secara meluas dalam pelbagai strategi algoritma.
1) Kit Pembangunan Misi
Untuk pengguna yang memerlukan misi tersuai, CarDreamer menyediakan kit pembangunan misi yang sangat modular. Suite ini boleh memenuhi pelbagai keperluan pengguna dengan tahap keperluan penyesuaian yang berbeza. Modul awal ialah "Pengurus Dunia", yang memenuhi keperluan asas seperti menukar pemandangan pemanduan melalui peta, laluan, lokasi bertelur atau aliran trafik latar belakang yang berbeza. Pengurus dunia bertanggungjawab mengurus "pelakon", istilah yang dipinjam daripada CARLA yang merangkumi semua entiti seperti kenderaan, pejalan kaki, lampu isyarat dan penderia. Ia menyediakan panggilan API untuk melahirkan pelbagai pelakon, khususnya kenderaan di lokasi berbeza dengan pelan tindakan lalai atau tersuai. Kenderaan ini boleh dikawal oleh pengguna atau oleh Autopilot, algoritma pandu sendiri berdasarkan peraturan mudah. Apabila ditetapkan semula, ia secara telus memusnahkan dan melepaskan sumber. Modul kedua ialah "Pemerhati", yang secara automatik mengumpul data pemerhatian dalam pelbagai mod. Walaupun ia membolehkan pengguna mengakses corak pemerhatian yang dipratentukan dengan mudah tanpa interaksi manual, ia juga menyokong penyesuaian spesifikasi data yang meluas. Ini dicapai melalui satu siri pemproses data, masing-masing menyediakan data untuk mod tertentu, seperti pemproses kamera RGB dan pemproses BEV. Setiap pemproses data sangat modular dan mengurus keseluruhan kitaran hayat jenis data tertentu secara bebas. Pengguna boleh meningkatkan pemerhati dengan mendaftar pemproses data baharu yang sesuai dengan keperluan mereka.
Modul ketiga mengandungi perancang laluan yang dapat memenuhi keperluan laluan misi yang pelbagai. CarDreamer merangkumi beberapa perancang: perancang stokastik untuk perayauan penerokaan merentasi peta untuk mencipta titik laluan yang menghubungkan lokasi yang ditentukan pengguna dan perancang titik akhir tetap yang menggunakan Algoritma A* klasik menjana laluan dari lokasi semasa ke yang ditentukan; titik akhir. Untuk memenuhi keperluan penyesuaian tambahan, kelas asas juga disediakan dan pengguna boleh membangunkan perancang mereka sendiri dengan mengatasi kaedah init_route() dan extend_route() (yang mentakrifkan permulaan laluan dan sambungan untuk setiap langkah masa, masing-masing). Selain itu, suite ini termasuk pelayan visualisasi yang menyepadukan dengan lancar output Pemerhati dan statistik lain yang disuap semula daripada persekitaran dan memaparkannya melalui pelayan HTTP. Automasi ini memudahkan maklum balas pantas untuk menambah baik kejuruteraan ganjaran dan proses pembangunan algoritma tanpa usaha pengekodan tambahan.
2) World Model Backbone
Rangka kerja tulang belakang model dunia dalam CarDreamer menyepadukan dengan lancar kaedah paling maju termasuk DreamerV2, DreamerV3 dan Planning2Explore, dsb., sekali gus menggalakkan pengeluaran semula pantas model ini. Seni bina tulang belakang ini direka bentuk dengan teliti untuk memisahkan pelaksanaan model dunia daripada komponen khusus tugas, dengan itu meningkatkan modulariti dan kebolehskalaan. Komunikasi antara komponen ini diurus dengan cekap melalui antara muka gim standard, membolehkan penyesuaian yang meluas. Penyahgandingan ini membolehkan pengguna menggantikan model dunia lalai dengan mudah dengan pelaksanaan mereka sendiri, membolehkan prototaip pantas, penanda aras dan analisis perbandingan terhadap penanda aras yang telah ditetapkan. Oleh itu, CarDreamer menyediakan platform ujian komprehensif untuk algoritma berasaskan model dunia, memupuk ekosistem untuk penyelidikan dan pembangunan yang dipercepatkan dalam bidang ini. Platform ini menggalakkan pengguna untuk meneroka seni bina yang inovatif, fungsi kehilangan dan strategi latihan dalam rangka kerja penilaian yang konsisten dan piawai yang terdiri daripada tugas pemanduan yang pelbagai dan metrik prestasi.
