

 Technology peripheralsAIThe Chinese Academy of Sciences Software released a new CV model ViG that surpasses ViT in performance. Will it become a representative of graph neural networks in the future?
Technology peripheralsAIThe Chinese Academy of Sciences Software released a new CV model ViG that surpasses ViT in performance. Will it become a representative of graph neural networks in the future?The Chinese Academy of Sciences Software released a new CV model ViG that surpasses ViT in performance. Will it become a representative of graph neural networks in the future?

Is the network structure of computer vision about to undergo another innovation?
From convolutional neural networks to visual Transformers with attention mechanisms, neural network models treat the input image as a grid or patch sequence, but this method cannot capture the changes or complexity. object.
For example, when people observe a picture, they will naturally divide the entire picture into multiple objects, and establish spatial and other positional relationships between the objects. In other words, the entire picture is very important to the human brain. It is actually a graph, and objects are nodes on the graph.

Recently, researchers from the Institute of Software of the Chinese Academy of Sciences, Huawei's Noah's Ark Laboratory, Peking University, and the University of Macau jointly proposed a new model architecture Vision GNN (ViG) can extract graph-level features from images for vision tasks.

Paper link: https://arxiv.org/pdf/2206.00272.pdf
First, the image needs to be divided into several patches as in the figure nodes, and build a graph by connecting nearest neighbor patches, and then use the ViG model to transform and exchange the information of all nodes in the entire graph.
ViG consists of two basic modules. The Grapher module uses graph convolution to aggregate and update graph information, and the FFN module uses two linear layers to transform node features.
Experiments conducted on image recognition and object detection tasks have also proven the superiority of the ViG architecture. The pioneering research of GNN on general vision tasks will provide useful inspiration and experience for future research.
The author of the paper is Professor Wu Enhua, a doctoral supervisor at the Institute of Software, Chinese Academy of Sciences, and an honorary professor at the University of Macau. He graduated from the Department of Engineering Mechanics and Mathematics of Tsinghua University in 1970 and his PhD from the Department of Computer Science at the University of Manchester in the UK in 1980. The main research areas are computer graphics and virtual reality, including: virtual reality, photorealistic graphics generation, physics-based simulation and real-time computing, physics-based modeling and rendering, image and video processing and modeling, visual computing and machines study.
Visual GNN
Network structure is often the most critical factor in improving performance. As long as the quantity and quality of data can be guaranteed, changing the model from CNN to ViT will result in a better performance model.
But different networks treat input images differently. CNN slides the window on the image and introduces translation invariance and local features.
ViT and multi-layer perceptron (MLP) convert the image into a patch sequence, such as dividing a 224×224 image into several 16×16 patches, and finally form an input with a length of 196 sequence.

Graph neural networks are more flexible. For example, in computer vision, a basic task is to identify objects in images. Since objects are usually not quadrilateral and may have irregular shapes, the grid or sequence structures commonly used in previous networks such as ResNet and ViT are redundant and inflexible to handle.
An object can be viewed as consisting of multiple parts. For example, a person can be roughly divided into head, upper body, arms and legs.
These parts connected by joints naturally form a graphic structure. By analyzing the diagram, we can finally identify that the object may be a human.
In addition, graph is a general data structure, and grid and sequence can be regarded as a special case of graph. Thinking of an image as a graph is more flexible and efficient for visual perception.
Using the graph structure requires dividing the input image into several patches and treating each patch as a node. If each pixel is treated as a node, it will lead to too many nodes in the graph ( >10K).

# After establishing the graph, first aggregate the features between adjacent nodes through a graph convolutional neural network (GCN) and extract the representation of the image.

In order to allow GCN to obtain more diverse features, the author applies multi-head operation to graph convolution. The aggregated features are updated by heads with different weights. The final stage The connection is an image representation.

Previous GCNs usually reused several graph convolutional layers to extract aggregate features of graph data, while the over-smoothing phenomenon in deep GCNs will reduce the uniqueness of node features, resulting in The performance of visual recognition is degraded.

