
ホームページ >テクノロジー周辺機器 >AI >LightSim: 現実的で制御可能かつスケーラブルなシミュレーション エクスペリエンスを実現する、NeurIPS 2023 で発表された自動運転照明シミュレーション プラットフォーム
LightSim: 現実的で制御可能かつスケーラブルなシミュレーション エクスペリエンスを実現する、NeurIPS 2023 で発表された自動運転照明シミュレーション プラットフォーム

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2023-12-15 16:22:011493ブラウズ
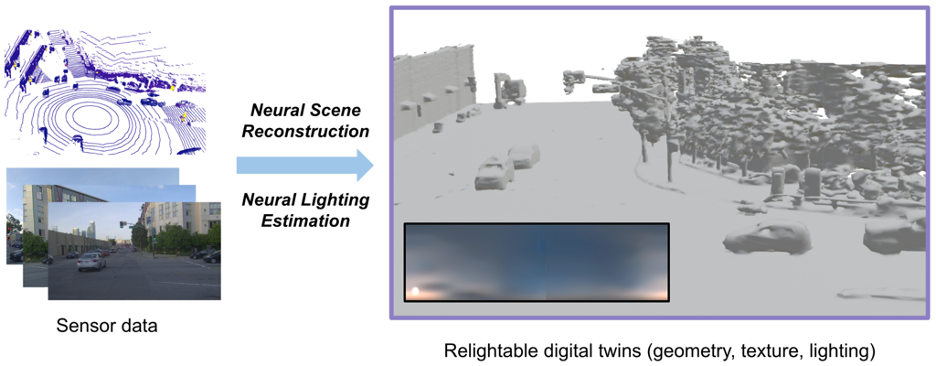
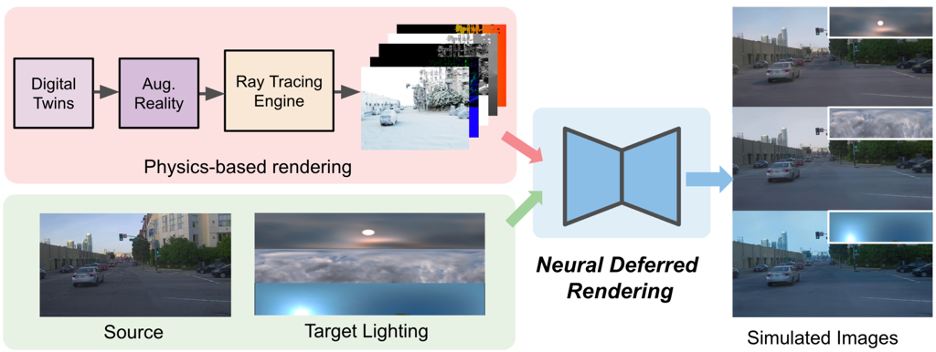
最近、Waabi AI、トロント大学、ウォータールー大学、MIT の研究者らは、NeurIPS 2023 で新しい自動運転照明シミュレーション プラットフォーム LightSim を提案しました。研究者らは、実データからペアの照明トレーニング データを生成し、データ欠損やモデル移行損失の問題を解決する方法を提案しました。 LightSim は、神経放射場 (NeRF) と物理ベースのディープ ネットワークを使用して車両の運転ビデオをレンダリングし、大規模な実際のデータ上で動的なシーンの照明シミュレーションを初めて実現します。 
- # プロジェクト Web サイト: https://waabi.ai/lightsim
- 論文リンク: https://openreview.net/pdf?id=mcx8IGneYw
#もう 1 つは、データ駆動型のシミュレーション手法に基づいています。ニューラル レンダリングを使用して、センサーによって観察されたデータを複製する現実世界のデジタル ツインを再構築します。このアプローチにより、よりスケーラブルなシーン作成とリアリズムの向上が可能になりますが、既存のテクノロジーはシーンの照明を 3D モデルに焼き込む傾向があり、照明条件の変更や新しいオブジェクトの追加や削除などのデジタル ツインの編集が妨げられます。
