


Stereo vision and depth perception in computer vision and examples

In the fascinating world of artificial intelligence and image processing, these concepts play a key role in enabling machines to perceive the three-dimensional world around us in the same way our eyes do. Join us as we explore the technology behind stereo vision and depth perception, revealing the secrets of how computers gain understanding of depth, distance and space from 2D images.

What do stereo vision and depth perception specifically refer to in computer vision?
Stereo vision and depth perception are important concepts in the field of computer vision, which aim to imitate the human ability to perceive depth and three-dimensional structure from visual information. These concepts are often applied in fields such as robotics, autonomous vehicles, and augmented reality
Stereoscopic Vision
Stereoscopic vision, also known as stereopsis or binocular vision, It is a technology that senses the depth of a scene by capturing and analyzing images from two or more cameras placed slightly apart, mimicking the way the human eye works.
The basic principle behind stereo vision is triangulation. When two cameras (or "stereo cameras") capture images of the same scene from slightly different viewpoints, the resulting image pairs, called stereo pairs, contain the difference, or difference, in the positions of corresponding points in the two images.
By analyzing these differences, computer vision systems can calculate depth information for objects in the scene. Objects closer to the camera will have larger differences, while objects further away from the camera will have smaller differences.
Stereo vision algorithms typically include techniques such as feature matching, difference mapping, and epipolar geometry, which are used to compute a depth map or 3D representation of a scene
Depth Perception
In computer vision, depth perception refers to the system's ability to understand and estimate the distance of objects in a 3D scene from a single or multiple 2D images or video frames
Methods to achieve depth perception are not limited to stereoscopic vision , other avenues are also possible, including:
- Monocular cues: These are depth cues that can be perceived in a single camera or image. Examples include perspective, texture gradients, shadows, and occlusion. These cues can help estimate depth even in the absence of stereovision.
- LiDAR (Light Detection and Ranging): LiDAR sensors use laser beams to measure the distance of objects in a scene, providing precise depth information in the form of a point cloud. This information can be fused with visual data for more accurate depth perception.
- Structured Light: Structured light involves projecting a known pattern onto a scene and analyzing how that pattern deforms on objects in the scene. This deformation can be used to calculate depth information.
- Time of Flight (ToF) Camera: A ToF camera measures the time it takes for light to reflect from an object and return to the camera. This information is used to estimate depth.
In computer vision applications, depth perception is crucial for tasks such as avoiding obstacles, identifying objects, performing 3D reconstruction, and understanding scenes
Stereo Vision and Depth Perception Components in Computer Vision
- Stereo Camera: Stereo vision relies on two or more cameras (stereo cameras) placed at a known distance apart . These cameras capture images of the same scene from slightly different viewpoints, simulating the way the human eye perceives depth.
- Image Capture: The camera captures images or video frames of the scene. These images are often referred to as the left image (from the left camera) and the right image (from the right camera).
- Calibration: In order to accurately calculate depth information, the stereo camera must be calibrated. This process involves determining camera parameters such as intrinsic matrices, distortion coefficients, and extrinsic parameters (rotations and translations between cameras). Calibration ensures that the images from the two cameras are corrected and matched correctly.
- Correction: Correction is a geometric transformation applied to the captured image to align corresponding features on the epipolar lines. This simplifies the stereo matching process by making differences more predictable.
- Stereo matching: Stereo matching is the process of finding corresponding points or matching points between the left image and the right image. The pixel value used to calculate the difference for each pixel is called the disparity and represents the horizontal shift of the feature in the image. There are various stereo matching algorithms available, including block matching, semi-global matching, and graph cuts, for finding these corresponding points.
- Difference map: A difference map is a grayscale image in which the intensity value of each pixel corresponds to the difference or depth at that point in the scene. Objects closer to the camera have larger differences, while objects further away from the camera have smaller differences.
- Depth map: The depth map is derived from the difference map by using a known baseline (distance between cameras) and the focal length of the camera. It calculates the depth in real world units (e.g. meters) for each pixel, not the difference.
- Visualization: Depth and difference maps are often visualized to provide a human-readable representation of the 3D structure of a scene. These plots can be displayed as grayscale images or converted to point clouds for 3D visualization.
- Some hardware: In addition to cameras, you can also use specialized hardware such as depth-sensing cameras (such as Microsoft Kinect, Intel RealSense) or LiDAR (Light Detection and Ranging) sensors to obtain depth information. These sensors provide depth directly without the need for stereo matching.
Stereo vision and depth perception in computer vision Python example implementation:
