
굉장히 멋진! ! ! Tesla 엔드투엔드 시연 영상 분석

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB앞으로
- 2024-03-06 12:20:031278검색
한 사용자가 Tesla FSD v12의 동영상을 인터넷에 게시했고 누군가 이를 b 사이트로 옮겼습니다:
https://www.bilibili.com/video/BV1Z6421M797www.bilibili.com/video/BV1Z6421M797
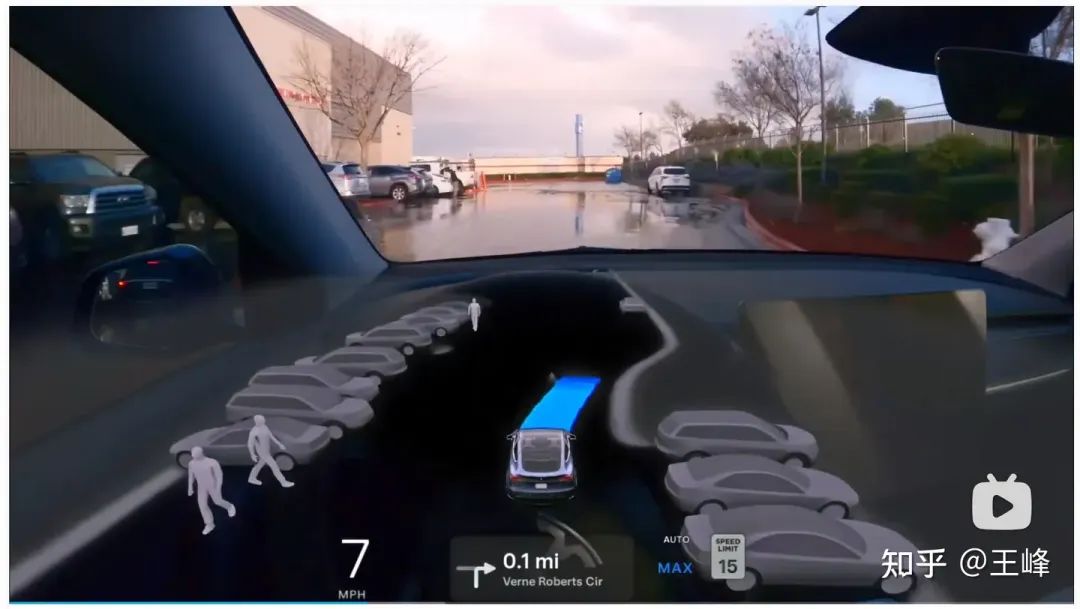
이번에는 그것은 순전히 시각적으로 복잡한 장면입니다. 비가 내리고 땅에 물이 있고 다양한 패턴이 물에 반사되어 이상한 시각적 효과를 생성할 수 있습니다. Tesla는 작년에 AI Day 행사를 열지 않았습니다. 경쟁사들이 종종 슬라이드를 도발했기 때문에 단순히 취소했습니다. 자세한 내용이 없는 경우 비디오를 시청하면 일부 엔드투엔드 기능을 엿볼 수 있습니다. 다음으로 몇 가지 흥미로운 점을 분석해 보겠습니다.
01:57, 차문이 열린 것을 실수로 감지하고 크게 우회했습니다:

여기는 큰 문제가 되지 않습니다. 왼쪽에 비교적 넓은 공간이 있으므로 상관 없습니다. 조금 더 돌아다니다 보면.
02:09, OCC를 잘못 감지하여 거의 정지했습니다.

보행자가 떠났으니 앞으로 나아갈 수 있습니다. 하지만 바닥에 물이 고여 있어 물체의 이미지가 반사되어 오감지로 이어질 수 있어 잠시 멈춰서 기다렸다가 이동했습니다.
04:40, 근거리 컷인 차량을 놓쳤습니다


왼쪽의 극근거리 후진 컷인 차량을 놓쳤으나 계획상 의도한 바는 없었던 것 같습니다 끝을 반영하는 시작 엔드 투 엔드의 주요 이점: 업스트림 오류의 결과가 반드시 잘못된 운전 행동으로 이어지는 것은 아닙니다. 나중에 더 유사한 예를 볼 것입니다.
05:37 OCC 오감지

이것도 지면에 쌓인 물에 의한 OCC일수도 있습니다. 이 결과를 끝까지 받아들이고 핸들을 좌우로, 때로는 왼쪽으로 돌렸습니다. 때로는 오른쪽에도 있습니다.
05:48, 좌우 근거리 OCC 오감지

