



작성 전 글 및 저자의 개인적인 이해
본 토론서에서 중점적으로 다루는 주요 이슈는 자율주행 과정에서 3D 타겟 탐지 기술을 적용하는 것입니다. 환경 비전 카메라 기술의 개발은 3D 객체 감지를 위한 고해상도 의미 정보를 제공하지만, 이 방법은 깊이 정보를 정확하게 캡처할 수 없고 악천후나 저조도 조건에서 성능이 저하되는 등의 문제로 인해 제한됩니다. 이러한 문제에 대응하여 서라운드 뷰 카메라와 경제적인 밀리미터파 레이더 센서를 결합한 새로운 다중 모드 3D 표적 탐지 방법인 RCBEVDet을 제안했습니다. 이 방법은 여러 센서의 정보를 종합적으로 활용하여 더 풍부한 의미 정보를 제공하고 악천후나 저조도 조건에서 성능 저하와 같은 문제에 대한 솔루션을 제공합니다. 이러한 문제에 대응하여 서라운드 뷰 카메라와 경제적인 밀리미터파 레이더 센서를 결합한 새로운 다중 모드 3D 표적 탐지 방법인 RCBEVDet을 제안했습니다. RCBEVDet은 다중 모드 센서의 정보를 종합적으로 사용하여 고해상도 의미 정보를 제공하고 악천후나 저조도 조건에서 우수한 성능을 발휘할 수 있습니다. 자동
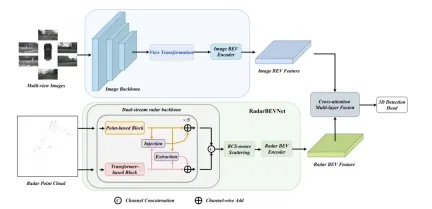
RCBEVDet을 개선하기 위한 이 방법의 핵심은 RadarBEVNet과 CAMF(Cross-Attention+Multi-layer Fusion Module)라는 두 가지 핵심 설계에 있습니다. RadarBEVNet은 레이더 기능을 효율적으로 추출하도록 설계되었으며 듀얼 스트림 레이더 백본 네트워크 RCS(Radar Cross Section) 인식 BEV(Bird's Eye View) 인코더를 포함합니다. 이러한 설계는 포인트 클라우드 기반 및 변환기 기반 인코더를 사용하여 레이더 포인트를 처리하고, 레이더 포인트 기능을 대화식으로 업데이트하며, 레이더 관련 RCS 특성을 대상 크기의 사전 정보로 사용하여 BEV 공간의 포인트 기능 분포를 최적화합니다. CAMF 모듈은 다중 모드 교차 주의 메커니즘을 통해 레이더 지점의 방위각 오류 문제를 해결하여 레이더와 카메라의 BEV 기능 맵을 동적으로 정렬하고 채널 및 공간 융합을 통해 다중 모드 기능의 적응형 융합을 달성합니다. 구현에서는 레이더 포인트 기능을 대화형으로 업데이트하고 레이더별 RCS 특성을 대상 크기의 사전 정보로 사용하여 BEV 공간의 포인트 기능 분포를 최적화합니다. CAMF 모듈은 다중 모드 교차 주의 메커니즘을 통해 레이더 지점의 방위각 오류 문제를 해결하여 레이더와 카메라의 BEV 기능 맵을 동적으로 정렬하고 채널 및 공간 융합을 통해 다중 모드 기능의 적응형 융합을 달성합니다.

논문에서 제안한 새로운 방법은 다음과 같은 점을 통해 기존의 문제점을 해결합니다.
- 효율적인 레이더 특징 추출기: 듀얼 스트림 레이더 백본 및 RCS 감지를 통한 BEV 인코더 설계, 특히 레이더의 특징 레이더 데이터를 처리하기 위해 LiDAR용으로 설계된 인코더를 사용할 때의 단점을 해결하기 위해 데이터가 최적화되었습니다.
- 강력한 레이더-카메라 기능 융합 모듈: 변형된 교차 주의 메커니즘을 사용하여 서라운드 이미지와 레이더 입력 간의 공간적 오정렬 문제를 효과적으로 처리하고 융합 효과를 향상시킵니다.
논문의 주요 기여는 다음과 같습니다.
- 고정밀, 고효율 및 강력한 견고성 3D 표적 탐지를 달성하는 새로운 레이더-카메라 다중 모드 3D 표적 탐지기 RCBEVDet을 제안합니다.