# To alleviate this problem, researchers introduced more feature transformations and nonlinear activation functions in the ViG block.
First apply a linear layer before and after graph convolution to project node features into the same domain to increase feature diversity. Inserting a non-linear activation function after graph convolution to avoid layer collapse.

In order to further improve the feature conversion capability and alleviate the over-smoothing phenomenon, it is also necessary to use a feedforward network (FFN) on each node. The FFN module is a simple multi-layer perceptron with two fully connected layers.

In the Grapher and FFN modules, batch normalization is performed after each fully connected layer or graph convolution layer. The stack of the Grapher module and the FFN module constitutes a ViG Blocks are also the basic unit for building large networks.
Compared with the original ResGCN, the newly proposed ViG can maintain the diversity of features. As more layers are added, the network can also learn stronger representations.
In computer vision network architecture, commonly used Transformer models usually have an isotropic structure (such as ViT), while CNN prefers to use a pyramid structure (such as ResNet).
In order to compare with other types of neural networks, the researchers established two network architectures for ViG: isotropic and pyramid.

In the experimental comparison stage, the researchers selected the ImageNet ILSVRC 2012 data set in the image classification task, which contains 1000 categories, 120M training images and 50K verification images.
In the target detection task, the COCO 2017 data set with 80 target categories was selected, including 118k training images and 5000 verification set images.

In the isotropic ViG architecture, the feature size can be kept unchanged during its main calculation process, which is easy to expand and friendly to hardware acceleration. After comparing it with existing isotropic CNNs, Transformers, and MLPs, we can see that ViG performs better than other types of networks. Among them, ViG-Ti achieved a top-1 accuracy of 73.9%, which is 1.7% higher than the DeiT-Ti model, while the computational cost is similar.

In the pyramid-structured ViG, as the network deepens, the spatial size of the feature map is gradually reduced, and the scale invariant characteristics of the image are used to generate multi-scale features at the same time.
High-performance networks mostly use pyramid structures, such as ResNet, Swin Transformer and CycleMLP. After comparing Pyramid ViG with these representative pyramid networks, it can be seen that the Pyramid ViG series can surpass or rival the state-of-the-art pyramid networks including CNN, MLP, and Transformer.
The results show that graph neural networks can complete visual tasks well and may become a basic component in computer vision systems.

In order to better understand the workflow of the ViG model, the researchers visualized the graph structure built in ViG-S. Plots of samples at two different depths (blocks 1 and 12). The pentagram is the central node and nodes with the same color are its neighbors. Only the two central nodes are visualized because drawing all the edges would look cluttered.

It can be observed that the ViG model can select content-related nodes as first-order neighbors. At shallow levels, neighbor nodes are often selected based on low-level and local features, such as color and texture. At deep levels, the neighbors of the central node are more semantic and belong to the same category. The ViG network can gradually connect nodes through their content and semantic representation, helping to better identify objects.
The above is the detailed content of The Chinese Academy of Sciences Software released a new CV model ViG that surpasses ViT in performance. Will it become a representative of graph neural networks in the future?. For more information, please follow other related articles on the PHP Chinese website!

