



2021년에 씨앗을 심었습니다
BEV 장애물 이야기를 읽은 학생들은 우리 그룹이 10월 21일쯤에 BEV 장애물을 만들기 시작했다는 것을 알아야 합니다. 당시에는 인력이 없어서 BEV 차선 표시를 감히 생각하지 못했습니다. 그런데 12월쯤 인터뷰에서 한 지원자를 만났던 기억이 나는데, 그 분들은 반년 넘게 전체 기술 루트를 하이테크를 통해 BEV 차선 표시 네트워크로 활용했다는 이야기를 들었습니다. 정밀 지도를 통해 실제 값을 훈련하고 효과가 나쁘지 않다고 말합니다. 안타깝게도 그 후보자는 결국 우리에게 오지 않았습니다. 2021년 Telsa AI day에서 가르친 차선 표시 내용과 결합하여 BEV 차선 표시 만들기의 씨앗을 그룹에 심었습니다.
22년 만에 올바른 길로 첫 발을 내딛다
22년 동안 우리 팀의 인력은 매우 부족했는데, 6월과 7월에는 BEV 차선을 탐색할 인력만 있었던 것으로 기억합니다. 하지만 당시 우리 그룹에는 이 일을 2개월 동안 할 수 있었던 동급생이 단 한 명(지금은 Xiaoxuan이라고 칭함)뿐이었습니다. 그러다가 2021년의 씨앗이 싹트기 시작했습니다. 우리는 데이터부터 시작하려고 했습니다. Xiaoxuan 학생은 여전히 매우 훌륭했고(매우 상상력이 풍부했으며, Xiaoxuan도 미래에 모두를 놀라게 할 더 많은 것들을 만들었습니다) 2월에 거의 사용되었습니다. , 고속, 고정밀 지도를 통해 해당 차량 주변의 차선 데이터를 추출할 수 있습니다. 그것이 만들어졌을 때, 모두가 여전히 매우 흥분했던 것을 기억합니다.
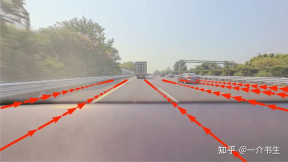
그림 1: 이미지 시스템에 투영된 고정밀 지도 차선의 효과
그림 1에서 볼 수 있듯이 피팅 쌍에는 여전히 몇 가지 문제가 있으므로 Xiaoxuan은 일련의 최적화를 수행했습니다. 두 달 후 Xiaoxuan은 다른 작업을 수행했습니다. 지금 돌이켜보면 우리는 BEV 차선 탐색에 있어 올바른 조치를 취했습니다. 왜냐하면 2021년과 22년에는 많은 우수한 BEV 차선 라인 문서와 코드가 점차 오픈 소스화되었기 때문입니다. 이를 보면 2023년 BEV 차선 도입에 대한 완벽한 이야기가 있을 것이라고 생각할 수도 있다. 그러나 이상은 매우 성취되는 경우가 많지만 현실은 매우 잔인하다.
23년의 걸림돌
저희 BEV 장애물이 BEV가 이 길을 통과할 수 있다는 것을 입증했고, 도로 테스트에서도 좋은 결과를 보여줬으니까요. 그룹은 차선을 고려할 수 있는 더 많은 자원을 확보하기 시작했습니다. 이는 BEV가 아닙니다. 왜? 왜냐하면 당시에는 온라인화에 대한 압박이 컸고, BEV 차선 라인에 대한 경험도 부족했기 때문입니다. 즉, 그룹 전체에서 2D 차선 라인을 대량 생산한 사람이 거의 없었기 때문입니다. . 23년 상반기는 그야말로 방황이었다고 할 수 있겠습니다. 내부적으로 많은 열띤 논의 끝에 최종적으로 2개 라인을 결성하게 되었는데, 그 중 하나가 2D 라인 라인입니다. 대부분의 인력은 2D 라인 라인에 있고, 2D 레인라인 후가공, 경량 모델화에 중점을 두고 있으며, 2D 레인라인을 통해 레인라인 후가공 대량생산 경험을 축적하고 있습니다. 한 라인은 BEV 차선 라인입니다. 소수의 인력(실제로는 1~2명)만이 BEV 차선 라인의 모델 설계에 중점을 두고 모델 경험을 축적하고 있습니다. 이미 많은 BEV 차선 표시 네트워크가 있습니다. 참고하실 수 있도록 여기에 더 큰 영향을 미치는 두 가지 논문을 게시하겠습니다. "HDMapNet: 온라인 HD 맵 구성 및 평가 프레임워크" 및 "MapTR: 온라인 벡터화된 HD 맵 구성을 위한 구조화된 모델링 및 학습"

