
Maison >Périphériques technologiques >IA >YOLOv10 est là ! Véritable détection de cible de bout en bout en temps réel
YOLOv10 est là ! Véritable détection de cible de bout en bout en temps réel

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBoriginal
- 2024-06-09 17:29:311179parcourir
Au cours des dernières années, YOLO est devenu un paradigme dominant dans le domaine de la détection d'objets en temps réel en raison de son équilibre efficace entre le coût de calcul et les performances de détection. Les chercheurs ont mené une exploration approfondie de la conception structurelle, des objectifs d’optimisation, des stratégies d’amélioration des données, etc. des YOLO et ont réalisé des progrès significatifs. Cependant, le recours au post-traitement à la suppression non maximale (NMS) entrave le déploiement de bout en bout des YOLO et a un impact négatif sur la latence d'inférence. De plus, la conception de divers composants dans les YOLO manque d'un examen complet et approfondi, ce qui entraîne une redondance informatique importante et limite les performances du modèle. Cela se traduit par une efficacité sous-optimale et un énorme potentiel d’amélioration des performances. Dans ce travail, nous visons à faire progresser davantage la limite performance-efficacité des YOLO à la fois en termes de post-traitement et d'architecture de modèle. À cette fin, nous proposons d’abord une double allocation persistante pour la formation des YOLO sans NMS, qui apporte simultanément des performances compétitives et une faible latence d’inférence. En outre, nous introduisons une stratégie complète de conception de modèles axée sur l’efficacité et la précision pour les YOLO. Nous avons entièrement optimisé chaque composant des YOLO du point de vue de l'efficacité et de la précision, ce qui réduit considérablement les frais de calcul et améliore les capacités du modèle. Le résultat de nos efforts est une nouvelle génération de la série YOLO conçue pour la détection d'objets de bout en bout en temps réel, appelée YOLOv10. Des expériences approfondies montrent que YOLOv10 atteint des performances et une efficacité de pointe à différentes échelles de modèle. Par exemple, sur l'ensemble de données COCO, notre YOLOv10-S est 1,8 fois plus rapide que RT-DETR-R18 sous un AP similaire, tout en réduisant les paramètres et les opérations en virgule flottante (FLOP) de 2,8 fois. Par rapport à YOLOv9-C, YOLOv10-B réduit la latence de 46 % et réduit les paramètres de 25 % pour les mêmes performances. Lien du code : https://github.com/THU-MIG/yolov10.
Quelles améliorations y a-t-il dans YOLOv10 ?
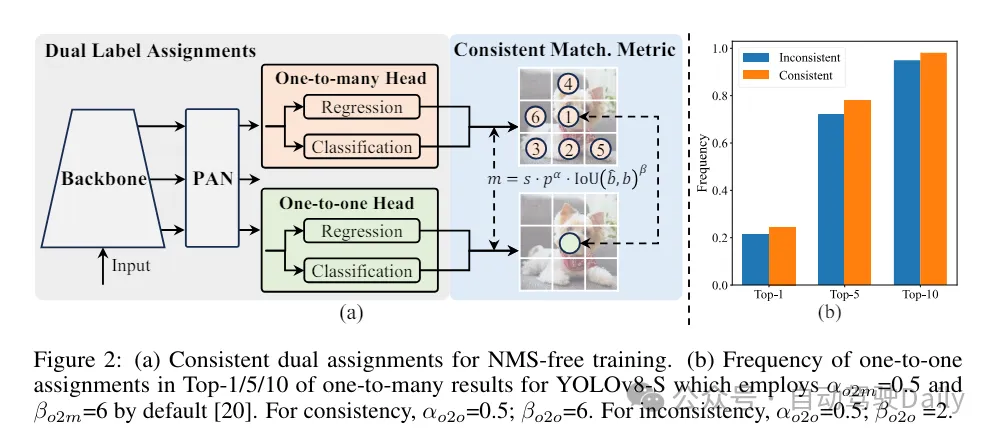
Résolvez d'abord le problème de prédiction redondante en post-traitement en proposant une stratégie persistante de double allocation pour les YOLO sans NMS. Cette stratégie comprend l'attribution de doubles étiquettes et des métriques de correspondance cohérentes. Cela permet au modèle d'obtenir une supervision riche et harmonieuse pendant la formation tout en éliminant le besoin de NMS pendant l'inférence, obtenant ainsi des performances compétitives tout en maintenant une efficacité élevée.