以前の作品とは異なり、LightSim は次のことも実現します: 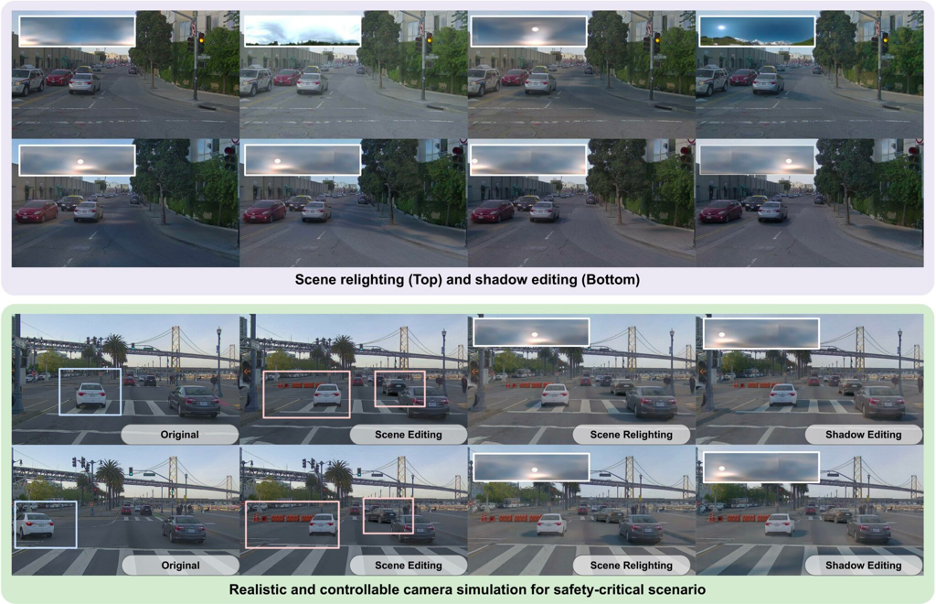
Real (現実的)
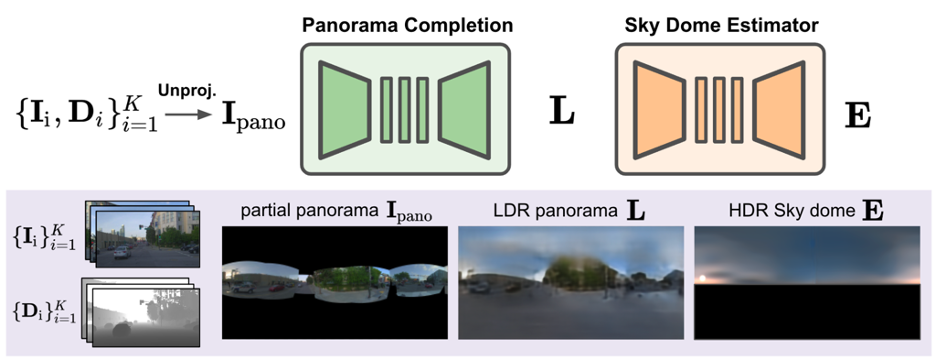
 LightSim は、シーンのバッチ再照明を実行し、推定された実際の HDR 環境マップから同じシーンの時間一貫性のある 3D 対応の新しい照明変更を生成できます。
LightSim は、シーンのバッチ再照明を実行し、推定された実際の HDR 環境マップから同じシーンの時間一貫性のある 3D 対応の新しい照明変更を生成できます。 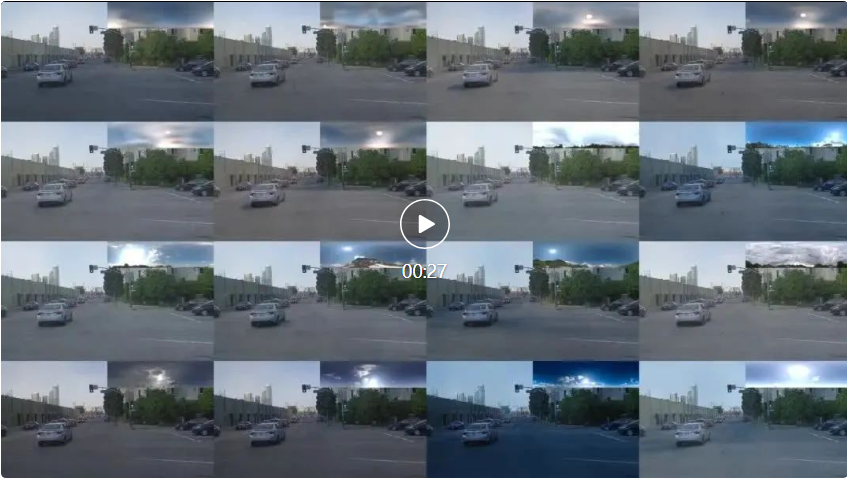
LightSim 照明表現は編集可能です太陽の方向を変えることができるため、太陽の光の方向に関連する照明の変化や影が更新されます。 LightSim は、HDR 環境マップを回転し、それを Neural Deferred Rendering モジュールに渡すことにより、次のビデオを生成します。


例外 照明の変更に加えて、LightSim は次のことを行うことができます。また、建築上の障害物など、特殊なオブジェクトに対して照明を意識した追加を行うこともできます。これらの追加オブジェクトは、オブジェクトの照明シャドウを更新し、オブジェクトを正確に遮蔽し、カメラ構成全体に空間的に適応させることができます。

LightSim のニューラル遅延レンダリング ネットワークによるLightSim は複数の運転ビデオでトレーニングされているため、新しいシナリオに一般化できます。次のビデオは、nuScenes の運転シーンに一般化する LightSim の機能を示しています。 LightSim は、各シーンの照明を認識したデジタル ツインを構築し、それが PandaSet で事前トレーニングされたニューラル遅延レンダリング モデルに適用されます。 LightSim の移行は良好に実行され、比較的堅牢にシーンを再照明できます。
