
ホームページ >テクノロジー周辺機器 >AI >Zhuji Dynamics、初の「ユニバーサルシャーシ」四輪ロボットW1を発売
Zhuji Dynamics、初の「ユニバーサルシャーシ」四輪ロボットW1を発売

- 王林転載
- 2023-09-26 08:13:021356ブラウズ
W1 は Zhuji Dynamics の「Motion Intelligence」に基づいて開発されていることがわかり、脚と車輪の構造を組み合わせ、自社開発の高性能ジョイントを搭載し、リアルタイムの地形認識と全地形機動性を備えています。単純な脚式ロボットよりも効率的であり、適用可能なシナリオはより豊富で複雑です。
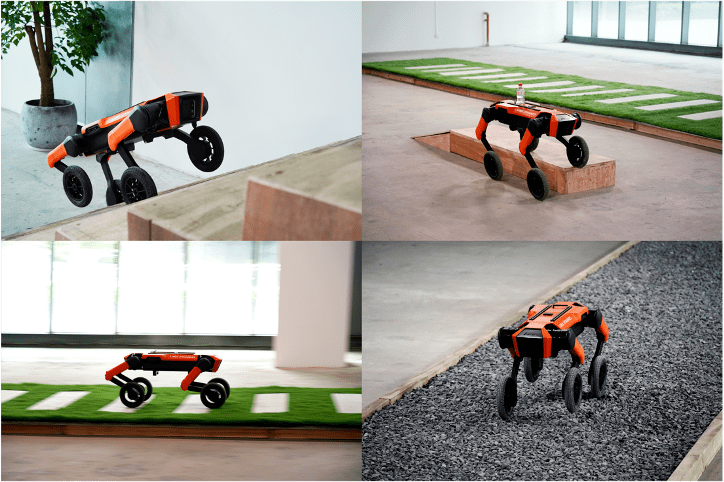
具体的には、W1 は複数の複雑なアプリケーション シナリオでの熟練度検証に合格しました。
階段の上り下り:車輪による安定した階段の上り下りを実現する知覚統合モーション制御;
上り坂と下り坂:車体、斜面、地面をすべて水平に保ち、必要に応じて柔軟に切り替え可能;
Malu Yazi: 移動歩行を柔軟に切り替えることができ、さまざまな離散地形の課題に簡単に対処できます
地面を横切る: 高速移動中、さまざまな作業環境のニーズに合わせて身長を自由に調整できます。
草石路:でこぼこ道走行時、脚の複数の関節が素早く連携して車体の姿勢変動を軽減します。......
 Zhuji Dynamics の創設者 Zhang Wei 氏は、4 輪ロボットは 4 足ロボットのほぼすべての機能を備えている必要があるが、車輪と足の組み合わせによって引き起こされる感覚干渉、状態推定、動作制御の課題があると述べました。数倍に増加しており、その難しさは非常に大きく、市場には成熟したソリューションがありません。
Zhuji Dynamics の創設者 Zhang Wei 氏は、4 輪ロボットは 4 足ロボットのほぼすべての機能を備えている必要があるが、車輪と足の組み合わせによって引き起こされる感覚干渉、状態推定、動作制御の課題があると述べました。数倍に増加しており、その難しさは非常に大きく、市場には成熟したソリューションがありません。
したがって、Zhuji Dynamics は、地形認識、強化学習、多剛体ダイナミクス、ハイブリッド ダイナミクス、モデル予測制御、および確立するその他の分野における学術および研究開発の経験を利用して、認識機能とモーション制御を組み合わせる自社開発のソリューションを選択しました。知覚と制御を統合するアルゴリズム フレームワークを採用し、より高い安定性と強力なリアルタイム制御機能を実現します。
Zhang Wei 氏は、汎用足式ロボットは現在技術爆発期にあり、基礎研究と商品化の交差点が出現し、拡大し続けていると考えています。 Zhuji Dynamics の目標は、全地形モビリティ機能を備えた効率的なユニバーサル シャーシを開発することであり、W1 はその最初の製品です
今後、Zhujian Dynamics は技術研究開発とイノベーションを通じて足式ロボットの実装におけるより多くの問題を解決し、足式ロボットの産業分野への参入を促進し、価値を創造していきます。
以上がZhuji Dynamics、初の「ユニバーサルシャーシ」四輪ロボットW1を発売の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。