import cv2import numpy as np# Create two video capture objects for left and right cameras (adjust device IDs as needed)left_camera = cv2.VideoCapture(0)right_camera = cv2.VideoCapture(1)# Set camera resolution (adjust as needed)width = 640height = 480left_camera.set(cv2.CAP_PROP_FRAME_WIDTH, width)left_camera.set(cv2.CAP_PROP_FRAME_HEIGHT, height)right_camera.set(cv2.CAP_PROP_FRAME_WIDTH, width)right_camera.set(cv2.CAP_PROP_FRAME_HEIGHT, height)# Load stereo calibration data (you need to calibrate your stereo camera setup first)stereo_calibration_file = ‘stereo_calibration.yml’calibration_data = cv2.FileStorage(stereo_calibration_file, cv2.FILE_STORAGE_READ)if not calibration_data.isOpened():print(“Calibration file not found.”)exit()camera_matrix_left = calibration_data.getNode(‘cameraMatrixLeft’).mat()camera_matrix_right = calibration_data.getNode(‘cameraMatrixRight’).mat()distortion_coeff_left = calibration_data.getNode(‘distCoeffsLeft’).mat()distortion_coeff_right = calibration_data.getNode(‘distCoeffsRight’).mat()R = calibration_data.getNode(‘R’).mat()T = calibration_data.getNode(‘T’).mat()calibration_data.release()# Create stereo rectification mapsR1, R2, P1, P2, Q, _, _ = cv2.stereoRectify(camera_matrix_left, distortion_coeff_left,camera_matrix_right, distortion_coeff_right,(width, height), R, T)left_map1, left_map2 = cv2.initUndistortRectifyMap(camera_matrix_left, distortion_coeff_left, R1, P1, (width, height), cv2.CV_32FC1)right_map1, right_map2 = cv2.initUndistortRectifyMap(camera_matrix_right, distortion_coeff_right, R2, P2, (width, height), cv2.CV_32FC1)while True:# Capture frames from left and right camerasret1, left_frame = left_camera.read()ret2, right_frame = right_camera.read()if not ret1 or not ret2:print(“Failed to capture frames.”)break# Undistort and rectify framesleft_frame_rectified = cv2.remap(left_frame, left_map1, left_map2, interpolation=cv2.INTER_LINEAR)right_frame_rectified = cv2.remap(right_frame, right_map1, right_map2, interpolation=cv2.INTER_LINEAR)# Convert frames to grayscaleleft_gray = cv2.cvtColor(left_frame_rectified, cv2.COLOR_BGR2GRAY)right_gray = cv2.cvtColor(right_frame_rectified, cv2.COLOR_BGR2GRAY)# Perform stereo matching to calculate depth map (adjust parameters as needed)stereo = cv2.StereoBM_create(numDisparities=16, blockSize=15)disparity = stereo.compute(left_gray, right_gray)# Normalize the disparity map for visualizationdisparity_normalized = cv2.normalize(disparity, None, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)# Display the disparity mapcv2.imshow(‘Disparity Map’, disparity_normalized)if cv2.waitKey(1) & 0xFF == ord(‘q’):break# Release resourcesleft_camera.release()right_camera.release()cv2.destroyAllWindows()
Note: For stereo camera settings, camera calibration is required and the calibration is saved The data is in a .yml file, put the path into the example code.
Application
Use depth information for target detection and tracking to achieve more precise positioning and identification. Utilizing depth information for virtual reality and augmented reality applications enables users to interact with virtual environments more realistically. Use depth information for face recognition and expression analysis to improve the accuracy and robustness of face recognition. Use depth information for 3D reconstruction and modeling to generate realistic 3D scenes. Use depth information for posture estimation and behavior analysis to achieve more accurate action recognition and behavior understanding. Utilizing depth information for autonomous driving and robot navigation to improve safety and efficiency in the fields of intelligent transportation and automation
- 3D scene reconstruction
- Object detection and tracking
- Autonomous Navigation of Robots and Vehicles
- Augmented and Virtual Reality
- Gesture Recognition
Limitations
Here are some important Limitations:
- # Depends on camera calibration: Stereo vision systems require precise calibration of the cameras used. Accurate calibration is critical to ensure correct calculation of depth information. Any errors in calibration can lead to inaccurate depth perception.
- Limited field of view: The stereo vision system has a limited field of view, based on the baseline distance between the two cameras. This can lead to blind spots or difficulty in perceiving objects outside the field of view of both cameras.
- Surfaces without texture and features: Stereo matching algorithms rely on finding corresponding features in the left and right images. Surfaces that lack texture or unique features, such as smooth walls or uniform backgrounds, may be difficult to match accurately, leading to depth estimation errors.
- Occlusion: Objects that occlude each other in the scene may cause difficulties with stereoscopic vision. When one object partially blocks another object, determining the depth of the occluded area can be problematic.
- Limited range and resolution: The accuracy of perceiving depth using stereo vision decreases as the distance from the camera increases. Additionally, the resolution of depth measurements decreases with distance, making the details of distant objects difficult to perceive.
- Sensitive to lighting conditions: Changes in lighting conditions, such as changes in ambient light or shadows, may affect the accuracy of stereoscopic vision. Inconsistent lighting conditions may make the correspondence between the left and right images difficult to find.
- Computing resources: Stereo matching algorithms can require extensive computing resources, especially when processing high-resolution images or real-time video streams. Real-time applications may require powerful hardware for efficient processing.
- Cost and Complexity: Setting up a stereo vision system with calibrated cameras can be expensive and time-consuming. Hardware requirements, including cameras and calibration equipment, can be a barrier for some applications.
- Inaccuracies with transparent or reflective objects: Transparent or highly reflective surfaces can cause errors in stereoscopic vision because these materials may not reflect light in a way suitable for depth perception.
- Dynamic scenes: Stereo vision assumes that the scene is static during image capture. In dynamic scenes with moving objects or camera motion, maintaining correspondence between left and right images can be challenging, leading to inaccurate depth estimation.
- Limited Outdoor Use: Stereoscopic vision systems may have difficulty in outdoor environments with bright sunlight or scenes that lack texture, such as clear skies.
In summary, stereoscopic vision and depth perception in computer vision open new possibilities for machines to interact with and understand the three-dimensional richness of our environments. As we discuss in this article, these technologies are at the core of a variety of applications, including areas such as robotics and autonomous vehicles, augmented reality, and medical imaging
The above is the detailed content of Stereo vision and depth perception in computer vision and examples. For more information, please follow other related articles on the PHP Chinese website!

 Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AM
Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AMThis article explores the growing concern of "AI agency decay"—the gradual decline in our ability to think and decide independently. This is especially crucial for business leaders navigating the increasingly automated world while retainin
 How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AM
How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AMEver wondered how AI agents like Siri and Alexa work? These intelligent systems are becoming more important in our daily lives. This article introduces the ReAct pattern, a method that enhances AI agents by combining reasoning an
 Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM
Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM"I think AI tools are changing the learning opportunities for college students. We believe in developing students in core courses, but more and more people also want to get a perspective of computational and statistical thinking," said University of Chicago President Paul Alivisatos in an interview with Deloitte Nitin Mittal at the Davos Forum in January. He believes that people will have to become creators and co-creators of AI, which means that learning and other aspects need to adapt to some major changes. Digital intelligence and critical thinking Professor Alexa Joubin of George Washington University described artificial intelligence as a “heuristic tool” in the humanities and explores how it changes
 Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AM
Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AMLangChain is a powerful toolkit for building sophisticated AI applications. Its agent architecture is particularly noteworthy, allowing developers to create intelligent systems capable of independent reasoning, decision-making, and action. This expl
 What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AM
What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AMRadial Basis Function Neural Networks (RBFNNs): A Comprehensive Guide Radial Basis Function Neural Networks (RBFNNs) are a powerful type of neural network architecture that leverages radial basis functions for activation. Their unique structure make
 The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AM
The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AMBrain-computer interfaces (BCIs) directly link the brain to external devices, translating brain impulses into actions without physical movement. This technology utilizes implanted sensors to capture brain signals, converting them into digital comman
 Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AM
Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AMThis "Leading with Data" episode features Ines Montani, co-founder and CEO of Explosion AI, and co-developer of spaCy and Prodigy. Ines offers expert insights into the evolution of these tools, Explosion's unique business model, and the tr
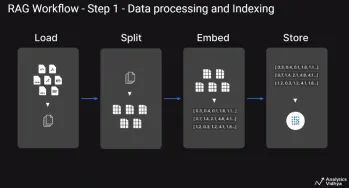 A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AM
A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AMThis article explores Retrieval Augmented Generation (RAG) systems and how AI agents can enhance their capabilities. Traditional RAG systems, while useful for leveraging custom enterprise data, suffer from limitations such as a lack of real-time dat


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

Dreamweaver Mac version
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

WebStorm Mac version
Useful JavaScript development tools