- 듀얼 스트림 레이더 백본 및 RCS 인식 BEV 인코더를 통해 특징 추출의 효율성과 정확성을 향상시키는 레이더 데이터를 위한 효율적인 특징 추출기인 RadarBEVNet을 설계했습니다.
- Cross-Attention Multi-layer Fusion 모듈은 변형된 Cross-Attention 메커니즘을 통해 레이더와 카메라 기능의 정확한 정렬과 효율적인 융합을 달성하기 위해 도입되었습니다.
- NuScenes 및 VoD 데이터 세트에서 레이더-카메라 다중 모드 3D 객체 감지 분야에서 새로운 최첨단 성능을 달성하는 동시에 정확성과 속도 간의 최상의 균형을 달성하고 센서 오류 시나리오 견고성에서 우수한 성능을 입증했습니다.
RCBEVDet에 대한 자세한 설명
RadarBEVNet
RadarBEVNet은 효과적인 광산 차량 BEV(새 모양 지도) 특징 추출을 위해 본 논문에서 제안하는 네트워크 아키텍처로 주로 두 가지 핵심 구성 요소를 포함합니다. 스트림 레이더 백본 네트워크 및 RCS(레이더 단면) 인식 BEV 인코더. 듀얼 스트림 레이더 백본 네트워크는 다중 채널 레이더 데이터에서 풍부한 기능 표현을 추출하는 데 사용됩니다. 심층 컨벌루션 신경망(CNN)을 기반으로 구축되어 특징 추출 및 차원 축소 작업을 위해 중첩된 컨볼루션 및 풀링 레이어를 번갈아 사용하여 듀얼 스트림 레이더 백본을 점진적으로 얻습니다.
백본 네트워크는 포인트 기반 백본과 변환기로 구성됩니다. 기반 백본. 포인트 기반 백본 네트워크는 MLP(다층 퍼셉트론) 및 최대 풀링 작업을 통해 레이더 기능을 학습하며 이 프로세스는 다음 공식으로 단순화될 수 있습니다.
여기서는 MLP를 통해 기능 차원을 늘린 후 최대값인 레이더 포인트 기능을 나타냅니다. 풀링 작업은 전역 정보를 추출하고 이를 고차원 특징과 연결합니다. 변환기는 간섭 블록을 기반으로 하며 레이더 지점 간의 거리 정보를 고려하여 모델의 인접 정보 수집 기능을 최적화하고 모델의 수렴을 촉진하는 DMSA(거리 변조 주의 메커니즘)를 도입합니다. DMSA 메커니즘의 self-attention은 다음과 같이 표현될 수 있습니다:RCS 인식 BEV 인코더
기존 레이더 BEV 인코더로 인해 발생하는 BEV 기능 희소성 문제를 해결하기 위해 RCS 인식 BEV 인코더가 제안됩니다. 목표 크기에 대한 사전 정보로 RCS를 사용하고 레이더 포인트 특징을 단일 픽셀이 아닌 BEV 공간의 여러 픽셀에 확산시켜 BEV 특징의 밀도를 높입니다. 이 프로세스는 다음 공식을 통해 구현됩니다.
여기에는 RCS 기반의 Gaussian BEV 가중치 맵이 있으며, 이는 모든 레이더 지점의 가중치 맵을 최대화하여 최적화됩니다. 마지막으로 RCS 확산을 통해 얻은 특징을 MLP로 연결하고 처리하여 최종 RCS 인식 BEV 특징을 얻습니다.
전반적으로 RadarBEVNet은 듀얼 스트림 레이더 백본 네트워크와 RCS 인식 BEV 인코더를 결합하여 레이더 데이터의 특징을 효율적으로 추출하고 RCS를 대상 크기의 우선순위로 사용하여 BEV 공간의 특징 분포를 최적화하여 제공합니다. 후속 다중 모드 융합의 기반은 강력한 기반을 제공합니다.

Cross-Attention Multi-layer Fusion Module
Cross-Attention Multi-layer Fusion Module(CAMF)은 특히 레이더 및 동적 정렬을 위한 다중 모드 기능의 동적 정렬 및 융합을 위한 고급 네트워크 구조입니다. 카메라 생성 BEV(Bird's Eye View) 기능의 융합 디자인. 이 모듈은 주로 변형 가능한 교차 주의 메커니즘(Deformable Cross-Attention)을 통해 레이더 포인트 클라우드의 방위각 오류로 인해 발생하는 형상 오정렬 문제를 해결합니다. 레이더 점의 작은 편차를 효과적으로 포착하고 표준 교차 주의를 줄입니다. 계산 복잡성.