 Gemini 2.5 Pro vs GPT 4.5: Can Google Beat OpenAI's Best?Apr 24, 2025 am 09:39 AM
Gemini 2.5 Pro vs GPT 4.5: Can Google Beat OpenAI's Best?Apr 24, 2025 am 09:39 AMThe AI race is heating up with newer, competing models launched every other day. Amid this rapid innovation, Google Gemini 2.5 Pro challenges OpenAI GPT-4.5, both offering cutting-edge advancements in AI capabilities. In this Gem
 Karun Thanks's bluepring for data science successApr 24, 2025 am 09:38 AM
Karun Thanks's bluepring for data science successApr 24, 2025 am 09:38 AMKarun Thankachan: A Data Science Journey from Software Engineer to Walmart Senior Data Scientist Karun Thankachan, a senior data scientist specializing in recommender systems and information retrieval, shares his career path, insights on scaling syst
 We Tried Gemini 2.5 Pro Experimental and It's Mind-Blowing!Apr 24, 2025 am 09:36 AM
We Tried Gemini 2.5 Pro Experimental and It's Mind-Blowing!Apr 24, 2025 am 09:36 AMGoogle DeepMind's Gemini 2.5 Pro (experimental): A Powerful New AI Model Google DeepMind has released Gemini 2.5 Pro (experimental), a groundbreaking AI model that has quickly ascended to the top of the LMArena Leaderboard. Building on its predecess
 Top 5 Code Editors to Vibe Code in 2025Apr 24, 2025 am 09:31 AM
Top 5 Code Editors to Vibe Code in 2025Apr 24, 2025 am 09:31 AMRevolutionizing Software Development: A Deep Dive into AI Code Editors Tired of endless coding, constant tab-switching, and frustrating troubleshooting? The future of coding is here, and it's powered by AI. AI code editors understand your project f
 5 Jobs AI Can't Replace According to Bill GatesApr 24, 2025 am 09:26 AM
5 Jobs AI Can't Replace According to Bill GatesApr 24, 2025 am 09:26 AMBill Gates recently visited Jimmy Fallon's Tonight Show, talking about his new book "Source Code", his childhood and Microsoft's 50-year journey. But the most striking thing in the conversation is about the future, especially the rise of artificial intelligence and its impact on our work. Gates shared his thoughts in a hopeful yet honest way. He believes that AI will revolutionize the world at an unexpected rate and talks about work that AI cannot replace in the near future. Let's take a look at these tasks together. Table of contents A new era of abundant intelligence Solve global shortages in healthcare and education Will artificial intelligence replace jobs? Gates said: For some jobs, it will Work that artificial intelligence (currently) cannot replace: human touch remains important Conclusion
 Google Gen AI Toolbox: A Python Library for SQL DatabasesApr 24, 2025 am 09:23 AM
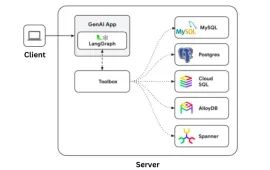
Google Gen AI Toolbox: A Python Library for SQL DatabasesApr 24, 2025 am 09:23 AMGoogle's Gen AI Toolbox for Databases: Revolutionizing Database Interaction with Natural Language Google has unveiled the Gen AI Toolbox for Databases, a revolutionary open-source Python library designed to simplify database interactions using natura
 OpenAI's GPT 4o Image Generation is SUPER COOLApr 24, 2025 am 09:21 AM
OpenAI's GPT 4o Image Generation is SUPER COOLApr 24, 2025 am 09:21 AMOpenAI's ChatGPT Now Boasts Native Image Generation: A Game Changer ChatGPT's latest update has sent ripples through the tech world with the introduction of native image generation, powered by GPT-4o. Sam Altman himself hailed it as "one of the
 How to Build Multilingual Voice Agent Using OpenAI Agent SDK? - Analytics VidhyaApr 24, 2025 am 09:16 AM
How to Build Multilingual Voice Agent Using OpenAI Agent SDK? - Analytics VidhyaApr 24, 2025 am 09:16 AMOpenAI's Agent SDK now offers a Voice Agent feature, revolutionizing the creation of intelligent, real-time, speech-driven applications. This allows developers to build interactive experiences like language tutors, virtual assistants, and support bo


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Dreamweaver CS6
Visual web development tools

WebStorm Mac version
Useful JavaScript development tools

ZendStudio 13.5.1 Mac
Powerful PHP integrated development environment

SecLists
SecLists is the ultimate security tester's companion. It is a collection of various types of lists that are frequently used during security assessments, all in one place. SecLists helps make security testing more efficient and productive by conveniently providing all the lists a security tester might need. List types include usernames, passwords, URLs, fuzzing payloads, sensitive data patterns, web shells, and more. The tester can simply pull this repository onto a new test machine and he will have access to every type of list he needs.

SublimeText3 Mac version
God-level code editing software (SublimeText3)