 #リアルで制御可能なカメラ シミュレーション
#リアルで制御可能なカメラ シミュレーション要約するとすべての機能が実証されているため、LightSim は制御可能で多様かつ現実的なカメラ シミュレーションを可能にします。次のビデオは、LightSim のシーン シミュレーション機能を示しています。ビデオでは、白い車が SDV レーンに緊急車線変更を行い、新しい障害物が導入され、白い車がまったく新しいシーンに入りました。新しいシーンのさまざまな照明条件下で LightSim によって生成された効果は次のとおりです。 : 。
 別の例が以下のビデオに示されています。ここでは、新しい道路障害物が挿入された後に新しい車両のセットが追加されています。 LightSim で構築されたシミュレートされた照明を使用すると、新しく追加された車両をシーンにシームレスに統合できます。
別の例が以下のビデオに示されています。ここでは、新しい道路障害物が挿入された後に新しい車両のセットが追加されています。 LightSim で構築されたシミュレートされた照明を使用すると、新しく追加された車両をシーンにシームレスに統合できます。 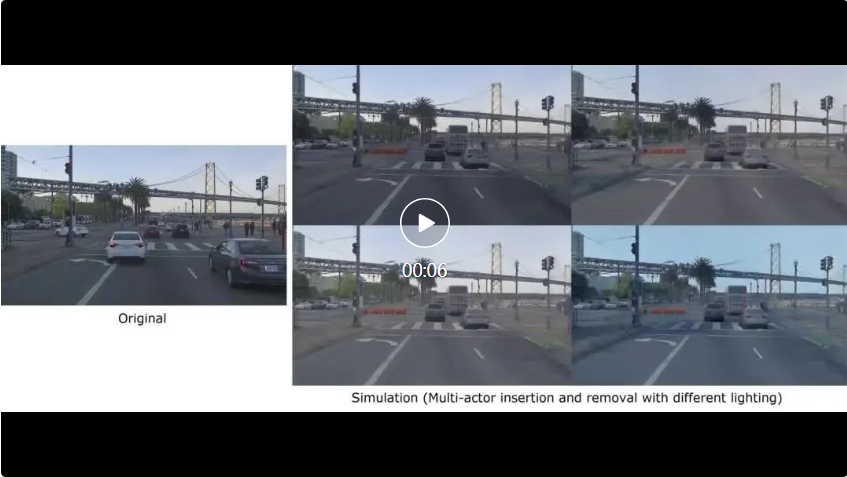
以上がLightSim: 現実的で制御可能かつスケーラブルなシミュレーション エクスペリエンスを実現する、NeurIPS 2023 で発表された自動運転照明シミュレーション プラットフォームの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
声明:
この記事はjiqizhixin.comで複製されています。侵害がある場合は、admin@php.cn までご連絡ください。
前の記事:ASUS Lingyao 14 2024 新製品が AI PC に先駆けて開始価格 6,599 で販売開始次の記事:ASUS Lingyao 14 2024 新製品が AI PC に先駆けて開始価格 6,599 で販売開始