그림 2: HDMapNet
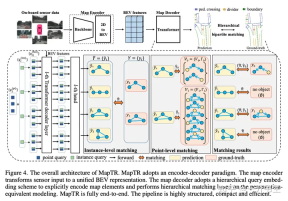
그림 3 MapTR
다행히도 In에서는 4월과 5월에는 2D 차선 후처리 양산 경험을 축적했으며, 5월 말에는 BEV 차선 네트워크도 원활하게 설계됐다. . 차선 후처리를 담당하는 동급생 Dahai가 여전히 매우 유능하다는 점을 여기서 말씀드리고 싶습니다. 그러나 일이 잘 진행되고 있다고 생각하는 순간 악몽이 시작되는 경우가 많습니다. BEV 차선 배치 이후 차량 제어 효과가 이상적이지 않아 모두가 의구심에 빠졌는데, 이는 BEV 차선의 큐빅 스플라인 피팅 문제 때문인가, 아니면 적응력이 떨어지는 문제인가. 다운스트림 매개변수? 다행스럽게도 우리는 도로 테스트 중에 공급업체의 차선 결과를 저장한 다음 이를 시각화 도구에서 우리의 결과와 비교했습니다. 차량 제어 효과가 좋지 않은 경우 먼저 자체 차선 품질에 문제가 없음을 입증하여 하류 운전자가 BEV 차선에 적응할 수 있도록 해야 합니다. 차량을 안정적으로 제어하는 데 한 달, 꼬박 한 달이 걸렸습니다. 우리도 상하이에서 쑤저우까지 달렸던 것을 분명히 기억합니다. 여전히 토요일이었습니다. 그룹의 모든 사람들은 고속 차량 제어 효과를 보고 매우 흥분했습니다.
그러나 이야기에는 우여곡절이 있는 경우가 많습니다. 차선 데이터를 생성하려면 고속, 고정밀 지도만 사용할 수 있습니다. 도시는 어떻게 해야 할까요? 아직 해결해야 할 안타까운 사건들이 너무 많습니다. 이때 마침내 중요한 사람이 등장하게 됩니다. 그를 Classmate Xiaotang(우리 데이터 그룹의 큰 관리자)이라고 부르자. Xiaotang과 다른 사람들은 포인트 클라우드 재구성을 사용하여 클립을 재구성했습니다. (이 과정은 꽤 고통스러웠습니다. 그 두 달이 그들에게 가장 스트레스가 많은 시간이었던 것으로 기억합니다. 하하. 물론 Xiaotang과 저는 종종 사랑에 빠져 서로를 죽였습니다. 기타. 결국 회의 중에 또 데이터가 없다는 말을 자주 듣습니다). 그렇다면 재건축 후 라벨링은 어떻게 할까요? 당시 공급업체를 보면 라벨링 경험은커녕 이런 라벨링 도구를 갖춘 곳도 없었습니다. Xiaotang 및 다른 사람들과 함께 긴 한 달 후에 주석 도구는 마침내 공급업체와 함께 다듬어졌습니다. (우리는 전체 자율주행 주석 산업에 힘을 실어주고 있다고 농담을 자주 합니다. 이 과정은 정말 고통스럽고 클립을 재구축하는 작업은 로드 속도가 정말 느립니다.) 그러나 전체 라벨링은 여전히 상대적으로 느리거나 비용이 많이 듭니다. 이때 Xiaoxuan은 차선 사전 라벨링 대형 모델로 데뷔했으며 (대형 모델 차선 사전 라벨링의 효과는 여전히 뛰어납니다) 놀란 표정으로 그를 바라보았다. 이 일련의 조합 후에 차선 데이터 생성이 마침내 거의 준비되었습니다. 8월에는 BEV 차선 제어 차선 라인이 잘 반복되어 간단한 고속 조종 기능에 적합합니다. 이제 Xiaoxuan은 대형 모델의 사전 표시된 방향으로 여전히 우리에게 더 많은 놀라움을 선사하고 있습니다. 우리와 Xiaotang은 여전히 사랑에 빠져 서로를 죽이고 있습니다.
