



Introduction
Current research on autonomous driving strategies still focuses on implementing specific strategies in specific scenarios. Researchers from Tsinghua University are studying transportation The top conference in the field published a comprehensive review to analyze autonomous driving strategies from a more advanced perspective.
When an autonomous driving encounters an oncoming vehicle, should it pass first or wait to give way?
The strategy of autonomous driving has always been a core issue in this field, that is, how autonomous vehicles should interact reasonably and efficiently with other traffic participants in traffic conflict areas.
A strategy that is too radical or too conservative will have an impact on traffic efficiency and even pose a threat to the life safety of passengers.

Previous research on autonomous driving strategies mainly focused on low-level detailed driving behaviors or specific traffic conditions, that is, "specific analysis of specific problems", resulting in engineering codes There may be thousands of if-else, and there is currently a lack of research on advanced driving strategies.
Although researchers are showing increasing interest in driving strategies, there are still no comprehensive answers on how to proactively implement safe driving.
Recently, the results of joint research by Tsinghua University, the Institute of Automation of the Chinese Academy of Sciences and Intel China Research Institute were held in Accident Analysis and Prevention, the top international journal in the field of traffic safety (ranked No. 1 SSCI journal in the transportation field, JCR Q1) Public presentations and oral presentations were given at the 2021 annual symposium and won the journal's annual best paper award.

Paper link: https://www.sciencedirect.com/science/article/abs/pii/S0001457520317577#!
After analyzing several representative driving strategies, the author proposed three characteristic dimensions that are important for measuring driving strategies: preferred objective, risk appetite and collaborative manner.
According to these three characteristic dimensions, researchers divided the existing driving strategies of autonomous vehicles into four types: defensive driving strategy, competitive driving strategy, negotiated driving strategy and cooperative driving strategy, and analyzed The four strategies are compared and possible directions for improving the design of advanced driving strategies are identified.
The author believes that when faced with the mixed traffic flow (self-driving cars and traditional cars) that will exist for a long time, a right-of-way negotiation mechanism should be actively introduced to reconcile the contradiction between individual intentions.
The corresponding author of the paper is Dr. Li Zhiheng, who is currently an associate professor and doctoral supervisor at the Shenzhen Graduate School of Tsinghua University. Obtained a PhD in Engineering from the Department of Automation, Department of Control Science and Engineering, Tsinghua University in 2009. The main research directions are: intelligent transportation systems, traffic signal control systems, traffic management planning, intelligent public transportation systems, intelligent transportation big data research, etc. Hosted and participated in more than 10 national-level projects.
The future of autonomous driving
In recent years, autonomous driving technology has placed high hopes on it, and it is generally believed that it has the potential to reshape the entire field of road transportation and solve many practical traffic problems, such as road accessibility , transportation efficiency, convenience, and especially safety.
However, more and more researchers are gradually discovering that teaching self-driving cars to "driving safely" is not easy. Take left turns as an example. A 2010 study by the U.S. Department of Transportation examined more than 2 million accidents and found that left turns are twenty times more likely to cause accidents than right turns; the head of the behavioral team of Waymo, the giant in the autonomous driving field, Software engineer Nathaniel Fairfield believes that unprotected left turns are one of the most difficult things in autonomous driving; Professor John Leonard of the MIT Department of Mechanical Engineering also admitted that autonomous driving has many challenges every day, and left turns are almost at the top of the list of problems. .
The research team of this work believes that the essential cause of safety problems such as left-turn collisions is the differences in the macro strategies adopted by different vehicles when interacting. Different from micro-strategies that focus on specific scenarios or specific driving behaviors, macro-strategies are an abstraction of typical elements of the decision-making process and are determined by the hardware foundation of the autonomous driving strategy and the decision-making mechanism.
Therefore, this work mainly discusses what macro-strategies self-driving cars should follow to avoid collision risks caused by misjudgments during interactions with other traffic participants, so as to pass traffic conflicts in an orderly manner area.
In this work, after reviewing existing research, the research team proposed two main dimensions to measure macro-driving strategies:
- Willingness to collaborate, that is, the driving subject Whether you are willing to give up part of your individual interests in exchange for overall interests;
- Risk preference, that is, the attitude of the driving subject towards the potential risks brought by the driving strategy.
According to the different emphasis between overall interests (environmental traffic efficiency, etc.) and individual interests (cycling speed), existing typical driving strategies can be divided into two types: "confrontational driving" and "cooperative driving" kind.
Among them, according to different risk preferences, confrontational driving strategies are further divided into risk-averse "defensive driving strategies" that prefer safety indicators and risk-neutral "competitive driving strategies" that prefer speed indicators.
The cooperative driving strategy can be divided into "negotiative driving strategy" that does not rely on active communication equipment and "cooperative driving strategy" that relies on active communication equipment (Internet of Vehicles, V2V, etc.) (Figure 1) .

