



Paper link: https://arxiv.org/pdf/2401.03907.pdf
The multi-modal 3D detector is designed to study safe and reliable autonomous driving perception systems. Although they achieve state-of-the-art performance on clean benchmark datasets, the complexity and harsh conditions of real-world environments are often ignored. At the same time, with the emergence of the visual basic model (VFM), improving the robustness and generalization capabilities of multi-modal 3D detection faces opportunities and challenges in autonomous driving. Therefore, the authors propose the RoboFusion framework, which leverages VFM like SAM to address out-of-distribution (OOD) noise scenarios.
First, we apply the original SAM to an autonomous driving scenario named SAM-AD. To align SAM or SAMAD with multi-modal methods, we introduce AD-FPN to upsample the image features extracted by SAM. To further reduce noise and weather interference, we employ wavelet decomposition to denoise the depth-guided images. Finally, we use a self-attention mechanism to adaptively reweight the fused features to enhance informative features while suppressing excess noise. RoboFusion enhances the resilience of multi-modal 3D object detection by leveraging the generalization and robustness of VFM to gradually reduce noise. As a result, RoboFusion achieves state-of-the-art performance in noisy scenes, according to results from the KITTIC and nuScenes-C benchmarks.
The paper proposes a robust framework, named RoboFusion, which utilizes VFM like SAM to adapt 3D multi-modal object detectors from clean scenes to OOD noisy scenes. Among them, SAM's adaptation strategy is the key.
1) Use features extracted from SAM instead of inferring segmentation results.
2) SAM-AD is proposed, which is a pre-trained SAM for AD scenarios.
3) A new AD-FPN is introduced to solve the feature upsampling problem for aligning VFM with multi-modal 3D detectors.
In order to reduce noise interference and retain signal characteristics, the Deep Guided Wavelet Attention (DGWA) module is introduced to effectively attenuate high and low frequency noise.
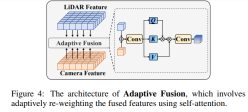
After fusing point cloud features and image features, reweight the features through adaptive fusion to enhance the robustness and noise resistance of the features.
RoboFusion network structure
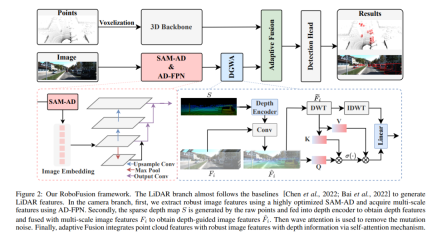
The RoboFusion framework is shown below, with its lidar branch following the baseline [Chen et al., 2022; Bai et al., 2022] to generate laser light Radar signature. In the camera branch, the highly optimized SAM-AD algorithm is first used to extract robust image features, and combined with AD-FPN to obtain multi-scale features. Next, the original points are used to generate a sparse depth map S, which is input into the depth encoder to obtain depth features, and is fused with multi-scale image features to obtain depth-guided image features. Then, the mutation noise is removed through the fluctuating attention mechanism. Finally, adaptive fusion is achieved through a self-attention mechanism to combine point cloud features with robust image features with depth information.
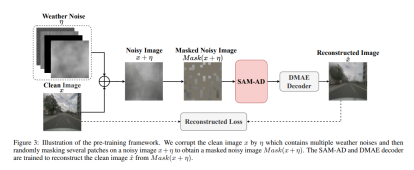
SAM-AD: In order to further adapt SAM to AD (autonomous driving) scenarios, SAM is pre-trained to obtain SAM-AD. Specifically, we collect a large number of image samples from mature datasets (i.e., KITTI and nuScenes) to form the basic AD dataset. After DMAE, SAM is pre-trained to obtain SAM-AD in AD scenarios, as shown in Figure 3. Denote x as the clean image from the AD dataset (i.e. KITTI and nuScenes) and eta as the noisy image generated based on x. The noise type and severity were randomly selected from four weather conditions (i.e., rain, snow, fog, and sunshine) and five severity levels from 1 to 5, respectively. Using SAM, MobileSAM's image encoder as our encoder, while the decoder and reconstruction losses are the same as DMAE.
AD-FPN. As a cueable segmentation model, SAM consists of three parts: image encoder, cue encoder and mask decoder. In general, it is necessary to generalize the image encoder to train the VFM and then train the decoder. In other words, the image encoder can provide high-quality and highly robust image embeddings to downstream models, while the mask decoder is only designed to provide decoding services for semantic segmentation. Furthermore, what we need is robust image features rather than the processing of cue information by the cue encoder. Therefore, we use SAM’s image encoder to extract robust image features. However, SAM utilizes the ViT series as its image encoder, which excludes multi-scale features and only provides high-dimensional low-resolution features. In order to generate multi-scale features required for target detection, inspired by [Li et al., 2022a], an AD-FPN is designed, which provides multi-scale features based on ViT!
Despite the ability of SAM-AD or SAM to extract robust image features, the gap between the 2D domain and the 3D domain still exists, and cameras lacking geometric information in damaged environments often amplify noise and cause negative transfer problems. To alleviate this problem, we propose the Deep Guided Wavelet Attention (DGWA) module, which can be divided into the following two steps. 1) A depth guidance network is designed to add geometry before image features by combining image features and depth features of point clouds. 2) Use Haar wavelet transform to decompose the features of the image into four sub-bands, and then the attention mechanism allows to denoise the information features in the sub-bands!
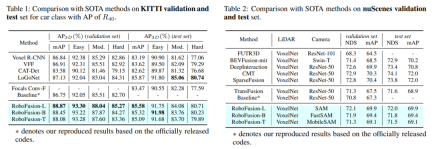
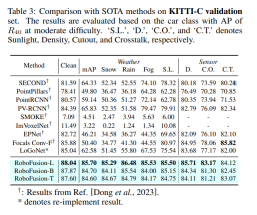
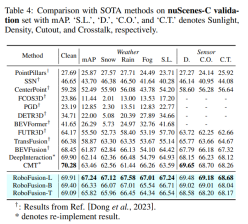
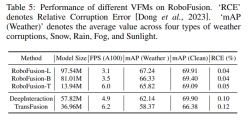
Experimental comparison