Percubaan misi CarDreamer
Model DreamerV3 kecil (ditunjukkan dalam Rajah 4) yang mengandungi hanya 18 juta parameter digunakan sebagai tulang belakang model. Model DreamerV3 kecil ini mempunyai 32 pengganda CNN, 512 unit GRU dan MLP, dan MLP hanya mempunyai dua lapisan dalam RSSMnya. Overhed memori kecil ialah kira-kira 10GB, yang membolehkan kami melatih pada GPU NVIDIA 4090 tunggal semasa menjalankan simulator CARLA. Latih ejen pada setiap tugas.
Perubahan keluk ganjaran dengan langkah masa ditunjukkan dalam Rajah 2.

Tugas mudah dengan volum trafik rendah, seperti "Simple Right Turn" dan "Lane Merge", biasanya berkumpul dalam 50,000 langkah (~1 jam), manakala aliran trafik yang lebih padat dan agresif melibatkan aliran trafik yang lebih padat dan agresif perlu dielakkan Untuk tugas perlanggaran, ia mengambil kira-kira 150,000 hingga 200,000 langkah (kira-kira 3 hingga 4 jam) untuk menumpu. Dalam penilaian, kami menggunakan beberapa metrik untuk menilai dengan teliti prestasi ejen pemanduan autonomi yang melaksanakan tugas CarDreamer, seperti yang diperincikan dalam Jadual 1. Metrik ini termasuk:
• Kadar kejayaan: Metrik ini mengukur peratusan kenderaan ejen yang berjaya menyelesaikan misinya (mencapai destinasi atau menempuh jarak yang telah ditetapkan tanpa kemalangan atau menyimpang dari lorongnya).
• Jarak purata (meter): Mewakili purata jarak yang dilalui oleh kenderaan ejen merentasi semua episod sebelum episod tamat (sama ada dengan menyelesaikan tugasan atau disebabkan kegagalan, seperti perlanggaran atau tamat masa).
• Kadar perlanggaran (%): Kira peratusan episod di mana kenderaan ejen berlanggar.
• Kelajuan purata (m/s): Mengukur kelajuan purata yang dikekalkan oleh kenderaan ejen sepanjang misi. Metrik ini mencerminkan keupayaan kenderaan untuk mengimbangi kelajuan dan keselamatan, menunjukkan betapa cekap kenderaan itu boleh menavigasi persekitarannya.
• Jarak Titik Jalan: Metrik ini mengukur sisihan purata daripada titik laluan laluan yang dikehendaki. Ia menilai keupayaan kenderaan untuk mengikut laluan yang dirancang, mencerminkan ketepatan dan ketepatan navigasinya apabila mengikut trajektori tertentu.

