
Home >Technology peripherals >AI >How to improve cluster collaboration efficiency? Chinese and foreign teams collaborate to develop a robot formation control strategy based on mean shift
How to improve cluster collaboration efficiency? Chinese and foreign teams collaborate to develop a robot formation control strategy based on mean shift

- PHPzforward
- 2023-07-14 17:50:23885browse
Consider the scenario of "crowds of people lining up to enter the elevator". If the person who goes in first is "selfish", then he will stop in place after entering the elevator, which will block the people behind him from entering the elevator. If the person in front is "selfless", then he will take the initiative to go in, so that the people behind can enter the elevator smoothly.
Inspired by this scenario, researchers developed a selfless exploration strategy. This simple strategy can greatly improve the cooperation efficiency of the robot cluster system . The result will be in 2023 Published in Nature Communications in June.

▍Introducing “selfless” exploration: making robot cooperation more efficient
Among many robot cluster systems, cluster formation control is an important and unique issue. Compared with other cluster collaboration problems, formation control has a unique technical challenge, that is, the global formation is actually a global constraint. This constraint creates a competition relationship between robots that were originally cooperative. In essence, it is this competitive relationship that brings many difficulties to formation control.
Traditional methods usually use goal allocation to solve the competition problem between robots. However, allocation-based methods have problems of fault tolerance and weak adaptability. When the assigned goals are unreasonable or some robots malfunction, the goals need to be constantly reassigned, which will lead to low efficiency.
Recently, researchers from West Lake University, Beihang University, Tsinghua University and the University of Sheffield in the UK proposed a new robot coordination control method based on the "selfless" exploration strategy. The core is based on Mean -Shift's algorithm to resolve competitive conflicts between robots: That is, when a robot predicts that it will compete with surrounding robots, it will actively abandon its current position and move to a more open area. It is called a "selfless" strategy because it can "actively" resolve conflicts.
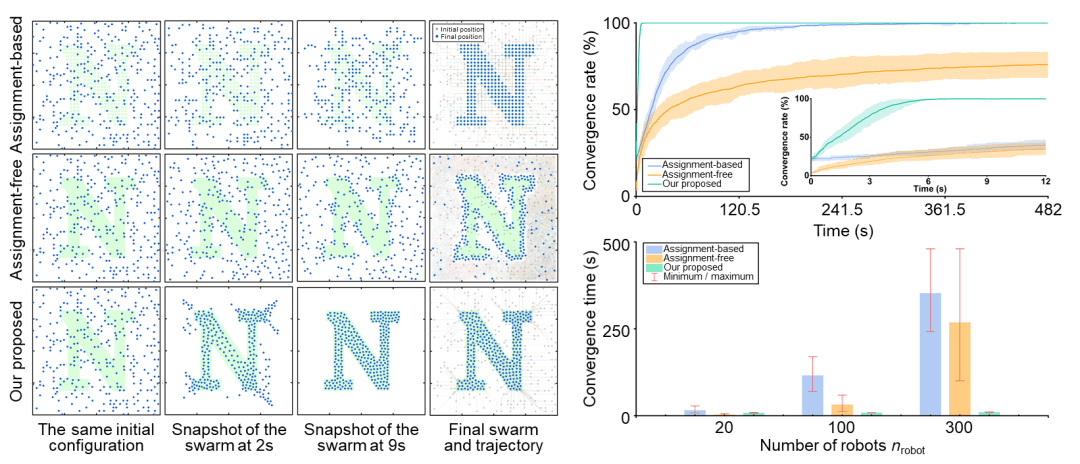
Compared with the latest research work, the efficiency of the proposed "selfless" exploration strategy can be improved dozens of times when the cluster size is large. And this improvement will increase as the cluster size increases. and further enhanced. Moreover, because it does not rely on target allocation, this strategy naturally has good fault tolerance and adaptability, and can be extended to complex space exploration, collaborative handling and other tasks.