The above is the detailed content of RoboFusion for reliable multi-modal 3D detection using SAM. For more information, please follow other related articles on the PHP Chinese website!

![Can't use ChatGPT! Explaining the causes and solutions that can be tested immediately [Latest 2025]](https://img.php.cn/upload/article/001/242/473/174717025174979.jpg?x-oss-process=image/resize,p_40) Can't use ChatGPT! Explaining the causes and solutions that can be tested immediately [Latest 2025]May 14, 2025 am 05:04 AM
Can't use ChatGPT! Explaining the causes and solutions that can be tested immediately [Latest 2025]May 14, 2025 am 05:04 AMChatGPT is not accessible? This article provides a variety of practical solutions! Many users may encounter problems such as inaccessibility or slow response when using ChatGPT on a daily basis. This article will guide you to solve these problems step by step based on different situations. Causes of ChatGPT's inaccessibility and preliminary troubleshooting First, we need to determine whether the problem lies in the OpenAI server side, or the user's own network or device problems. Please follow the steps below to troubleshoot: Step 1: Check the official status of OpenAI Visit the OpenAI Status page (status.openai.com) to see if the ChatGPT service is running normally. If a red or yellow alarm is displayed, it means Open
 Calculating The Risk Of ASI Starts With Human MindsMay 14, 2025 am 05:02 AM
Calculating The Risk Of ASI Starts With Human MindsMay 14, 2025 am 05:02 AMOn 10 May 2025, MIT physicist Max Tegmark told The Guardian that AI labs should emulate Oppenheimer’s Trinity-test calculus before releasing Artificial Super-Intelligence. “My assessment is that the 'Compton constant', the probability that a race to
 An easy-to-understand explanation of how to write and compose lyrics and recommended tools in ChatGPTMay 14, 2025 am 05:01 AM
An easy-to-understand explanation of how to write and compose lyrics and recommended tools in ChatGPTMay 14, 2025 am 05:01 AMAI music creation technology is changing with each passing day. This article will use AI models such as ChatGPT as an example to explain in detail how to use AI to assist music creation, and explain it with actual cases. We will introduce how to create music through SunoAI, AI jukebox on Hugging Face, and Python's Music21 library. Through these technologies, everyone can easily create original music. However, it should be noted that the copyright issue of AI-generated content cannot be ignored, and you must be cautious when using it. Let’s explore the infinite possibilities of AI in the music field together! OpenAI's latest AI agent "OpenAI Deep Research" introduces: [ChatGPT]Ope
 What is ChatGPT-4? A thorough explanation of what you can do, the pricing, and the differences from GPT-3.5!May 14, 2025 am 05:00 AM
What is ChatGPT-4? A thorough explanation of what you can do, the pricing, and the differences from GPT-3.5!May 14, 2025 am 05:00 AMThe emergence of ChatGPT-4 has greatly expanded the possibility of AI applications. Compared with GPT-3.5, ChatGPT-4 has significantly improved. It has powerful context comprehension capabilities and can also recognize and generate images. It is a universal AI assistant. It has shown great potential in many fields such as improving business efficiency and assisting creation. However, at the same time, we must also pay attention to the precautions in its use. This article will explain the characteristics of ChatGPT-4 in detail and introduce effective usage methods for different scenarios. The article contains skills to make full use of the latest AI technologies, please refer to it. OpenAI's latest AI agent, please click the link below for details of "OpenAI Deep Research"