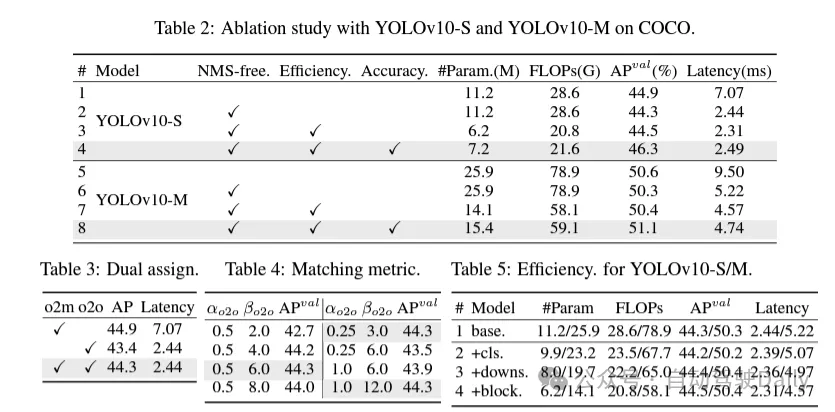
Cette fois, une stratégie complète de conception de modèle axée sur l'efficacité et la précision est proposée pour l'architecture du modèle, et chaque composant des YOLO est examiné de manière approfondie. En termes d'efficacité, des têtes de classification légères, un sous-échantillonnage découplé des canaux spatiaux et des conceptions de blocs guidés par classement sont proposés pour réduire la redondance informatique évidente et obtenir une architecture plus efficace.
En termes de précision, de grandes convolutions du noyau sont explorées et des modules d'auto-attention partielle efficaces sont proposés pour améliorer les capacités du modèle et exploiter le potentiel d'amélioration des performances à faible coût.
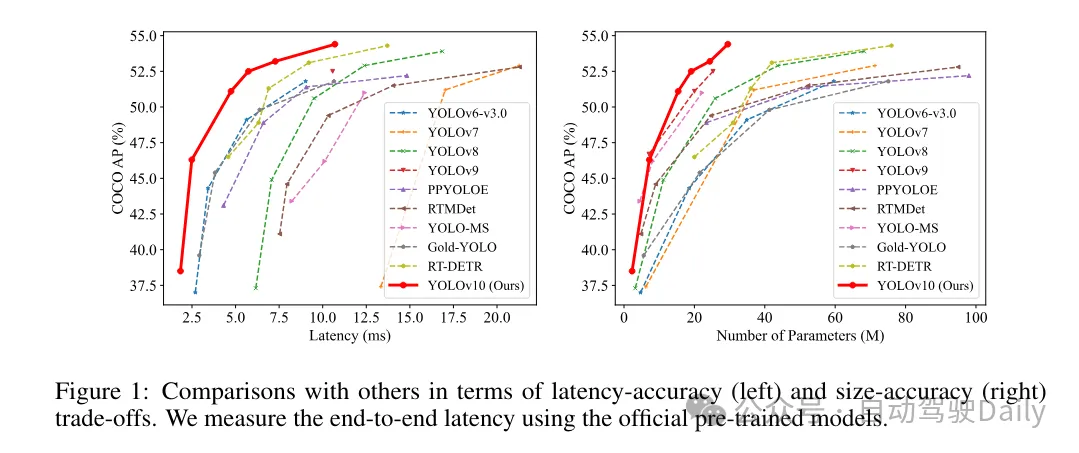
Sur la base de ces méthodes, l'auteur a implémenté avec succès une série de détecteurs de bout en bout en temps réel avec différentes tailles de modèles, à savoir YOLOv10-N/S/M/B/L/X. Des expériences approfondies sur des tests de détection d'objets standard montrent que YOLOv10 démontre la capacité à surpasser les modèles de pointe précédents en termes de compromis entre précision de calcul et différentes tailles de modèle. Comme le montre la figure 1, avec des performances similaires, YOLOv10-S/X est respectivement 1,8 fois/1,3 fois plus rapide que RT-DETR R18/R101. Par rapport à YOLOv9-C, YOLOv10-B atteint une réduction de latence de 46 % pour les mêmes performances. De plus, YOLOv10 présente une efficacité d'utilisation des paramètres extrêmement élevée. YOLOv10-L/X est 0,3 AP et 0,5 AP supérieur à YOLOv8-L/X avec le nombre de paramètres réduit de 1,8 fois et 2,3 fois respectivement. YOLOv10-M atteint un AP similaire à YOLOv9-M/YOLO-MS tout en réduisant le nombre de paramètres de 23 % et 31 % respectivement.