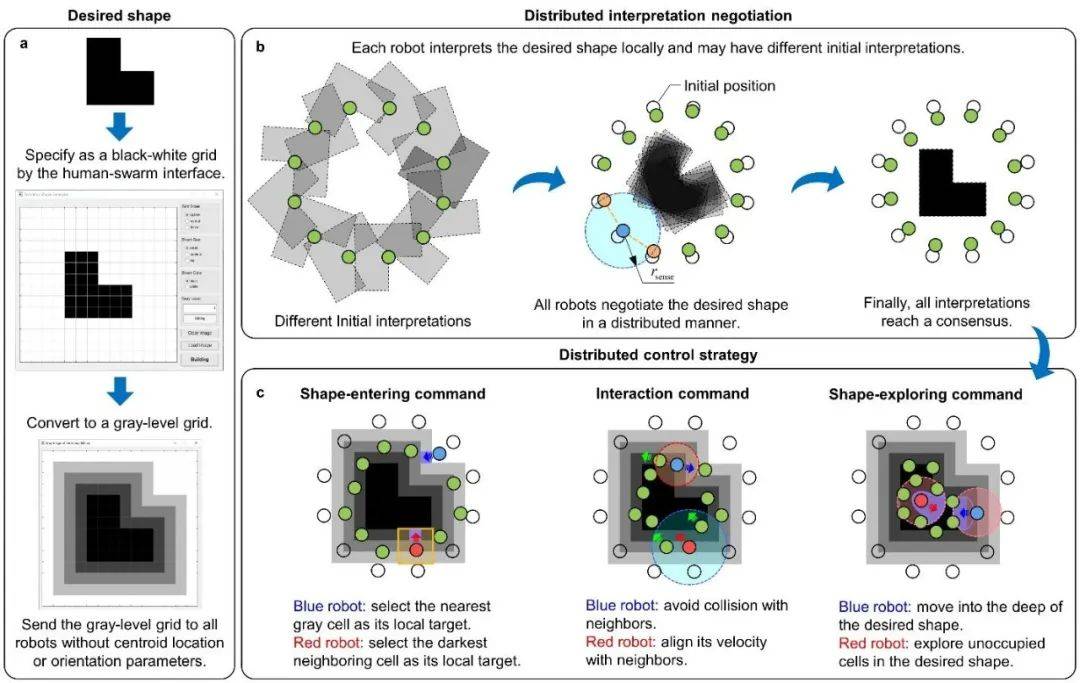
The "selfless" exploration strategy consists of three parts. The first part is the human-cluster interaction system, which is used to formulate the geometric formation required by people. The second part is a distributed negotiation algorithm. All robots negotiate the Euclidean parameters of the target formation, including position and direction, with their surrounding neighbors in a distributed manner. The third and most important part is the distributed formation control algorithm. The control algorithm consists of three control instructions. The first is the formation entry command, which is used to introduce the robot into the target formation. The second is the formation exploration command, which is used to explore the feasible area within the formation through the Mean-Shift mechanism. The third is the interactive command, which is used to achieve collision avoidance and speed alignment between robots.
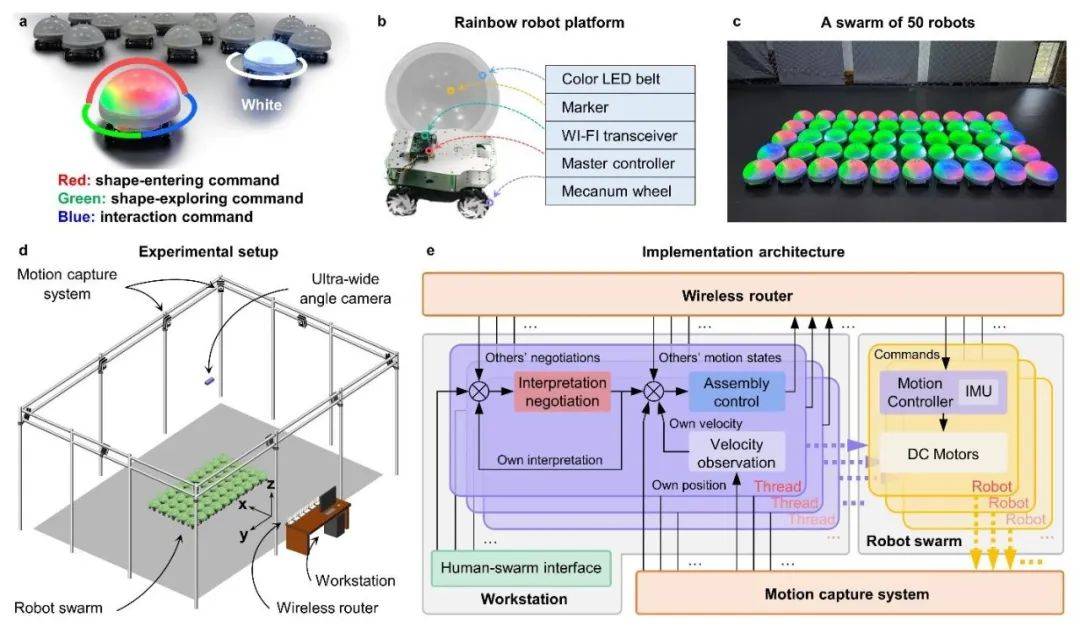
containing 50 ground robots. Relevant experiments were conducted with the support of an indoor motion capture system and implemented in a multi-threaded distributed parallel manner.