 Explaining how to use the ChatGPT app! Japanese support and voice conversation functionMay 14, 2025 am 04:59 AM
Explaining how to use the ChatGPT app! Japanese support and voice conversation functionMay 14, 2025 am 04:59 AMChatGPT App: Unleash your creativity with the AI assistant! Beginner's Guide The ChatGPT app is an innovative AI assistant that handles a wide range of tasks, including writing, translation, and question answering. It is a tool with endless possibilities that is useful for creative activities and information gathering. In this article, we will explain in an easy-to-understand way for beginners, from how to install the ChatGPT smartphone app, to the features unique to apps such as voice input functions and plugins, as well as the points to keep in mind when using the app. We'll also be taking a closer look at plugin restrictions and device-to-device configuration synchronization
 How do I use the Chinese version of ChatGPT? Explanation of registration procedures and feesMay 14, 2025 am 04:56 AM
How do I use the Chinese version of ChatGPT? Explanation of registration procedures and feesMay 14, 2025 am 04:56 AMChatGPT Chinese version: Unlock new experience of Chinese AI dialogue ChatGPT is popular all over the world, did you know it also offers a Chinese version? This powerful AI tool not only supports daily conversations, but also handles professional content and is compatible with Simplified and Traditional Chinese. Whether it is a user in China or a friend who is learning Chinese, you can benefit from it. This article will introduce in detail how to use ChatGPT Chinese version, including account settings, Chinese prompt word input, filter use, and selection of different packages, and analyze potential risks and response strategies. In addition, we will also compare ChatGPT Chinese version with other Chinese AI tools to help you better understand its advantages and application scenarios. OpenAI's latest AI intelligence
 5 AI Agent Myths You Need To Stop Believing NowMay 14, 2025 am 04:54 AM
5 AI Agent Myths You Need To Stop Believing NowMay 14, 2025 am 04:54 AMThese can be thought of as the next leap forward in the field of generative AI, which gave us ChatGPT and other large-language-model chatbots. Rather than simply answering questions or generating information, they can take action on our behalf, inter
 An easy-to-understand explanation of the illegality of creating and managing multiple accounts using ChatGPTMay 14, 2025 am 04:50 AM
An easy-to-understand explanation of the illegality of creating and managing multiple accounts using ChatGPTMay 14, 2025 am 04:50 AMEfficient multiple account management techniques using ChatGPT | A thorough explanation of how to use business and private life! ChatGPT is used in a variety of situations, but some people may be worried about managing multiple accounts. This article will explain in detail how to create multiple accounts for ChatGPT, what to do when using it, and how to operate it safely and efficiently. We also cover important points such as the difference in business and private use, and complying with OpenAI's terms of use, and provide a guide to help you safely utilize multiple accounts. OpenAI


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

EditPlus Chinese cracked version
Small size, syntax highlighting, does not support code prompt function

Zend Studio 13.0.1
Powerful PHP integrated development environment

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

Dreamweaver Mac version
Visual web development tools