Figure 1: Four types of typical macro driving strategies
In this work, the research team focused on the above four typical driving strategies The operating mechanism, core tasks, interaction logic, decision-making mechanism and hardware foundation of the strategy are reviewed and analyzed.
Specifically, the defensive driving strategy is defined as: adopting irrational assumptions about other vehicles (that is, believing that the probability of irrational behavior is high), and stipulating that autonomous vehicles make independent decisions with the core purpose of ensuring their own safety. a driving strategy.
Competitive driving strategy is defined as: a driving strategy that adopts rational assumptions about other vehicles (that is, believes that the probability of irrational behavior is low) and stipulates that autonomous vehicles make independent decisions with the core purpose of improving their own efficiency. .
Negotiative driving strategy is defined as: a driving strategy in which autonomous vehicles conduct reasonable negotiations and make joint decisions with other vehicles based on the understanding of traditional driving behavior in exchange for both efficiency and safety.
Cooperative driving strategy is defined as: with the support of Internet of Vehicles technology, a driving strategy in which autonomous vehicles cooperate with other vehicles and accept unified dispatching instructions to achieve global optimization.
Then, the team further discussed the pros, cons and characteristics of these four strategies.
With the development of autonomous driving technology in this century, defensive driving strategies were first proposed because there are many similarities between this driving strategy and human driving rules. The core goals are to eliminate or reduce traffic accidents. Potential risks brought by certainty.
However, the biggest drawback of defensive driving is that in order to prevent small-probability traffic accidents, self-driving cars may be overly redundant and conservative, causing traffic efficiency to decrease.
For example, in the original version of the Responsibility Sensitive Safety (RSS) model proposed by the Intel Mobileye team [2], self-driving cars are required to maintain a safe distance far enough to cope with the possibility of the car ahead at any time. sudden braking behavior (Figure 2).
Further research by the team found that when the intentions of the vehicle in front are taken into consideration in decision-making, self-driving cars can shorten the following distance by more than three times while ensuring safety requirements. This shows that after interaction is introduced, improved defensive driving can also ensure a certain traffic efficiency.
Relevant research results have also been publicly published and adopted by Mobileye[3].

Figure 2: The provisions on safe distance in the original version of RSS released by Mobileye[2]
As the research deepens , various drawbacks of defensive driving strategies gradually emerged, such as lack of long-term planning, affecting traffic efficiency, etc.
In order to solve these problems, the concept of "learning" is gradually introduced into the field of autonomous driving. People try to teach machines to make decisions between expected benefits and potential risks based on experience, like humans.
Based on this idea, the competitive driving strategy represented by the MIT reinforcement learning model Deep Traffic (Figure 3) emerged [4].
Guided by this strategy, autonomous vehicles regard road traffic as a "non-cooperative dynamic game" process and are always looking for possibilities to improve driving efficiency.
However, this type of driving strategy is often difficult to avoid two problems:
1. The realism problem caused by simulation, that is, the "reality gap". This type of driving decision-making algorithm often needs to be carried out in a simulation system, and the training process of the algorithm is very dependent on environmental feedback. So how to ensure that the interaction process in the simulation system is realistic enough is a question that researchers must answer;
2. Increased potential risk from rational assumptions. Research has found that as training progresses, since there are far more rational individuals than irrational individuals in the simulation environment, self-driving cars may "taste the sweetness" from risky behaviors and become increasingly inclined to take radical actions. driving behavior[5]. This rational assumption may lead to traffic congestion consequences on actual roads.

Figure 3: MIT’s Deep Traffic driving decision model [4] (Image source: https://selfdrivingcars.mit.edu/deeptraffic)
Therefore, the concept of negotiated driving was proposed, which advocates the introduction of a right-of-way negotiation mechanism to reconcile conflicts between individual intentions. The research team summarized the principles that autonomous vehicles need to follow when negotiating rights of way with other vehicles into three points (Figure 4) [6]:
- The limitations of perception must be dealt with conservatively;
- The interaction between vehicles (including implicit communication and active communication) must be taken into consideration in decision-making ;
- To balance traffic safety and traffic efficiency, that is, consider the agility of the strategy.
Based on this, the research team has published multiple papers discussing how to make effective driving decisions based on right-of-way negotiation in various typical traffic scenarios [7].

Figure 4: Three core principles emphasized in safe driving [6]
However, negotiated driving is limited by the amount of communication information and has not yet reached the Maximize utilization of road capacity. With the maturity of active communication technology and the development of distributed collaborative decision-making models in recent years, global collaborative driving based on the Internet of Vehicles has become possible.
The basic assumption of collaborative driving is that all road vehicles report their status information to the central control system and fully comply with the maneuvering plan uniformly assigned by the system for motion control.
Under this assumption, self-driving cars no longer need to perform complex trajectory prediction and risk assessment. They can use optimization or search methods to maximize the utilization of road resources with the minimum computational cost (Figure 5) [8,9].