CAMF는 변형된 교차 주의 메커니즘을 활용하여 카메라와 레이더의 BEV 기능을 정렬합니다. 카메라와 레이더에 대한 BEV 기능의 합이 주어지면 학습 가능한 위치 임베딩이 먼저 합산에 추가된 다음 키와 값으로 쿼리 및 참조 포인트로 변환됩니다. 다중 헤드 변형 교차 어텐션 계산은 다음과 같이 표현될 수 있습니다.
여기서 어텐션 헤드의 인덱스, 샘플링 키의 인덱스, 는 샘플링 키의 총 개수를 나타냅니다. 는 샘플링 오프셋을 나타내며 는 및 에 의해 계산된 주목 가중치입니다.
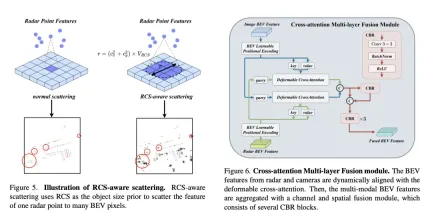
교차 주의를 통해 카메라와 레이더의 BEV 기능을 정렬한 후 CAMF는 채널 및 공간 융합 레이어를 사용하여 다중 모드 BEV 기능을 집계합니다. 구체적으로, 두 개의 BEV 특징을 먼저 연결한 다음 CBR(컨볼루션-배치 정규화-활성화 함수) 블록에 입력하고 잔여 연결을 통해 융합된 특징을 얻습니다. CBR 블록은 Convolutional Layer, Batch Normalization Layer, ReLU Activation Function으로 순차적으로 구성됩니다. 그 후 3개의 CBR 블록이 연속적으로 적용되어 다중 모드 기능을 더욱 융합합니다.
위 프로세스를 통해 CAMF는 레이더와 카메라 BEV 기능의 정확한 정렬과 효율적인 융합을 효과적으로 달성하여 3D 타겟 감지를 위한 풍부하고 정확한 기능 정보를 제공하여 감지 성능을 향상시킵니다.
관련 실험

RadarBEVNet은 VoD 검증 세트의 3D 타겟 탐지 결과 비교에서 카메라와 카메라를 융합하여 전체 주석 영역과 관심 영역에서 평균 정확도(mAP) 성능을 모두 달성했습니다. 레이더 데이터는 뛰어난 성능을 보여주었습니다. 구체적으로, RadarBEVNet은 주석이 표시된 전체 영역에 대해 자동차, 보행자, 자전거 이용자 감지에서 각각 40.63%, 38.86%, 70.48%의 AP 값을 달성하여 종합 mAP를 49.99%로 높였습니다. 관심 영역, 즉 차량과 가까운 주행 채널에서는 RadarBEVNet의 성능이 더욱 뛰어나 자동차, 보행자, 보행자 감지에서 AP 값 72.48%, 49.89%, 87.01%에 달한다. 종합 mAP는 69.80%에 도달했습니다.
이 결과는 몇 가지 핵심 사항을 드러냅니다. 첫째, RadarBEVNet은 카메라와 레이더 입력을 효과적으로 융합함으로써 두 센서의 상호 보완적인 이점을 최대한 활용하고 전반적인 감지 성능을 향상시킬 수 있습니다. PointPillar 및 RadarPillarNet과 같이 레이더만 사용하는 방법과 비교할 때 RadarBEVNet은 포괄적인 mAP에서 상당한 개선을 보였으며 이는 다중 모드 융합이 감지 정확도를 향상시키는 데 특히 중요하다는 것을 보여줍니다. 둘째, RadarBEVNet은 관심 영역에서 특히 뛰어난 성능을 발휘합니다. 이는 관심 영역의 목표가 일반적으로 실시간 운전 결정에 가장 큰 영향을 미치기 때문에 자율 주행 애플리케이션에 특히 중요합니다. 마지막으로, RadarBEVNet의 AP 값은 자동차 및 보행자 감지에서 일부 단일 모드 또는 기타 다중 모드 방법보다 약간 낮지만 RadarBEVNet은 자전거 타는 사람 감지 및 포괄적인 mAP 성능에서 전반적인 성능 이점을 보여줍니다. RadarBEVNet은 카메라와 레이더의 다중 모드 데이터를 융합하여 VoD 검증 세트에서 탁월한 성능을 달성하며, 특히 자율 주행에 중요한 관심 영역에서 강력한 감지 기능을 입증하여 3D 객체 감지 방법으로서의 효율성을 입증합니다.

