
Maison >Périphériques technologiques >IA >CMU publie un nouvel algorithme de robot adroit qui apprend avec précision à faire fonctionner les meubles de tous les jours
CMU publie un nouvel algorithme de robot adroit qui apprend avec précision à faire fonctionner les meubles de tous les jours

- 王林avant
- 2023-04-12 13:43:051043parcourir
La plupart des meubles avec lesquels les gens entrent en contact dans la vie quotidienne sont des "objets articulés", comme les tiroirs avec rails coulissants, les portes à axe de rotation vertical, les fours à axe de rotation horizontal, car les parties principales de ces objets sont reliés par diverses articulations.
Du fait de l'existence de ces articulations, les différentes parties des pièces de l'objet à connecter sont cinématiquement contraintes par les articulations, ces pièces n'ont donc qu'un seul degré de liberté (1 DoF). Ces objets sont partout dans notre vie, notamment dans notre maison quotidienne. Ils constituent une partie importante de notre vie quotidienne. En tant qu’humains, nous constatons que quel que soit le type de mobilier dont nous disposons, nous pouvons rapidement comprendre comment le manipuler et le contrôler. C'est comme si nous connaissions le mouvement de chaque articulation de ces objets.
Alors les robots peuvent-ils prédire comment les meubles bougeront comme les humains ? Ce type de capacité prédictive est difficile à obtenir, et si les robots pouvaient acquérir cette capacité, cela constituerait un énorme coup de pouce pour les robots domestiques.
Récemment, deux étudiants du laboratoire R-PAD du professeur David Held de la CMU School of Robotics, Ben Eisner et Harry Zhang, ont fait des percées dans la manipulation d'objets communs complexes et ont lancé FlowBot 3D, un réseau neuronal 3D basé sur robot. Algorithmes qui expriment et prédisent efficacement les trajectoires de mouvement de parties d’objets articulés, tels que les meubles de tous les jours. L'algorithme contient deux parties.
La première partie est la partie perception, qui utilise un réseau neuronal profond 3D pour prédire la trajectoire de mouvement instantané tridimensionnel (Flux Articulé 3D) à partir des données de nuage de points du meuble manipulé.
La deuxième partie de l'algorithme est la partie politique, qui utilise le flux articulé 3D prédit pour sélectionner la prochaine action du robot. Les deux sont entièrement appris dans le simulateur et peuvent être mis en œuvre directement dans le monde réel sans recyclage ni réglage. Grâce aux algorithmes FlowBot 3D, les robots peuvent manipuler à volonté des objets articulés tels que des meubles du quotidien, tout comme les humains.


Cet article est actuellement le meilleur article candidat (top 3%) à la plus grande conférence mondiale sur la robotique Robotics Science and Systems (RSS) 2022, et sera exposé à New York, aux États-Unis. en juillet, il a publié et concouru avec 7 autres excellents articles pour l'honneur du meilleur article.
- Adresse papier : https://arxiv.org/pdf/2205.04382.pdf
- Page d'accueil du projet : https://sites.google.com/view/articulated-flowbot-3d
FlowBot 3D s'appuie uniquement sur le simulateur et effectue un apprentissage supervisé dans des données simulées pour apprendre les trajectoires de mouvement instantanées des pièces d'objets communes telles que les meubles quotidiens (3D Articulated Flow). Le flux articulé 3D est une méthode de représentation visuelle de la trajectoire d'un nuage de points qui peut grandement simplifier la complexité de la prochaine stratégie du robot et améliorer la généralisation et l'efficacité. Il suffit au robot de suivre cette trajectoire instantanée et de re-prédire cette trajectoire en boucle fermée pour mener à bien la tâche de manipulation des objets communs.
Auparavant, la méthode conventionnelle de fonctionnement d'objets communs tels que des meubles dans le milieu universitaire consistait à calculer la direction du mouvement de la pièce à travers les caractéristiques géométriques de l'objet actionné (telles que la position et la direction des pièces connectées), ou en imiter des stratégies d'experts (généralement des humains) pour apprendre le fonctionnement d'objets spécifiques afin de réaliser des actions complexes de manipulation conjointe d'objets. Ces méthodes traditionnelles du monde universitaire ne se généralisent pas bien et sont moins efficaces dans l'utilisation des données. La formation nécessite la collecte de grandes quantités de données de démonstration humaine. Contrairement à ceux-ci, FlowBot 3D est le premier apprentissage purement basé sur simulateur qui ne nécessite pas que les humains fournissent des données de démonstration, et l'algorithme permet au robot de calculer le chemin optimal de manipulation d'objet en apprenant la trajectoire de mouvement instantanée de chaque pièce, de sorte que le l’algorithme a une grande généralisabilité. C'est cette fonctionnalité qui permet à FlowBot 3D de se généraliser à des objets invisibles lors de la formation sur simulateur, en manipulant avec succès des meubles réels du quotidien directement dans le monde réel.
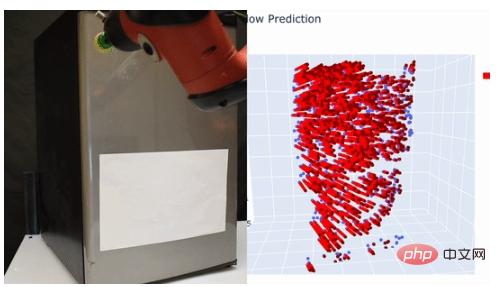
Les animations suivantes démontrent le processus de manipulation de FlowBot 3D. À gauche se trouve la vidéo manipulée et à droite la trajectoire de mouvement instantanée prévue du nuage de points Articulated Flow 3D. L'algorithme FlowBot 3D permet d'abord au robot d'identifier quelle partie d'un objet peut être manipulée, puis de prédire la direction de mouvement de cette pièce.
Ouvrez la porte du réfrigérateur :