Pendant le processus de formation, les YOLO utilisent généralement TAL (Task Assignment Learning) pour attribuer plusieurs échantillons à chaque instance. L'adoption d'une méthode d'allocation un-à-plusieurs génère des signaux de supervision riches, ce qui permet d'optimiser et d'obtenir des performances plus élevées. Cependant, cela oblige également les YOLO à s'appuyer sur le post-traitement NMS (suppression non maximale), ce qui entraîne une efficacité d'inférence sous-optimale au moment du déploiement. Alors que des travaux antérieurs ont exploré des approches de correspondance un-à-un pour supprimer les prédictions redondantes, ils ajoutent souvent une surcharge d'inférence supplémentaire ou entraînent des performances sous-optimales. Dans ce travail, nous proposons une stratégie de formation sans NMS qui utilise l'attribution de doubles étiquettes et des mesures de correspondance cohérentes, permettant d'obtenir une efficacité élevée et des performances compétitives. Grâce à cette stratégie, nos YOLO n'ont plus besoin de NMS en formation, atteignant ainsi une efficacité élevée et des performances compétitives.
Conception de modèles axée sur l'efficacité. Les composants de YOLO incluent la tige, les couches de sous-échantillonnage, les étapes avec les éléments de base et la tête. Le coût de calcul de la partie principale est très faible, nous effectuons donc une conception de modèle axée sur l'efficacité pour les trois autres parties.
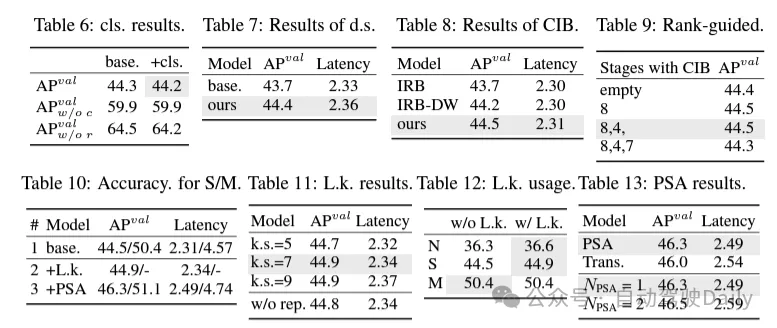
(1) En-tête de classification léger. Dans YOLO, la tête de classification et la tête de régression ont généralement la même architecture. Cependant, ils présentent des différences significatives en termes de temps de calcul. Par exemple, dans YOLOv8-S, le nombre de FLOP et de paramètres de la tête de classification (5,95G/1,51M de FLOP et de paramètres) et de la tête de régression (2,34G/0,64M) sont 2,5 fois et 2,4 fois celui de la régression. tête respectivement. Cependant, en analysant l'impact des erreurs de classification et des erreurs de régression (voir tableau 6), nous avons constaté que la tête de régression est plus importante pour les performances de YOLO. Par conséquent, nous pouvons réduire la surcharge liée aux en-têtes de classification sans nous soucier des problèmes de performances. Par conséquent, nous adoptons simplement une architecture de tête de classification légère, composée de deux convolutions séparables en profondeur avec une taille de noyau de 3 × 3, suivies d'un noyau 1 × 1. Grâce aux améliorations ci-dessus, nous pouvons simplifier l'architecture de la tête de classification légère, qui se compose de deux convolutions séparables en profondeur avec une taille de noyau de convolution de 3 × 3, suivies d'un noyau de convolution 1 × 1. Cette architecture simplifiée peut réaliser des fonctions de classification avec une charge de calcul et un nombre de paramètres réduits.
(2) Sous-échantillonnage découplé des canaux spatiaux. YOLO utilise généralement une convolution standard 3 × 3 régulière avec une foulée de 2, tout en implémentant un sous-échantillonnage spatial (de H × W à H/2 × W/2) et une transformation de canal (de C à 2C). Cela introduit un coût de calcul et un nombre de paramètres non négligeables. Au lieu de cela, nous proposons de découpler les opérations de réduction d’espace et d’augmentation de canal pour obtenir un sous-échantillonnage plus efficace. Plus précisément, la convolution ponctuelle est d'abord utilisée pour moduler les dimensions du canal, puis la convolution en profondeur est utilisée pour le sous-échantillonnage spatial. Cela réduit le coût de calcul et le nombre de paramètres à . Dans le même temps, il maximise la rétention des informations lors du sous-échantillonnage, réduisant ainsi la latence tout en maintenant des performances compétitives.
