

Scene recognition problems in UAV image processing


Scene recognition problems in drone image processing require specific code examples
The rapid development of drone technology has made it more and more widely used in various fields. Widely, one of them is image processing. The drone is equipped with a high-definition camera that can take real-time shots and videos of the surrounding environment. However, how to perform scene recognition for UAV images is still a challenging problem. This article will introduce the scene recognition problem in UAV image processing in detail and give some specific code examples.
Scene recognition refers to matching input images with known scenes to determine the current environment. It is very important for drones to accurately identify the scene they are currently in, because they can make appropriate decisions based on scene information. For example, in the field of agriculture, drones can determine the growth of crops and perform related operations based on different scenarios; in the field of search and rescue, drones can determine whether there are trapped people based on different scenarios.
In order to achieve scene recognition in drone image processing, we can use deep learning technology in the field of computer vision. Specifically, we can use Convolutional Neural Network (CNN) for image classification tasks. Through multi-layer convolution and pooling operations, CNN can extract high-level features from the input image and compare it with known scenes to obtain the final classification result.
The following is a simple scene recognition code example based on the TensorFlow framework:
import tensorflow as tf
from tensorflow.keras import layers
# 加载数据集(可以根据实际情况进行修改)
(train_images, train_labels), (test_images, test_labels) = tf.keras.datasets.cifar10.load_data()
train_labels = tf.keras.utils.to_categorical(train_labels, num_classes=10)
test_labels = tf.keras.utils.to_categorical(test_labels, num_classes=10)
# 构建模型
model = tf.keras.Sequential([
layers.Conv2D(32, (3, 3), activation='relu', input_shape=(32, 32, 3)),
layers.MaxPooling2D((2, 2)),
layers.Conv2D(64, (3, 3), activation='relu'),
layers.MaxPooling2D((2, 2)),
layers.Conv2D(64, (3, 3), activation='relu'),
layers.Flatten(),
layers.Dense(64, activation='relu'),
layers.Dense(10, activation='softmax')
])
# 编译模型
model.compile(optimizer='adam',
loss=tf.keras.losses.CategoricalCrossentropy(from_logits=True),
metrics=['accuracy'])
# 训练模型
model.fit(train_images, train_labels, epochs=10, validation_data=(test_images, test_labels))
# 使用模型进行预测
predictions = model.predict(test_images)The above code first loads the CIFAR-10 data set, which is a commonly used image classification data set, including 10 different scene categories. We then built a simple CNN model and used the Adam optimizer and cross-entropy loss function for model compilation. Next, use the training set to train the model. After training is completed, we can use the test set to predict the model.
It should be noted that the above code is just a simple example, and the actual scene recognition problem may be more complex. Therefore, according to actual needs, we can adjust and optimize the model, add more convolutional layers or fully connected layers, and even use pre-trained models for transfer learning.
To sum up, the scene recognition problem in UAV image processing is a challenging task. Through deep learning technology and appropriate data sets, we can achieve scene recognition on drone images. Through the above code examples, readers can have a preliminary understanding of the basic process of scene recognition in UAV image processing, and make corresponding modifications and optimizations according to actual needs.
The above is the detailed content of Scene recognition problems in UAV image processing. For more information, please follow other related articles on the PHP Chinese website!

 Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AM
Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AMThis article explores the growing concern of "AI agency decay"—the gradual decline in our ability to think and decide independently. This is especially crucial for business leaders navigating the increasingly automated world while retainin
 How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AM
How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AMEver wondered how AI agents like Siri and Alexa work? These intelligent systems are becoming more important in our daily lives. This article introduces the ReAct pattern, a method that enhances AI agents by combining reasoning an
 Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM
Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM"I think AI tools are changing the learning opportunities for college students. We believe in developing students in core courses, but more and more people also want to get a perspective of computational and statistical thinking," said University of Chicago President Paul Alivisatos in an interview with Deloitte Nitin Mittal at the Davos Forum in January. He believes that people will have to become creators and co-creators of AI, which means that learning and other aspects need to adapt to some major changes. Digital intelligence and critical thinking Professor Alexa Joubin of George Washington University described artificial intelligence as a “heuristic tool” in the humanities and explores how it changes
 Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AM
Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AMLangChain is a powerful toolkit for building sophisticated AI applications. Its agent architecture is particularly noteworthy, allowing developers to create intelligent systems capable of independent reasoning, decision-making, and action. This expl
 What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AM
What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AMRadial Basis Function Neural Networks (RBFNNs): A Comprehensive Guide Radial Basis Function Neural Networks (RBFNNs) are a powerful type of neural network architecture that leverages radial basis functions for activation. Their unique structure make
 The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AM
The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AMBrain-computer interfaces (BCIs) directly link the brain to external devices, translating brain impulses into actions without physical movement. This technology utilizes implanted sensors to capture brain signals, converting them into digital comman
 Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AM
Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AMThis "Leading with Data" episode features Ines Montani, co-founder and CEO of Explosion AI, and co-developer of spaCy and Prodigy. Ines offers expert insights into the evolution of these tools, Explosion's unique business model, and the tr
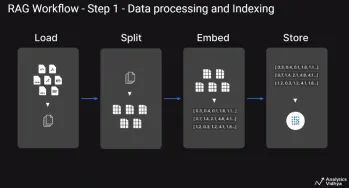 A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AM
A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AMThis article explores Retrieval Augmented Generation (RAG) systems and how AI agents can enhance their capabilities. Traditional RAG systems, while useful for leveraging custom enterprise data, suffer from limitations such as a lack of real-time dat


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Dreamweaver CS6
Visual web development tools

SAP NetWeaver Server Adapter for Eclipse
Integrate Eclipse with SAP NetWeaver application server.

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

Zend Studio 13.0.1
Powerful PHP integrated development environment

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