1) Ramalan di bawah modaliti pemerhatian yang berbeza
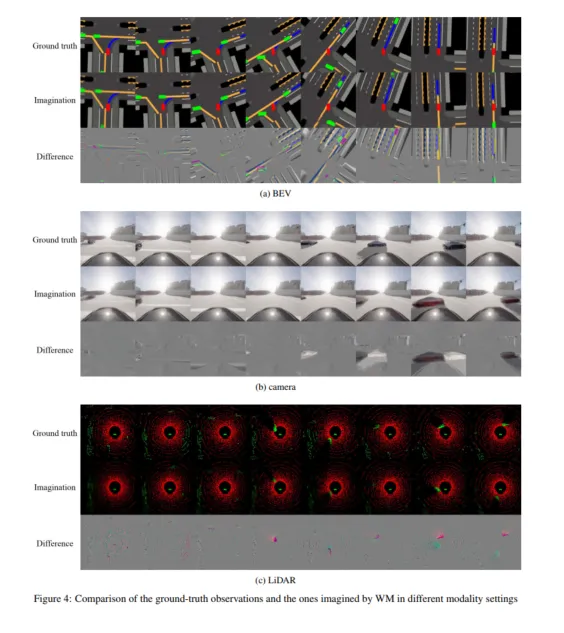
Kuasa imaginasi Model Dunia (WM) membolehkannya meramalkan senario masa depan dengan berkesan dan mengurus peristiwa yang berpotensi. Untuk menilai prestasi imaginasi WM di bawah modaliti pemerhatian yang berbeza, kami menjalankan eksperimen pada tugas "kesukaran belok kanan". Tiga modaliti berbeza telah dipilih: pandangan mata burung (BEV), kamera dan lidar (LiDAR). Bagi setiap modaliti, WM perlu membayangkan hasil pemerhatian beberapa langkah pada masa hadapan di bawah keadaan permulaan yang diberikan dan satu siri tindakan. Rajah 4 menunjukkan keputusan, membandingkan perbezaan antara imej sebenar dan imej yang dibayangkan dalam tiga modaliti. Baris pertama menunjukkan imej pemerhatian sebenar, baris kedua adalah hasil imaginasi WM, dan baris ketiga adalah perbezaan antara mereka. Kami memilih bingkai yang paling banyak 64 langkah masa dalam julat khayalan. Penemuan ini mencadangkan bahawa, walaupun modaliti berbeza, WM masih cemerlang dalam meramal masa depan dengan tepat. Dalam eksperimen BEV (a), WM meramalkan dengan tepat kedudukan dan trajektori kenderaan yang bergerak lurus dan membelok ke kanan, serta putaran dan terjemahan BEV berbanding kenderaan ego. Begitu juga, dalam tetapan kamera dan LiDAR, WM juga berjaya meramalkan kenderaan yang bergerak di hadapan kenderaan sendiri.

2) Faedah Komunikasi Kereta-ke-Kereta
Salah satu ciri unik CarDreamer ialah keupayaannya untuk menyesuaikan tahap komunikasi antara kenderaan dengan mudah. Kenderaan boleh berkongsi pandangan medan pandangan (FOV), membolehkan kebolehmerhatian yang berbeza. Selain itu, mereka juga boleh berkongsi niat (diwakili oleh titik laluan yang dirancang kenderaan) untuk perancangan yang lebih baik. Kami mengeksploitasi ciri ini untuk menilai kesan komunikasi. Pada satu ejen, ia telah dilatih dan diuji di bawah tetapan berbeza bagi tugasan "belok kanan sukar", iaitu kebolehmerhatian yang berbeza dan sama ada niat kenderaan lain boleh diakses. Tugas Hard Right Turn amat sesuai untuk menguji kebolehmerhatian dan komunikasi niat kerana trafik yang padat dan potensi perlanggaran yang kerap dari kenderaan di luar medan pandangan. Keluk ganjaran ditunjukkan dalam Rajah 5, dan beberapa penunjuk prestasi ditunjukkan dalam Jadual 2. Ambil perhatian bahawa dalam fungsi ganjaran kami, kejayaan melaksanakan belok kanan secara kasar diwakili oleh ganjaran lebih daripada 250. Keputusan menunjukkan bahawa pemerhatian yang terhad atau kekurangan perkongsian niat menghalang ejen daripada menyelesaikan tugas. Imej sampel seragam dari satu plot dalam Rajah 6 memberikan penjelasan yang baik: ejen mengamalkan strategi konservatif dan suboptimum, ia berhenti di persimpangan untuk mengelakkan perlanggaran. Sebagai contoh, dalam tiga baris pertama Rajah 6, ejen berhenti bergerak sebelum bergabung ke dalam trafik. Sebaliknya, maklumat lengkap membolehkan kenderaan ego berjaya melakukan pusingan kanan.

Atas ialah kandungan terperinci Yang terbaru dari University of California! CarDreamer: Platform sumber terbuka yang komprehensif dan fleksibel untuk ujian algoritma pemanduan autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!