좌우 아주 가까운 위치에서 OCC 오감지가 발생하고, 그래도 규정을 준수한다면 신고해야 할 수도 있습니다. 인수하려면 (결국 운전은 아님) 트랙에서) 여기서는이 두 OCC를 처음부터 끝까지 직접 무시하고 운전을 계속합니다.
06:57, 눈앞의 근거리에서 보행자 오인

정말 멋지네요. 보행자가 얼굴에 나타나요. 이때 모든 규칙 기반 제어는 확실히 브레이크 + 알람이 되지만, 끝은 엔드엔드 모델은 업스트림 결과를 인식하지 못하고 평소대로 계속 주행합니다.
14점 : 전용주차장에서 맴돌다가 나갈 수가 없었어요
이건 BEV의 감지거리가 부족해서 생긴 문제일 수도 있는데 오랫동안 출구를 못찾아서 그랬어요. 주차장에서 돌고 있습니다. .
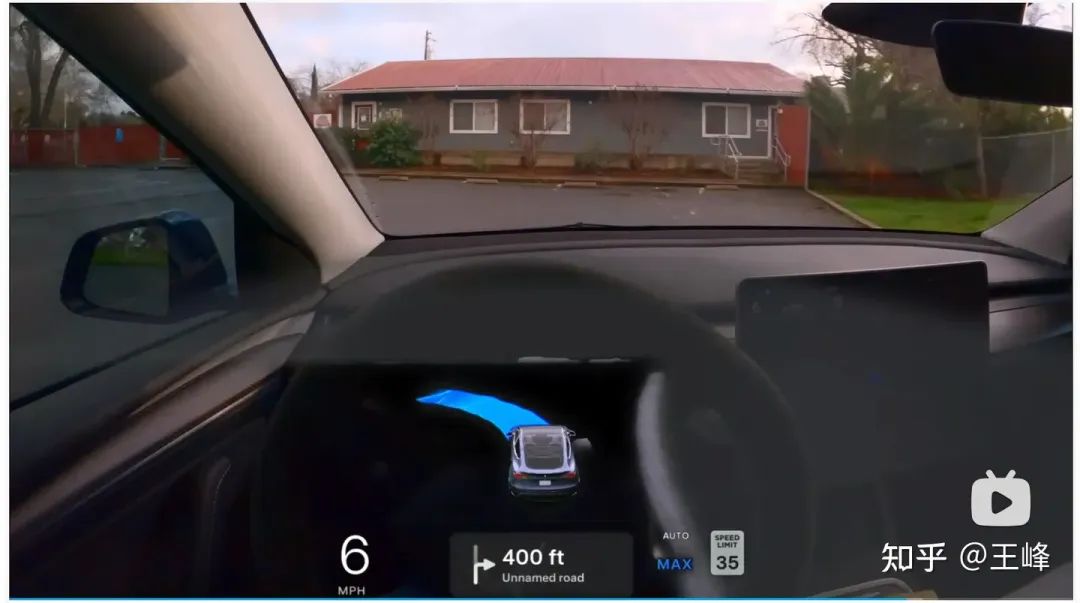
다른 영상들은 모두 주요 도로 주행에 관한 것입니다. 주요 도로에서는 FSD v12의 성능이 매우 매끄럽고 큰 문제가 없으며 특히 야간 차선 감지도 매우 안정적이지만 제 생각에는 대부분의 제조업체도 이 수준을 달성할 수 있습니다. 이에 대해서는 많이 언급하지 않겠습니다.
주차장만 보면 상류 결과를 보지 않으면 스티어링 휠이 좌우로 회전하게 만든 전면 OCC의 오인식을 제외하면 FSD v12의 궤적은 여전히 비교적 매끄럽고, 오류가 있어도 막히는 상황은 없습니다. 보행자, 불규칙하게 움직이는 장애물(트롤리), 바닥에 물이 있는 장면에서는 성능이 정말 괜찮습니다.
Tesla는 여전히 중간 모듈 감독과 함께 멀티 태스킹 엔드 투 엔드를 사용하므로 프런트 엔드에서는 여전히 obj det 및 occ의 결과를 표시할 수 있습니다. 그러나 엔드투엔드 규제가 반드시 업스트림 결과를 수용하는 것은 아닙니다. 가까운 거리에서 감지를 놓치더라도 반드시 시동 및 충돌이 발생하는 것은 아니며, 가까운 거리에서 잘못된 감지가 반드시 차량의 충돌을 일으키는 것은 아닙니다. 모든 결과는 종합적인 판단을 위해 PNC에 입력됩니다. 이것은 참으로 흥미로운 점입니다. 확실한 것은 머스크가 거짓말을 하고 있지 않다는 것입니다. 이것은 실제로 엔드투엔드 시스템의 성능입니다.
위 내용은 굉장히 멋진! ! ! Tesla 엔드투엔드 시연 영상 분석의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!