이 절제 실험은 RadarBEVNet이 점차적으로 주요 구성 요소를 추가함에 따라 3D 물체 감지 성능이 지속적으로 향상되고 있음을 보여줍니다. 기본 모델 BEVDepth부터 시작하여 각 단계에 추가된 구성 요소는 NDS(검출 정확도 및 완전성을 반영하는 핵심 메트릭) 및 mAP(모델의 객체 감지 기능을 반영하는 평균 정밀도)를 크게 향상시킵니다.
- 시간 정보 추가: 시간 정보를 도입하여 NDS와 mAP가 각각 4.4% 포인트, 5.4% 포인트 향상되었습니다. 이는 시간 정보가 3D 객체 감지의 정확성과 견고성을 향상시키는 데 매우 효과적이라는 것을 보여줍니다. 아마도 시간 차원은 모델이 장면과 객체의 동적 특성을 더 잘 이해하는 데 도움이 되는 추가 동적 정보를 제공하기 때문일 것입니다.
- PointPillar+BEVFusion 추가(레이더와 카메라 융합 기반): 이 단계는 NDS와 mAP를 더욱 향상시켜 각각 1.7% 포인트와 1.8% 포인트 증가합니다. 이는 레이더와 카메라 데이터를 융합함으로써 모델이 단일 모달 데이터의 한계를 보완하여 보다 포괄적인 장면 이해를 얻을 수 있음을 보여줍니다.
- RadarBEVNet 소개: NDS와 mAP가 각각 2.1% 포인트와 3.0% 포인트 증가했습니다. 효율적인 레이더 특징 추출기인 RadarBEVNet은 레이더 데이터 처리를 최적화하고 특징의 품질과 효율성을 향상시키며, 이는 전반적인 탐지 성능을 향상시키는 데 중요합니다.
- CAMF(Cross Attention Multi-layer Fusion Module) 추가: 미세한 특징 정렬 및 융합을 통해 NDS가 0.7%포인트 증가하고, mAP는 45.6으로 소폭 향상되어 특징 융합에 효율성을 보여줍니다. 이 단계의 개선은 이전 단계만큼 중요하지는 않지만 다중 모드 융합 중 감지 성능을 향상시키는 데 있어 정확한 특징 정렬의 중요성이 여전히 입증되었습니다.
- 시간 감독 추가: 마지막으로 시간 감독 도입 후 NDS는 0.4% 포인트 소폭 증가한 56.8을 기록했고, mAP는 0.3% 포인트 소폭 감소한 45.3을 기록했습니다. 이는 비록 mAP에 대한 기여도가 특정 실험 설정이나 데이터 분포의 영향에 의해 약간 제한될 수 있지만 시간적 감독이 시간적 차원에서 모델의 성능을 더욱 향상시킬 수 있음을 보여줍니다.
전반적으로 이 일련의 절제 실험은 시간 정보 도입부터 복잡한 다중 모드 융합 전략에 이르기까지 모든 단계에서 RadarBEVNet의 각 주요 구성 요소가 3D 객체 감지 성능을 향상시키는 데 기여한다는 것을 명확하게 보여줍니다. 모델. 특히, 레이더와 카메라 데이터에 대한 정교한 처리 및 융합 전략은 복잡한 자율 주행 환경에서 다중 모드 데이터 처리의 중요성을 입증합니다.
논의
논문에서 제안된 RadarBEVNet 방법은 특히 복잡한 자율 주행 시나리오에서 카메라와 레이더의 다중 모드 데이터를 융합하여 3D 표적 탐지의 정확성과 견고성을 효과적으로 향상시킵니다. RadarBEVNet과 CAMF(Cross-Attention Multi-layer Fusion Module)를 도입함으로써 RadarBEVNet은 레이더 데이터의 특징 추출 프로세스를 최적화할 뿐만 아니라 레이더와 카메라 데이터 간의 정확한 특징 정렬 및 융합을 달성하여 단일 사용 문제를 극복합니다. 저조도 또는 악천후 조건에서 레이더 방위 오류 및 카메라 성능 저하와 같은 센서 데이터 제한.