▍Robot clusters perform a variety of tasks: possessing efficient collaboration and autonomous control capabilities
The "selfless" exploration strategy cancontrol the robot's self-organization to form complex non-convex shapes. For example, a "snowflake" formation with rich branches. Under this strategy, the robot cluster can accurately realize the formation without falling into a local optimum. Moreover, robot swarms can form different non-convex formations in this way and be able to smoothly switch from one shape to another.
The "selfless" exploration strategy has dozens of times improvement in efficiency compared to the latest research work, and this improvement will be further enhanced as the cluster size increases.
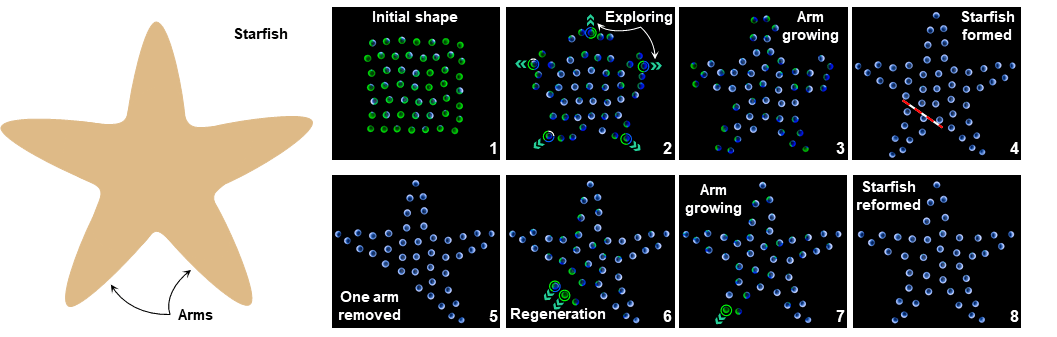
Because it is not restricted by issues such as target allocation and changes in the number of robots, the "selfless" exploration strategy has adaptive capabilities. For example, when some robots are removed from the cluster, the entire system does not require any fault detection or fault-tolerant control and can seamlessly re-form into a formation, which gives the entire system a certain degree of "regeneration" capability.
Another feature of the "selfless" exploration strategy is the ability to track time-varying formations. An important application is to realize collaborative handling of multiple robots. In this process, on the one hand, the robot must maintain the formation, and on the other hand, it must follow the leader to achieve formation movement, thereby achieving coordinated transportation of goods.
In addition, the "selfless" exploration strategy can be used to explore complex environments. For example, you can simulate a crowd of people entering a room through a narrow entrance without getting stuck at the entrance. It is worth pointing out that This example vividly explains the strategy of "selfless" exploration. It is very similar to the life scene of people entering the elevator: if many people want to enter the elevator, if a person is "selfish", then he will stop moving after entering the elevator, because he Have achieved your goal. However, this will block entry for those behind you. If this person is "selfless", then he will take the initiative to go inside, so that the people behind can enter smoothly.
Another example is that it can be used to explore complex mazes. Although there are many non-convex structures such as corners in the maze, this strategy can still successfully achieve full coverage of the maze without falling into the local optimum due to its good explorability.
▍Conclusion
The idea of the algorithm proposed in this article is very simple, but it is such a simple ideaIt solves an important problem that has long been faced in cluster formation control. In the future, the perception capabilities of the robot platform can be further expanded to make the entire system more intelligent and enable the emergence of swarm behaviors that are truly similar to highly intelligent organisms.
▍Article source
G. Sun, R. Zhou, Z. Ma, Y. Li, R. Groß, Z. Chen, and S. Zhao*, "Mean-shift exploration in shape assembly of robot swarms", Nature Communications, vol . 14, pp. 3476, 2023. https://doi.org/10.1038/s41467-023-39251-5
The above is the detailed content of How to improve cluster collaboration efficiency? Chinese and foreign teams collaborate to develop a robot formation control strategy based on mean shift. For more information, please follow other related articles on the PHP Chinese website!
Related articles
See more- Technology trends to watch in 2023
- How Artificial Intelligence is Bringing New Everyday Work to Data Center Teams
- Can artificial intelligence or automation solve the problem of low energy efficiency in buildings?
- OpenAI co-founder interviewed by Huang Renxun: GPT-4's reasoning capabilities have not yet reached expectations
- Microsoft's Bing surpasses Google in search traffic thanks to OpenAI technology