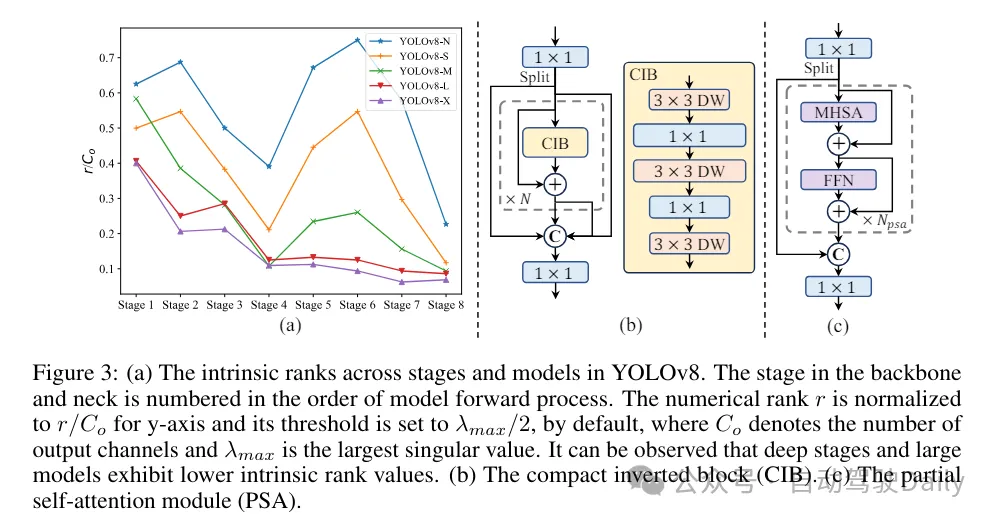
(3) Conception de modules basée sur des conseils de classement. Les YOLO utilisent généralement les mêmes éléments de base pour toutes les étapes, comme le bloc de goulot d'étranglement dans YOLOv8. Pour examiner en profondeur cette conception isomorphe des YOLO, nous utilisons le rang intrinsèque pour analyser la redondance de chaque étape. Plus précisément, le rang numérique de la dernière convolution dans le dernier bloc de base de chaque étape est calculé, ce qui compte le nombre de valeurs singulières supérieures à un seuil. La figure 3 (a) montre les résultats de YOLOv8, montrant que les étapes profondes et les grands modèles sont plus susceptibles de présenter davantage de redondance. Cette observation suggère que le simple fait d’appliquer la même conception de bloc à toutes les étapes n’est pas optimal pour obtenir le meilleur compromis capacité-efficacité. Pour résoudre ce problème, un schéma de conception de modules basé sur le rang est proposé, qui vise à réduire la complexité des étapes qui s'avèrent redondantes grâce à une conception architecturale compacte.
Nous introduisons d'abord une structure de bloc inversé compact (CIB) qui adopte une convolution en profondeur bon marché pour le mélange spatial et une convolution ponctuelle rentable pour le mélange de canaux, comme le montre la figure 3 (b). Il peut servir d’élément de base efficace, par exemple intégré dans les structures ELAN (Figure 3(b)). Ensuite, une stratégie d’allocation de modules basée sur le classement est préconisée pour atteindre une efficacité optimale tout en maintenant un pouvoir compétitif. Plus précisément, étant donné un modèle, classez toutes les étapes selon l'ordre croissant de leur rang intrinsèque. Examinez plus en détail les changements de performances après le remplacement des blocs de base de l'étage principal par CIB. S'il n'y a pas de dégradation des performances par rapport au modèle donné, on passe à l'étape suivante avec remplacement, sinon on arrête le processus. En conséquence, nous pouvons mettre en œuvre des conceptions de blocs compacts adaptatifs à différentes étapes et tailles de modèles, obtenant ainsi une plus grande efficacité sans compromettre les performances.
Basé sur une conception de modèle axée sur la précision. L'article explore en outre les mécanismes de convolution et d'auto-attention à grand noyau pour parvenir à une conception basée sur la précision, dans le but d'améliorer les performances à un coût minimal.