장점 측면에서 RadarBEVNet의 주요 기여는 다중 모드 데이터 간의 보완 정보를 효과적으로 처리하고 활용하여 감지 정확도와 시스템 견고성을 향상시키는 능력입니다. RadarBEVNet의 도입으로 레이더 데이터 처리가 더욱 효율적으로 이루어지고 CAMF 모듈은 다양한 센서 데이터의 효과적인 융합을 보장하여 각각의 단점을 보완합니다. 또한 RadarBEVNet은 특히 자율주행에 중요한 관심 영역에서 실험을 통해 여러 데이터 세트에 대해 뛰어난 성능을 보여 실제 적용 시나리오에서 잠재력을 보여주었습니다.
단점 측면에서 RadarBEVNet은 다중 모드 3D 표적 탐지 분야에서 놀라운 결과를 얻었지만 그에 따라 구현의 복잡성도 증가했으며 더 많은 컴퓨팅 리소스와 처리 시간이 필요할 수 있으므로 특정 용도로 사용이 제한됩니다. 범위. 실시간 애플리케이션 시나리오에서의 배포. 또한 RadarBEVNet은 자전거 타는 사람 감지 및 전반적인 성능에서 우수한 성능을 발휘하지만 특정 범주(예: 자동차 및 보행자)에 대한 성능 개선의 여지는 여전히 남아 있으며, 이를 해결하려면 추가 알고리즘 최적화 또는 보다 효율적인 기능 융합 전략이 필요할 수 있습니다.
간단히 말하면 RadarBEVNet은 혁신적인 다중 모드 융합 전략을 통해 3D 객체 감지 분야에서 상당한 성능 이점을 입증했습니다. 더 높은 계산 복잡성과 특정 감지 범주에 대한 성능 개선의 여지와 같은 몇 가지 제한 사항이 있지만 자율 주행 시스템의 정확성과 견고성을 향상시키는 잠재력은 무시할 수 없습니다. 향후 작업은 실제 자율 주행 애플리케이션에서 RadarBEVNet의 광범위한 배포를 촉진하기 위해 알고리즘의 계산 효율성을 최적화하고 다양한 표적 탐지에 대한 성능을 더욱 향상시키는 데 중점을 둘 수 있습니다.
결론
이 논문에서는 카메라와 레이더 데이터를 융합하여 RadarBEVNet과 CAMF(Cross-Attention Multi-layer Fusion Module)를 소개하여 3D 타겟 탐지 분야, 특히 자율 주행의 핵심 분야에서 상당한 성능 향상을 보여줍니다. 뛰어난 성능 현장에서. 다중 모드 데이터 간의 보완 정보를 효과적으로 활용하여 감지 정확도와 시스템 견고성을 향상시킵니다. 높은 계산 복잡성과 일부 범주의 성능 개선 여지가 있음에도 불구하고 우리는 자율 주행 기술 개발을 촉진하는 데, 특히 자율 주행 시스템의 인식 기능을 향상시키는 데 큰 잠재력과 가치를 보여주었습니다. 향후 작업은 실시간 자율 주행 애플리케이션의 요구 사항에 더 잘 적응할 수 있도록 알고리즘 효율성을 최적화하고 감지 성능을 더욱 향상시키는 데 중점을 둘 수 있습니다.
위 내용은 RV 퓨전 성능이 놀랍습니다! RCBEVDet: 레이더에도 봄이 왔습니다, 최신 SOTA!의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 LLM에서 도구 호출Apr 14, 2025 am 11:28 AM
LLM에서 도구 호출Apr 14, 2025 am 11:28 AM대형 언어 모델 (LLM)은 인기가 높아졌으며, 도구 전달 기능은 단순한 텍스트 생성을 넘어 기능을 극적으로 확장했습니다. 이제 LLM은 동적 UI 생성 및 자율적 인 A와 같은 복잡한 자동화 작업을 처리 할 수 있습니다.