그러나 그렇게 쉽게 끝나는 이야기는 없습니다. 9월부터 다중 모드(Lidar, 카메라, 레이더) 및 다중 작업(차선, 장애물, Occ) 사전 융합 모델 작업을 시작했으며 이후 도시 내비게이션을 지원할 예정입니다. 파워(NCP)는 인지를 중시하고 지도를 무시하는 이른바 솔루션이다. BEV 장애물 및 BEV 차선 라인에 대한 경험을 바탕으로 머지않아 9월 말까지 차량에 융합 네트워크를 구축할 예정입니다. 도로 표지판 인식, 교차로 토폴로지 등과 같은 차선에 많은 하위 작업도 추가되었습니다. 이 과정에서 우리는 BEV 차선의 후처리를 업그레이드하고 차선 큐빅 스플라인 피팅을 버리고 점 추적 방식을 채택했습니다. 점 추적 방식과 차선 모델의 출력은 쉽게 잘 결합될 수 있습니다. 이 과정도 고통스러웠습니다. 2개월 연속으로 주 1회 특별회의를 열었습니다. 결국 피팅 계획대로 잘 해왔지만, 더 높은 한계점에 도달하기 위해서는 고통과 행복만이 있을 뿐입니다. 드디어 기본 기능을 도로 테스트에 넣었습니다.
그림 4를 간단히 설명하겠습니다. 왼쪽은 차선 지점 추적의 효과입니다. 현재 우리 모델의 인식 범위는 차량 뒤에 몇 가지 지점이 있음을 알 수 있습니다. 추적을 통해 남겨진 것입니다. 오른쪽은 우리가 구축한 실시간 인식 맵입니다. 물론 아직은 빠른 반복 과정을 거치고 있으며 아직 해결해야 할 문제도 많습니다.
24년이 새로운 시작입니다
. 24년만에 서서 21년의 지금까지의 성장과 축적을 되돌아보니 21년 그 시점에 BEV를 할 수 있는 기회가 있어서 정말 다행이었습니다. 또한 같은 생각을 가진 친구들이 서로를 보완해 주는 그룹이 있다는 것도 매우 행운입니다. 24년은 프리퓨전 모델의 양산, 데이터 방향성 노력, 타이밍 모델 발굴, 엔드투엔드 상상력 등 우리가 추구해야 할 것들이 많습니다.
위 내용은 BEV 차선 도입에 대해 조금의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 Gemma Scope : AI의 사고 과정으로 들여다 보는 Google의 현미경Apr 17, 2025 am 11:55 AM
Gemma Scope : AI의 사고 과정으로 들여다 보는 Google의 현미경Apr 17, 2025 am 11:55 AM젬마 범위로 언어 모델의 내부 작업 탐색 AI 언어 모델의 복잡성을 이해하는 것은 중요한 도전입니다. 포괄적 인 툴킷 인 Gemma Scope의 Google 릴리스는 연구원에게 강력한 강력한 방법을 제공합니다.
 비즈니스 인텔리전스 분석가는 누구이며 하나가되는 방법은 무엇입니까?Apr 17, 2025 am 11:44 AM
비즈니스 인텔리전스 분석가는 누구이며 하나가되는 방법은 무엇입니까?Apr 17, 2025 am 11:44 AM비즈니스 성공 잠금 해제 : 비즈니스 인텔리전스 분석가가되는 가이드 원시 데이터를 조직의 성장을 이끌어내는 실행 가능한 통찰력으로 바꾸는 것을 상상해보십시오. 이것은 비즈니스 인텔리전스 (BI) 분석가의 힘 - GU에서 중요한 역할입니다.
 SQL에서 열을 추가하는 방법? - 분석 VidhyaApr 17, 2025 am 11:43 AM
SQL에서 열을 추가하는 방법? - 분석 VidhyaApr 17, 2025 am 11:43 AMSQL의 Alter Table 문 : 데이터베이스에 열을 동적으로 추가 데이터 관리에서 SQL의 적응성이 중요합니다. 데이터베이스 구조를 즉시 조정해야합니까? Alter Table 문은 솔루션입니다. 이 안내서는 Colu를 추가합니다
 비즈니스 분석가 대 데이터 분석가Apr 17, 2025 am 11:38 AM
비즈니스 분석가 대 데이터 분석가Apr 17, 2025 am 11:38 AM소개 두 전문가가 중요한 프로젝트에 대해 협력하는 번화 한 사무실을 상상해보십시오. 비즈니스 분석가는 회사의 목표, 개선 영역을 식별하며 시장 동향과의 전략적 조정을 보장합니다. 시무