Figure 5: Comparison of delay of 20 vehicles passing the same intersection under different strategies [9]
Enumeration—Enumeration-based collaborative driving global optimal Solution (delay 315.06s);
MCTS—Search-based collaborative driving approximate optimal solution (delay 316.18s);
FIFO—rule-based negotiated driving general solution (delay 382.54s)
There are three prerequisites for the realization of the above collaborative driving: on the vehicle side, automatic driving replacement must be completed and equipped with active communication equipment; on the road side, dense intelligent infrastructure must be deployed as sensing and communication nodes ; In the cloud, a low-latency, high-concurrency communication network and control center must be established.
This also means that collaborative driving is destined to fail in the short term. We must seriously consider how to face the reality of mixed driving of self-driving cars and human-driven cars in the long term.
One worrying issue is that different self-driving car manufacturers have their own driving strategies. This may cause some self-driving cars to misjudge the strategies of other vehicles based on their own strategies, leading to accidents. Therefore, researchers call for reaching a consensus at the driving strategy level to better achieve harmonious driving and improve driving safety.
As the level of machine intelligence gradually approaches that of humans, how machines can coexist harmoniously with humans on a wider scale will become one of the most important scientific issues of this century.
In the "New Generation Artificial Intelligence Development Plan" released by our country, the guiding ideology, strategic goals and key tasks for the development of my country's new generation of artificial intelligence in 2030 are proposed. Among them, artificial intelligence for human-machine collaboration is a key research direction.
Autonomous driving, as a representative field in the development of artificial intelligence, involves human-machine collaboration in Level 2-Level 5 human-machine co-driving and Level-4-Level 5 various vehicle collaborations. Artificial intelligence research problems, the solutions to these problems involve the intersection of behavioral modeling, human-computer interaction, psychology and other disciplines, and it is necessary to receive more attention and attention.
The above is the detailed content of Comprehensive analysis of four major autonomous driving strategies. For more information, please follow other related articles on the PHP Chinese website!

 Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AM
Are You At Risk Of AI Agency Decay? Take The Test To Find OutApr 21, 2025 am 11:31 AMThis article explores the growing concern of "AI agency decay"—the gradual decline in our ability to think and decide independently. This is especially crucial for business leaders navigating the increasingly automated world while retainin
 How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AM
How to Build an AI Agent from Scratch? - Analytics VidhyaApr 21, 2025 am 11:30 AMEver wondered how AI agents like Siri and Alexa work? These intelligent systems are becoming more important in our daily lives. This article introduces the ReAct pattern, a method that enhances AI agents by combining reasoning an
 Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM
Revisiting The Humanities In The Age Of AIApr 21, 2025 am 11:28 AM"I think AI tools are changing the learning opportunities for college students. We believe in developing students in core courses, but more and more people also want to get a perspective of computational and statistical thinking," said University of Chicago President Paul Alivisatos in an interview with Deloitte Nitin Mittal at the Davos Forum in January. He believes that people will have to become creators and co-creators of AI, which means that learning and other aspects need to adapt to some major changes. Digital intelligence and critical thinking Professor Alexa Joubin of George Washington University described artificial intelligence as a “heuristic tool” in the humanities and explores how it changes
 Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AM
Understanding LangChain Agent FrameworkApr 21, 2025 am 11:25 AMLangChain is a powerful toolkit for building sophisticated AI applications. Its agent architecture is particularly noteworthy, allowing developers to create intelligent systems capable of independent reasoning, decision-making, and action. This expl
 What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AM
What are the Radial Basis Functions Neural Networks?Apr 21, 2025 am 11:13 AMRadial Basis Function Neural Networks (RBFNNs): A Comprehensive Guide Radial Basis Function Neural Networks (RBFNNs) are a powerful type of neural network architecture that leverages radial basis functions for activation. Their unique structure make
 The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AM
The Meshing Of Minds And Machines Has ArrivedApr 21, 2025 am 11:11 AMBrain-computer interfaces (BCIs) directly link the brain to external devices, translating brain impulses into actions without physical movement. This technology utilizes implanted sensors to capture brain signals, converting them into digital comman
 Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AM
Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AMThis "Leading with Data" episode features Ines Montani, co-founder and CEO of Explosion AI, and co-developer of spaCy and Prodigy. Ines offers expert insights into the evolution of these tools, Explosion's unique business model, and the tr
 A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AM
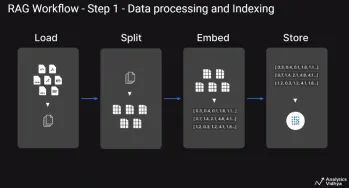
A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AMThis article explores Retrieval Augmented Generation (RAG) systems and how AI agents can enhance their capabilities. Traditional RAG systems, while useful for leveraging custom enterprise data, suffer from limitations such as a lack of real-time dat


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Dreamweaver CS6
Visual web development tools

SAP NetWeaver Server Adapter for Eclipse
Integrate Eclipse with SAP NetWeaver application server.

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

Zend Studio 13.0.1
Powerful PHP integrated development environment

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

