
Maison >Périphériques technologiques >IA >Horizon lance l'algorithme open source Sparse4D, faisant un pas de plus vers la conduite autonome de bout en bout
Horizon lance l'algorithme open source Sparse4D, faisant un pas de plus vers la conduite autonome de bout en bout

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2024-01-24 12:00:14999parcourir
Le 22 janvier, Horizon ouvrira la série Sparse4D d'algorithmes de conduite autonome purement visuels pour encourager davantage de développeurs du secteur à participer à l'exploration de directions technologiques de pointe telles que la conduite autonome de bout en bout et la perception clairsemée. Actuellement, l'algorithme Sparse4D a été lancé sur la plateforme GitHub. Les développeurs peuvent suivre le compte officiel Horizon GitHub « Horizon Robotics » pour obtenir le code source.
Sparse4D est une série d'algorithmes destinés à la détection de cibles 3D clairsemées à long terme, qui appartient à la catégorie des technologies de détection de fusion multi-vues temporelles. Face à la tendance de développement de l'industrie de la perception clairsemée, Sparse4D a construit un cadre de perception par fusion pure et clairsemée pour rendre l'algorithme de perception plus efficace et précis, et pour simplifier le système de perception. Par rapport à l'algorithme dense BEV, Sparse4D réduit la complexité de calcul, brise la limitation de la puissance de calcul sur la plage de perception et surpasse l'algorithme dense BEV en termes d'effet de perception et de vitesse de raisonnement. Dans les listes de détection 3D visuelle pure et de suivi 3D de nuScenes, Sparse4D s'est classé premier, devenant SOTA, devant les dernières méthodes, notamment SOLOFusion, BEVFormer v2 et StreamPETR.
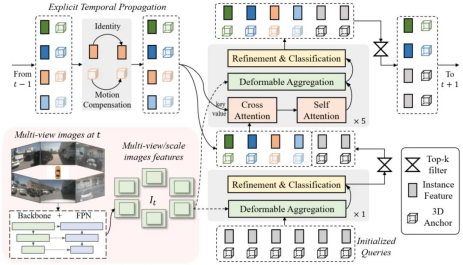
Architecture de l'algorithme Sparse4D
Après trois versions d'itération, l'équipe Horizon Sparse4D a réussi à surmonter des problèmes techniques tels que l'amélioration des performances de l'algorithme clairsemé, la réduction de la complexité du calcul de fusion temporelle et la réalisation de bout en bout. mettre fin au suivi de la cible. Récemment, ils ont publié un article intitulé « Sparse4D v3 : Advancing End-to-End 3D Detection and Tracking », détaillant les résultats de leurs recherches. En utilisant les données commerciales Horizon pour la vérification des performances, l'équipe Sparse4D a réussi son déploiement sur la solution informatique Horizon Journey 5. À l’avenir, selon les plans, la technologie Sparse4D sera utilisée dans les produits de nouvelle génération d’Horizon. L’atteinte de ce résultat favorisera davantage le développement d’Horizon.
Dr. Yu Yinan, vice-président d'Horizon et président de la gamme de produits de plate-forme logicielle, a souligné que l'industrie actuelle est entrée dans l'ère de la détection de bout en bout et qu'un seul réseau peut réaliser l'ensemble de la détection. tâche. Il estime que la série d'algorithmes Sparse4D a amélioré les performances des algorithmes clairsemés à un nouveau niveau et a réussi à réaliser un suivi multicible de bout en bout. Ceci est d'une grande importance à la fois pour la perception clairsemée et la conduite autonome de bout en bout, et peut être considéré comme une avancée majeure. Horizon a choisi d'ouvrir Sparse4D à l'ensemble du secteur, dans l'espoir de progresser en collaboration avec des développeurs exceptionnels du secteur.
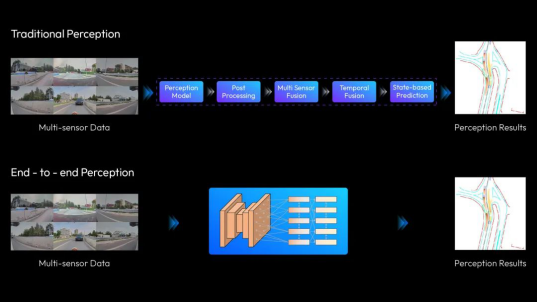
Comparaison entre le système de perception traditionnel et le système de perception de bout en bout
Un autre exemple de la participation active d'Horizon à la construction d'un écosystème logiciel open source de conduite intelligente est la série d'algorithmes open source Sparse4D. . Cet algorithme présente un énorme potentiel d’application dans la mise en œuvre d’une conduite autonome purement visuelle de bout en bout. En outre, Horizon dispose également de technologies de pointe open source telles que l'algorithme VAD et l'algorithme MapTR, qui favoriseront davantage le développement de l'industrie. On s’attend à ce que l’algorithme Sparse4D reçoive une large attention et soit largement utilisé par les développeurs de l’industrie. Les efforts continus d'Horizon accéléreront le processus de développement de l'industrie.
Horizon adhère au concept de transformation de technologies innovantes indépendantes, de produits et de solutions révolutionnaires en valeur commerciale de partenaires écologiques de l'industrie automobile intelligente, injectant ainsi de la vitalité dans le développement de l'industrie. Grâce à une collaboration étroite, une intégration ouverte et une innovation coopérative avec toutes les parties de l'industrie, Horizon s'engage à devenir la source d'eau vive de l'écosystème de l'industrie automobile intelligente et à lui donner une dynamique de développement durable. Horizon comprend parfaitement que la production de masse de véhicules autonomes constitue une avancée importante. Nous continuerons donc à adopter l'open source et à accélérer la mise en œuvre et la production de masse de technologies de pointe. Nous croyons fermement que l'avenir de la coopération gagnant-gagnant avec l'industrie sera plus large et Horizon continuera à travailler dur pour contribuer à la prospérité de l'industrie automobile intelligente.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Que savez-vous de la technologie de navigation inertielle pour la conduite autonome ?
- Analyse de la technologie de positionnement global basée sur des points caractéristiques de la conduite autonome
- Explorer la future technologie de conduite autonome : radar à ondes millimétriques 4D
- Vous pouvez douter de la sécurité de la conduite autonome, mais le big data vous le dit : elle conduit mieux que vous
- Waymo et Uber remodèlent leur partenariat pour explorer conjointement l'application de la technologie de conduite autonome dans le domaine du covoiturage en ligne