 Excel의 Count와 Counta는 무엇입니까? - 분석 VidhyaApr 17, 2025 am 11:34 AM
Excel의 Count와 Counta는 무엇입니까? - 분석 VidhyaApr 17, 2025 am 11:34 AMExcel 데이터 계산 및 분석 : 카운트 및 카운트 기능에 대한 자세한 설명 정확한 데이터 계산 및 분석은 특히 큰 데이터 세트로 작업 할 때 Excel에서 중요합니다. Excel은이를 달성하기위한 다양한 기능을 제공하며, 카운트 및 카운타 기능은 다른 조건에서 셀 수를 계산하기위한 핵심 도구입니다. 두 기능 모두 셀을 계산하는 데 사용되지만 설계 목표는 다른 데이터 유형을 대상으로합니다. Count 및 Counta 기능의 특정 세부 사항을 파고 고유 한 기능과 차이점을 강조하고 데이터 분석에 적용하는 방법을 배우겠습니다. 핵심 포인트 개요 수를 이해하고 쿠션하십시오
 Chrome은 AI와 함께 여기에 있습니다 : 매일 새로운 것을 경험하고 있습니다 !!Apr 17, 2025 am 11:29 AM
Chrome은 AI와 함께 여기에 있습니다 : 매일 새로운 것을 경험하고 있습니다 !!Apr 17, 2025 am 11:29 AMChrome 's AI Revolution : 개인화되고 효율적인 탐색 경험 인공 지능 (AI)은 우리의 일상 생활을 빠르게 변화시키고 있으며 Chrome은 웹 브라우징 경기장에서 요금을 주도하고 있습니다. 이 기사는 흥분을 탐구합니다
 AI '의 인간 측면 : 웰빙과 4 배의 결론Apr 17, 2025 am 11:28 AM
AI '의 인간 측면 : 웰빙과 4 배의 결론Apr 17, 2025 am 11:28 AM재구성 영향 : 4 배의 결론 너무 오랫동안 대화는 AI의 영향에 대한 좁은 견해로 인해 주로 이익의 결론에 중점을 두었습니다. 그러나보다 전체적인 접근 방식은 BU의 상호 연결성을 인식합니다.
 5 게임 변화 양자 컴퓨팅 사용 사례에 대해 알아야합니다.Apr 17, 2025 am 11:24 AM
5 게임 변화 양자 컴퓨팅 사용 사례에 대해 알아야합니다.Apr 17, 2025 am 11:24 AM상황이 그 시점을 꾸준히 움직이고 있습니다. 양자 서비스 제공 업체와 신생 기업에 쏟아지는 투자는 업계의 중요성을 이해하고 있음을 보여줍니다. 그리고 점점 더 많은 실제 사용 사례가 그 가치를 보여주기 위해 떠오르고 있습니다.


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

MinGW - Windows용 미니멀리스트 GNU
이 프로젝트는 osdn.net/projects/mingw로 마이그레이션되는 중입니다. 계속해서 그곳에서 우리를 팔로우할 수 있습니다. MinGW: GCC(GNU Compiler Collection)의 기본 Windows 포트로, 기본 Windows 애플리케이션을 구축하기 위한 무료 배포 가능 가져오기 라이브러리 및 헤더 파일로 C99 기능을 지원하는 MSVC 런타임에 대한 확장이 포함되어 있습니다. 모든 MinGW 소프트웨어는 64비트 Windows 플랫폼에서 실행될 수 있습니다.

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

WebStorm Mac 버전
유용한 JavaScript 개발 도구

Dreamweaver Mac版
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)