 ADHD 게임, 건강 도구 및 AI 챗봇이 글로벌 건강을 변화시키는 방법Apr 14, 2025 am 11:27 AM
ADHD 게임, 건강 도구 및 AI 챗봇이 글로벌 건강을 변화시키는 방법Apr 14, 2025 am 11:27 AM비디오 게임이 불안을 완화하거나 집중하거나 ADHD를 가진 어린이를 지원할 수 있습니까? 건강 관리 도전이 전 세계적으로 급증함에 따라, 특히 청소년들 사이에서 혁신가들은 비디오 게임 인 가능성이없는 도구로 전환하고 있습니다. 이제 세계 최대의 엔터테인먼트 인더스 중 하나입니다
 AI에 대한 UN 입력 : 우승자, 패자 및 기회Apr 14, 2025 am 11:25 AM
AI에 대한 UN 입력 : 우승자, 패자 및 기회Apr 14, 2025 am 11:25 AMUNCTAD의 사무 총장 인 Rebeca Grynspan은“역사는 기술 진보가 경제 성장을 유발하거나 공평한 소득 분배를 보장하거나 포용적인 인간 발전을 촉진하지는 않습니다.
 생성 AI를 통한 협상 기술 학습Apr 14, 2025 am 11:23 AM
생성 AI를 통한 협상 기술 학습Apr 14, 2025 am 11:23 AM쉽게 생성 AI를 협상 교사 및 스파링 파트너로 사용하십시오. 그것에 대해 이야기합시다. 혁신적인 AI 혁신에 대한이 분석은 AI의 최신 Forbes 열 범위의 일부입니다.
 Ted는 Openai, Google, 메타가 법정으로 공개됩니다.Apr 14, 2025 am 11:22 AM
Ted는 Openai, Google, 메타가 법정으로 공개됩니다.Apr 14, 2025 am 11:22 AM밴쿠버에서 개최 된 TED2025 컨퍼런스는 어제 4 월 11 일 36 번째 판을 마무리했습니다. Sam Altman, Eric Schmidt 및 Palmer Luckey를 포함한 60 개 이상의 국가에서 80 명의 스피커를 선보였습니다. 테드의 주제 인“인류를 다시 상상했다”는 재단사가 만들어졌다
 Joseph Stiglitz는 AI 독점권 속에서 임시 불평등을 경고합니다.Apr 14, 2025 am 11:21 AM
Joseph Stiglitz는 AI 독점권 속에서 임시 불평등을 경고합니다.Apr 14, 2025 am 11:21 AMJoseph Stiglitz는 2001 년에 유명한 경제학자이자 노벨 경제학상을 수상했습니다. Stiglitz는 AI가 기존의 불평등과 통합 된 권력을 몇몇 지배적 인 기업의 손에 악화시킬 수 있으며 궁극적으로 경제를 훼손 할 수 있다고 주장합니다.
 그래프 데이터베이스 란 무엇입니까?Apr 14, 2025 am 11:19 AM
그래프 데이터베이스 란 무엇입니까?Apr 14, 2025 am 11:19 AM그래프 데이터베이스 : 관계를 통한 데이터 관리 혁명 데이터가 확장되고 그 특성이 다양한 필드에서 발전함에 따라 그래프 데이터베이스는 상호 연결된 데이터를 관리하기위한 변환 솔루션으로 떠오르고 있습니다. 전통적인 것과는 달리
 LLM 라우팅 : 전략, 기술 및 파이썬 구현Apr 14, 2025 am 11:14 AM
LLM 라우팅 : 전략, 기술 및 파이썬 구현Apr 14, 2025 am 11:14 AM대형 언어 모델 (LLM) 라우팅 : 지능형 작업 분포를 통한 성능 최적화 LLM의 빠르게 진화하는 환경은 각각 독특한 강점과 약점을 가진 다양한 모델을 제시합니다. 일부는 Creative Content Gen에서 탁월합니다


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

VSCode Windows 64비트 다운로드
Microsoft에서 출시한 강력한 무료 IDE 편집기

드림위버 CS6
시각적 웹 개발 도구

WebStorm Mac 버전
유용한 JavaScript 개발 도구

안전한 시험 브라우저
안전한 시험 브라우저는 온라인 시험을 안전하게 치르기 위한 보안 브라우저 환경입니다. 이 소프트웨어는 모든 컴퓨터를 안전한 워크스테이션으로 바꿔줍니다. 이는 모든 유틸리티에 대한 액세스를 제어하고 학생들이 승인되지 않은 리소스를 사용하는 것을 방지합니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

