
ホームページ >テクノロジー周辺機器 >AI >ロボットは、小さな気道や血管などの重要な構造を回避しながら、生きた肺組織内で「半自律ナビゲーション」を実現します
ロボットは、小さな気道や血管などの重要な構造を回避しながら、生きた肺組織内で「半自律ナビゲーション」を実現します

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2023-09-26 13:05:091168ブラウズ
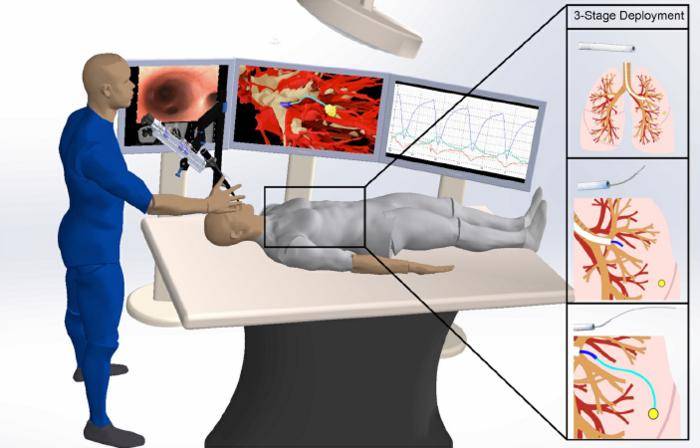
3段階の半自律型医療ロボット肺。画像出典: KUNTZ et al/ノースカロライナ大学
一部の腫瘍は非常に小さいため、肺組織の奥深くに隠れており、医師が到達するのが困難です。この課題に対処するために、ノースカロライナ大学チャペルヒル校とヴァンダービルト大学の研究者は、肺組織を通過できる非常に柔軟で強力なロボットの開発に取り組んできました。 Science Robotics誌に掲載された最近の論文では、この新しいロボットが、小さなエアウェイズや血管などの生きた実験室モデルの重要な構造を避けながら、「ポイントA」から「ポイントB」まで自律的に移動できることが示された。
研究者らは、この技術はロボット気管支鏡検査では達成できない目標を達成できると指摘しました。数センチメートル、場合によっては数ミリメートルの追加距離を提供できるため、肺内の小さな標的を追跡するのに非常に役立ちます。
ロボットは、いくつかの独立したコンポーネントで構成されています。機械的制御アセンブリの原理は、前後に制御された推力を提供するニードルを利用することであり、ニードルの設計により、曲線経路に沿ったステアリングが可能になります。針はニッケルチタン合金で作られており、柔軟性を高めるためにレーザーエッチングされているため、組織内を簡単に移動できます。針のエッチングにより、障害物を避けて前進することが容易になります。カテーテルなどの他の付属品を針と一緒に使用して、肺生検などの処置を行うことができます。
組織内を移動するには、針がどこに向かっているのかを知る必要があります。研究チームは被験者の胸部のCTスキャンと人工知能を利用して、気道、血管、選択した標的を含む肺の3次元モデルを作成した。この 3D モデルを使用すると、針が目標に設定されると、AI 主導のソフトウェアが重要な構造物を避けながら「点 A」から「点 B」に自動的に移動するように指示します。
これは自動運転車に似ていますが、目的地に到着する際に重要な血管などの障害物を避け、肺組織の中を移動することができると研究者は述べています。
書き直す内容は編集長の選択と修正です
人間の体内で働くロボットについて話すとき、人々は常に、それが小さく、柔軟で、賢く、柔軟性があり、強力であることを期待しており、この種のロボットが人間の手や目を補助して、困難な場所に行くことができることを期待しています。人間の手が届き、はっきりと見えるようにするためのものであり、人間の目では区別できない病変。この度、全く新しいロボットが誕生しました。設定された目的地に到達できるだけでなく、小規模だが重要な建造物を柔軟に回避することもできます。ご存知のとおり、人間の体は非常に複雑で、目標に向かう途中には回避する必要のある小さな障害物がたくさんあります。ロボットが前後に自由に動き、病気の治療や治療作業をスムーズに行えるよう、研究者は構造や材質、動作モードなどを工夫する必要があります。
(出典: Science and Technology Daily)
以上がロボットは、小さな気道や血管などの重要な構造を回避しながら、生きた肺組織内で「半自律ナビゲーション」を実現しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
声明:
この記事はsohu.comで複製されています。侵害がある場合は、admin@php.cn までご連絡ください。