Ouvrez le couvercle des toilettes :

Ouvrez le tiroir :

Un critique de cet article a déclaré : Dans l’ensemble, cet article constitue une contribution considérable à contrôle robotique.

Alors, comment FlowBot 3D apprend-il cette compétence ?
Lorsque les humains voient un nouveau meuble, comme une porte, nous savons que la porte tourne selon un axe de porte, et nous savons que les contraintes de l'axe de la porte permettent à la porte de tourner dans un seul sens, donc. nous pouvons suivre la direction imaginée dans notre esprit pour ouvrir la porte. Par conséquent, si vous souhaitez qu'un robot soit vraiment adroit et efficace pour prédire les méthodes de manipulation et les trajectoires de mouvement d'objets communs tels que des meubles, un moyen efficace consiste à laisser le robot comprendre les contraintes cinématiques de ces pièces, afin qu'il puisse prédire le mouvement. déplacement de ces objets.
La méthode spécifique de FlowBot 3D n'est pas compliquée et repose uniquement sur des simulateurs sans données humaines réelles compliquées. De plus, un autre avantage du simulateur est que dans le simulateur, les fichiers de données 3D (URDF) de ces objets domestiques contiennent les contraintes cinématiques de chaque pièce et les paramètres spécifiques des contraintes, donc la trajectoire de mouvement de chaque pièce est dans le Le simulateur peut être calculé avec précision.
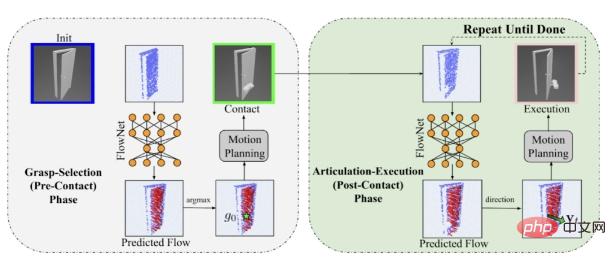

Deux modules pour FlowBot 3D.
Pendant la formation sur simulateur, le robot observe les données du nuage de points tridimensionnel de l'objet manipulé comme données d'entrée dans le module de vision du robot. Le module de vision (module de perception) utilise PointNet++ pour prédire la trajectoire du flux articulé 3D de chaque point du nuage de points d'entrée sous l'action d'une force externe (par exemple, après avoir ouvert le tiroir de 1 cm, la porte s'ouvre de 5 degrés vers l'extérieur), en utilisant le vecteur de coordonnées tridimensionnelles exprimé sous une forme médiocre. Les données réelles de cette trajectoire de mouvement peuvent être calculées avec précision grâce à la cinématique avant. En soustrayant la coordonnée vectorielle tridimensionnelle actuelle de la coordonnée vectorielle tridimensionnelle suivante, la trajectoire de mouvement de la partie d'objet manipulée peut être obtenue. Par conséquent, pendant la formation, seule la perte L2 du flux articulé 3D prévu doit être minimisée pour un apprentissage supervisé.

Dans cette image, les points bleus sont les données de nuage de points observées, et les flèches rouges représentent la trajectoire de mouvement prévue du flux articulé 3D de la façade.
En apprenant de cette manière, FlowBot 3D peut apprendre la direction du mouvement de chaque pièce sous des contraintes cinématiques ainsi que la vitesse relative et la direction relative (vitesse) de chaque point de la pièce se déplaçant sous la même force). Les articles ménagers courants sont prismatiques et révolutionnaires. Pour les pièces à contraction, telles que les tiroirs, la direction du mouvement et la vitesse de chaque point sur la surface du tiroir sont les mêmes lorsqu'ils reçoivent la même force externe. Pour les pièces rotatives, telles que les portes, la direction de mouvement de chaque point sur la surface de la porte est la même lorsqu'il reçoit la même force externe, mais la vitesse augmente à mesure que l'on s'éloigne de l'axe de rotation. Les chercheurs ont utilisé les lois physiques de la robotique (théorie des vis) pour prouver que le flux articulé 3D le plus long peut maximiser l'accélération de l'objet. Selon la deuxième loi de Newton, cette stratégie est la solution optimale.



