

 Technology peripheralsAIScalableMap: Scalable map learning for online long-range vectorized high-precision map construction
Technology peripheralsAIScalableMap: Scalable map learning for online long-range vectorized high-precision map constructionScalableMap: Scalable map learning for online long-range vectorized high-precision map construction

Scalable Maps: Scalable Map Learning for Online Long-Distance Vectorized HD Map Construction
Please click the following link to read the paper: https://arxiv.org/pdf/2310.13378.pdf
Code link: https://github.com/jingy1yu/ScalableMap
The author’s unit is Wuhan University

Thesis idea:
This paper proposes a novel end-to-end process for building online long-range vectorized high-precision (HD) maps using vehicle-mounted camera sensors. Vectorized representations of high-precision maps use polylines and polygons to represent map features, which are widely used by downstream tasks. However, previous solutions designed with reference to dynamic target detection ignored the structural constraints within linear map elements, resulting in performance degradation in long-distance scenes. This article uses the attributes of map features to improve the performance of map construction. This paper extracts more accurate bird's-eye view (BEV) features under the guidance of linear structures, then proposes a hierarchical sparse graph representation to further exploit the scalability of vectorized graph elements, and designs a progressive decoding mechanism based on this representation. Supervision strategy. This article's method ScalableMap shows excellent performance on the nuScenes dataset, especially in long-distance scenes. Compared with the previous state-of-the-art model, it improves 6.5 mAP and achieves 18.3 FPS
Main contributions:
(i) This article proposes ScalableMap, the first end-to-end long-distance vector map construction pipeline. This paper utilizes the structural characteristics of mapping elements to extract more accurate BEV features, proposes HSMR based on scalable vectorized elements, and designs progressive decoders and supervision strategies accordingly. All of this results in superior long-distance map perception.
Through extensive experimental evaluation, this study tested the performance of ScalableMap on the nuScenes dataset [17]. The research method has achieved state-of-the-art results in long-distance high-precision map learning, improving 6.5 mAP over existing multi-modal methods while achieving a speed of 18.3 frames per second
Network Design :
The goal of this article is to leverage the structural properties of vectorized map elements to address the challenge of accurately detecting map elements over longer distances. First, this paper extracts position-aware BEV features and instance-aware BEV features through two branches respectively, and fuses them under the guidance of a linear structure to obtain hybrid BEV features. Next, this paper proposes a hierarchical sparse map representation (HSMR) to abstract map elements in a sparse but accurate manner. Integrating this representation with the cascade decoding layer proposed by DETR [16], this paper designs a progressive decoder that enhances the constraints of structured information by leveraging the scalability of vectorized mapping elements and a progressive supervision strategy to improve inference. accuracy. This article’s solution, ScalableMap, dynamically increases the sampling density of the map to obtain inference results at various scales, allowing this article to obtain more accurate map information faster.

Please refer to the following rewritten content: Figure 1: ScalableMap overview. (a) Structure-guided hybrid BEV feature extractor. (b) Hierarchical sparse map representation and progressive decoder. (c) Progressive Supervision

#Figure 2: Visualization of progressive polyline loss.
Experimental results:





The content that needs to be rewritten is: Rewrite the content without changing the original meaning. The language to rewrite into is Chinese. The original sentence does not need to appear
The above is the detailed content of ScalableMap: Scalable map learning for online long-range vectorized high-precision map construction. For more information, please follow other related articles on the PHP Chinese website!

 Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AM
Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AMThis article explores the growing concern of "AI agency decay"—the gradual decline in our ability to think and decide independently. This is especially crucial for business leaders navigating the increasingly automated world while retainin
 How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AM
How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AMEver wondered how AI agents like Siri and Alexa work? These intelligent systems are becoming more important in our daily lives. This article introduces the ReAct pattern, a method that enhances AI agents by combining reasoning an
 Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM
Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM"I think AI tools are changing the learning opportunities for college students. We believe in developing students in core courses, but more and more people also want to get a perspective of computational and statistical thinking," said University of Chicago President Paul Alivisatos in an interview with Deloitte Nitin Mittal at the Davos Forum in January. He believes that people will have to become creators and co-creators of AI, which means that learning and other aspects need to adapt to some major changes. Digital intelligence and critical thinking Professor Alexa Joubin of George Washington University described artificial intelligence as a “heuristic tool” in the humanities and explores how it changes
 Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AM
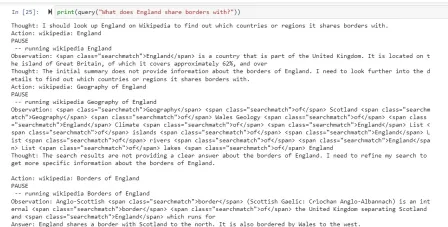
Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AMLangChain is a powerful toolkit for building sophisticated AI applications. Its agent architecture is particularly noteworthy, allowing developers to create intelligent systems capable of independent reasoning, decision-making, and action. This expl
 What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AM
What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AMRadial Basis Function Neural Networks (RBFNNs): A Comprehensive Guide Radial Basis Function Neural Networks (RBFNNs) are a powerful type of neural network architecture that leverages radial basis functions for activation. Their unique structure make
 The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AM
The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AMBrain-computer interfaces (BCIs) directly link the brain to external devices, translating brain impulses into actions without physical movement. This technology utilizes implanted sensors to capture brain signals, converting them into digital comman
 Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AM
Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AMThis "Leading with Data" episode features Ines Montani, co-founder and CEO of Explosion AI, and co-developer of spaCy and Prodigy. Ines offers expert insights into the evolution of these tools, Explosion's unique business model, and the tr
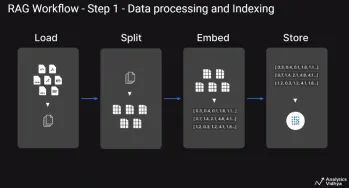 A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AM
A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AMThis article explores Retrieval Augmented Generation (RAG) systems and how AI agents can enhance their capabilities. Traditional RAG systems, while useful for leveraging custom enterprise data, suffer from limitations such as a lack of real-time dat


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

Dreamweaver Mac version
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

WebStorm Mac version
Useful JavaScript development tools