(1) Grande convolution du noyau. L'adoption de convolutions profondes à grand noyau est un moyen efficace d'élargir le champ de réception et d'améliorer les capacités du modèle. Cependant, le simple fait de les exploiter à toutes les étapes peut introduire une contamination dans les éléments peu profonds utilisés pour détecter les petits objets, tout en introduisant également une surcharge et une latence d'E/S significatives dans l'étape haute résolution. Par conséquent, les auteurs proposent d’utiliser des convolutions profondes à grand noyau dans le bloc d’informations inter-étages (CIB) de l’étage profond. Ici, la taille du noyau de la deuxième convolution en profondeur 3 × 3 dans CIB est augmentée à 7 × 7. De plus, une technologie de reparamétrage structurel est adoptée pour introduire une autre branche de convolution de profondeur 3 × 3 afin d'atténuer le problème d'optimisation sans augmenter la surcharge d'inférence. De plus, à mesure que la taille du modèle augmente, son champ de réception s'étend naturellement et les avantages de l'utilisation de grandes convolutions de noyau diminuent progressivement. Par conséquent, les convolutions à grand noyau ne sont utilisées qu’à petite échelle.
(2) Auto-attention partielle (PSA). Le mécanisme d’auto-attention est largement utilisé dans diverses tâches visuelles en raison de ses excellentes capacités de modélisation globale. Cependant, il présente une complexité informatique et une empreinte mémoire élevées. Afin de résoudre ce problème, compte tenu de la redondance omniprésente des têtes d'attention, l'auteur propose une conception efficace de module d'auto-attention partielle (PSA), comme le montre la figure 3. (c). Plus précisément, les fonctionnalités sont divisées uniformément en deux parties par canaux après convolution 1 × 1. Seule une partie des fonctionnalités est entrée dans le bloc NPSA composé d'un module d'auto-attention multi-têtes (MHSA) et d'un réseau à action directe (FFN). Ensuite, les deux parties des fonctionnalités sont épissées et fusionnées par convolution 1×1. De plus, définissez les dimensions des requêtes et des clés dans MHSA sur la moitié des valeurs et remplacez LayerNorm par BatchNorm pour une inférence rapide. Le PSA n'est placé qu'après l'étape 4 avec la résolution la plus basse pour éviter une surcharge excessive causée par la complexité informatique quadratique de l'auto-attention. De cette manière, les capacités d'apprentissage de la représentation globale peuvent être intégrées aux YOLO à faible coût de calcul, améliorant ainsi considérablement les capacités du modèle et les performances.
Comparaison expérimentale
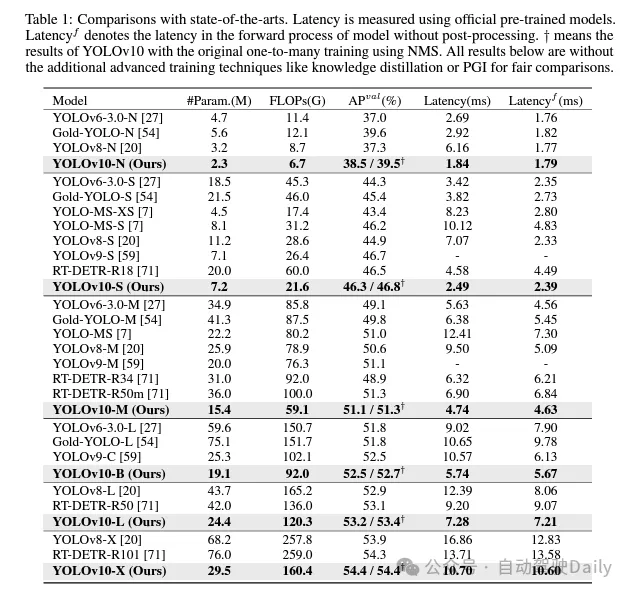
Je ne vais pas trop entrer dans l'introduction ici, juste les résultats ! ! ! La latence est réduite et les performances continuent d'augmenter.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Comment utiliser C++ pour un suivi d'image et une détection de cible hautes performances ?
- Le robot Tesla pleinement évolué ! Les capacités de perception, de cerveau et de contrôle moteur sont améliorées et la solution de bout en bout donne de premiers résultats.
- Alignement précis des fonctionnalités pour améliorer la détection d'objets 3D multimodaux : application de GraphAlign
- Utiliser des algorithmes de réduction de dimensionnalité pour réaliser la détection de cibles : conseils et étapes
- Annotation de cadre de délimitation redondant multi-grille pour une détection précise des objets