Sur la base théorique, en fonctionnement réel, ce que le robot doit faire est de prédire la trajectoire de mouvement de chaque point grâce au module de vision de FlowBot 3D dans la trajectoire. de chaque point, trouvez le point correspondant à la direction d'écoulement articulée 3D la plus longue comme point de contrôle et prédisez la trajectoire de mouvement de ce point de contrôle en boucle fermée. Si le point de manipulation sélectionné ne peut pas être saisi avec succès (par exemple, la surface ne répond pas aux conditions de préhension de la main du robot), alors FlowBot 3D sélectionnera le point ayant la deuxième longueur la plus longue qui répond aux conditions de préhension.
De plus, grâce aux caractéristiques de PointNet++, FlowBot 3D prédit la trajectoire de mouvement de chaque point et ne s'appuie pas sur les caractéristiques géométriques de l'objet lui-même. Il est très robuste aux éventuelles occlusions d'objets par les robots. De plus, comme cet algorithme est en boucle fermée, le robot peut corriger ses éventuelles erreurs lors de l’étape suivante de prédiction.
Performances de FlowBot 3D dans le monde réelFlowBot 3D a la capacité de surmonter les défis de généralisation dans le monde réel. Le concept de conception de FlowBot 3D est que tant qu'il peut prédire avec précision la trajectoire de mouvement du flux articulé 3D de l'objet manipulé, l'étape suivante consiste à suivre cette trajectoire pour terminer la tâche.
Un autre point important est que FlowBot 3D utilise un seul modèle d'entraînement pour manipuler plusieurs catégories d'éléments, y compris des catégories qui n'ont pas été vues lors de l'entraînement. Et dans le monde réel, le robot n’a besoin que d’utiliser le modèle obtenu grâce à cette pure formation sur simulateur pour manipuler une variété d’objets réels. Ainsi, dans le monde réel, puisque les contraintes cinématiques des objets domestiques sont très largement les mêmes que dans le simulateur, FlowBot 3D peut être directement généralisé au monde réel.

Articles ménagers utilisés par FlowBot3D dans des expériences réelles (y compris les poubelles, les réfrigérateurs, les sièges de toilettes, les boîtes, les coffres-forts, etc.)
Dans le simulateur, le robot utilise certaines catégories d'articles ménagers pour la formation, y compris les agrafeuses, les poubelles, les tiroirs, les fenêtres, les réfrigérateurs, etc. Dans le simulateur et les tests réels, les données de test proviennent de nouveaux objets de la catégorie de formation et des catégories qui n'ont pas été vues pendant la formation
. 




En comparaison, dans le monde universitaire, les méthodes courantes basées sur l'apprentissage par imitation nécessitent. un guidage manuel pour apprendre à manipuler de nouveaux objets, ce qui rend irréaliste la mise en œuvre de ces robots dans le monde réel, en particulier dans les scénarios de robots domestiques. De plus, les données de nuages de points 3D sont plus puissantes que celles utilisées par d'autres méthodes. car le nuage de points peut permettre au robot de comprendre chaque articulation et la relation entre les articulations, étant ainsi capable de comprendre et de prédire la trajectoire de mouvement de la pièce à un niveau supérieur, améliorant considérablement la généralisation .
Les résultats expérimentaux montrent que FlowBot 3D peut atteindre une distance « complètement ouverte » de moins de 10 % et une portée réussie de plus de 90 % lors de l'utilisation de la plupart des objets (qu'il s'agisse de catégories vues ou non vues pendant l'entraînement). En comparaison, d’autres méthodes basées sur l’apprentissage par imitation (DAgger) ou l’apprentissage par renforcement (SAC) sont loin derrière et manquent de généralisation.

En bref, FlowBot 3D est un travail à fort potentiel. Il peut être déployé efficacement dans le monde réel sans nécessiter de réglage fin. Ce travail montre également que les progrès de la vision par ordinateur peuvent changer le domaine de la robotique, en particulier l'expression visuelle des trajectoires de mouvement appelée flux articulé 3D, qui peut être appliquée à plusieurs tâches pour simplifier la sélection de la stratégie du robot et le processus de prise de décision. Avec cette expression généralisable, les méthodes d’apprentissage sur simulateur auront le potentiel d’être directement déployées dans le monde réel, ce qui réduira considérablement le coût de la formation et de l’apprentissage futurs des robots domestiques.
Prochain plan de FlowBot 3DActuellement, l'équipe de recherche tente d'appliquer la méthode de compréhension et de prédiction du flux à des objets autres que les objets communs, par exemple comment utiliser le flux pour prédire la trajectoire d'un objet avec 6 degrés de liberté . Dans le même temps, l'auteur tente d'utiliser le flux comme expression visuelle générale pour l'appliquer à d'autres tâches d'apprentissage des robots, telles que l'apprentissage par renforcement, augmentant ainsi l'efficacité, la robustesse et la généralisabilité de l'apprentissage.
Page d'accueil du professeur agrégé David Held : https://davheld.github.io/Page d'accueil de Ben Eisner : https://beisner.me/Page d'accueil de Harry Zhang : https://harryzhangog.github.io/
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI