

 Technology peripheralsAICompared with generative models, why does robotics research still use the same old methods from a few years ago?
Technology peripheralsAICompared with generative models, why does robotics research still use the same old methods from a few years ago?Compared with generative models, why does robotics research still use the same old methods from a few years ago?

Remarkable progress has been made in the field of robotics, and these advances indicate that robots can do more things in the future. But there are also troubling things, because compared with generative models, the progress of robots is still a bit behind, especially with the emergence of models such as GPT-3, this gap is even more prominent.

Generative models produce results that are shockingly good. The left side of the picture above is the output result of Imagen launched by Google. You can provide it with a piece of text, such as "A hamster wearing an orange hat and holding a piece of paper saying I love JAX." Based on the given text, Imagen will render a reasonable image. In addition, Google also trained a large language model PaLM, which can be used to explain why jokes are funny and so on. They train models with advanced hardware such as TPUv4, and in the field of computer vision, researchers are developing some very complex architectures such as Vision Transformers.
Generative models are developing so rapidly. Compared with robotic technology, what is the connection between the two?
In this article, Eric Jang, Vice President of AI from the Norwegian robotics company “Halodi Robotics” introduces “How do we make robots more like generative models? 》. The following is the main content of the article.
As an expert in the field of robotics, the progress in the field of generative models is a bit enviable. Because in the field of robotics, most researchers are probably still using ResNet18, a 7-year-old deep learning architecture. We certainly don’t train models on huge data sets like generative models do, so very few robotics research efforts make headlines.
We know about Moravec’s Paradox: Compared with cognitive tasks, dexterous manipulation of robots is difficult. It seems intuitive that the operations of letting robots pick up and transport objects are difficult. , doesn't seem as impressive as turning words into images or explaining jokes.
First we define the generative model. Generative models are more than just rendering images or generating reams of text. It is also a framework that we can use to understand all probabilistic machine learning. There are two core questions in generative models:
#1. How many bits are there in the data category you want to model?
2. How well can you build the model?
AlexNet achieved a breakthrough in 2012. It can predict 1000 categories, and Log2 (1000 classes) is about 10 class bits. You can think of AlexNet as an image-based generative model containing 10 bits of information. If you upgrade the difficulty of the modeling task to the MS-CoCo subtitle task, the model contains approximately 100 bits of information. If you are doing image generation, for example from text to image using DALLE or Imagen, this contains approximately 1000bits of information.
Usually the more categories are modeled, the more computing power is required to calculate the conditional probabilities contained in them. This is why the model will change as the number of categories increases. huge. As we train larger and larger models, it becomes possible to exploit features in the data so that richer structures can be learned. This is why generative models and self-supervised learning have become popular methods to perform deep learning on large amounts of input without the need for extensive human labeling.
Rich Sutton pointed out in his article "The Bitter Lesson": Most of the progress in artificial intelligence seems to have been made in this computing boom, while there has been little development in other aspects. . The Vision algorithm, NLP, and Yann LeCun’s LeCake are all benefiting from this computing boom.

What enlightenment does this trend give us? If you have an over-parameterized model that can handle more data, and the model can capture all the features in the network, coupled with strong computing power and training goals, deep learning is almost always feasible.
Let DALL-E 2 generate an image: a mule riding on a huge wave. This picture shows how generative models can achieve extraordinary results with the help of computing boom. You have powerful computing power (transformer, Resnet, etc.), and you can choose VQVAE, Diffusion, GAN, Autoregressive and other algorithms for modeling. The details of each algorithm are important today, but they may not matter in the future once computers become powerful enough. But in the long run, model scale and good architecture are the foundation for all these advances.

In contrast, the figure below shows the current status of generalization research in the field of robotics. Currently, many robotics researchers are still training small models and have not yet used Vision Transformer! 
For those who engage in robot research, they all hope that robots can be more widely used in the real world and play a greater role. In the field of generative models, researchers face relatively few problems, while in the field of robotics research, they often encounter problems such as difficulty in robot deployment and noisy data, which researchers engaged in generative models will not encounter.
Next we compare generative models and robotics from three different dimensions, including optimization, evaluation, and expression capabilities.
Optimization
First let us look at a simple generative model: PixelRNN. 
Starting from the red channel of the first pixel (the a priori probability of the red channel is known), the model tells the canvas (top row) which pixel it wants to draw. The canvas will draw exactly as instructed, so it copies the pixel values onto the canvas and then reads the canvas back into the model to predict the next channel which is the green channel. Then the values on the R and G canvas are fed back to the RNN, and so on, finally generating the RGBRGBRGB... sequence.
In actual image generation tasks, diffusion or transformer can be used. But for simplicity, we only use forward-executing RNNs.
Now let’s convert the general control problem into PixelRNN. Instead of generating images, we want to generate MDPs (Markov Decision Processes): sequences of states, actions, and rewards. We want to generate an MDP that corresponds to an agent (such as a robot) that performs some task. Here too we start from prior knowledge and the model samples the initial state of the reinforcement learning (RL) environment. This is the first input to the model, the RNN samples the first pixel (A), and the canvas generates A exactly as instructed. However, unlike generating images, canvas always returns the previous RNN output, and the current operation is that the next two pixels (R, S) are determined by the current environment: i.e. it accepts the action and all previous states, and Calculate R,S somehow.

We can think of the RL environment as a painter object, which performs RNN actions instead of directly Draw what you want on the canvas, and it will draw the pixels using an arbitrarily complex function.
If we compare this to the previous PixelRNN that drew the image, this task is obviously more challenging because when you try to sample the image you want, there is a black box , this black box will make it difficult to draw content.
A typical problem encountered during the drawing process: if the environment draws an unexpected state, there will be a problem, that is, how to issue corrective instructions so that you can return to The image we are trying to draw. Additionally, unlike image generation, we actually have to generate MDP images sequentially and cannot go back for editing, which also poses optimization challenges.
If we want to understand how RL methods like PPO generalize, we should benchmark it in a non-controlled environment, apply it to image generation techniques, and compare it with modern generative models . In the 2006 work of Hinton and Nair, they used the springs system to model MNIST digital synthesis. DeepMind replicates part of this image synthesis work using RL methods.
Image generation is a great benchmark to study optimization and control because it really emphasizes the need to generalize across thousands of different scenarios.
Recent works such as Decision Transformer, Trajectory Transformer and Multi-Game Decision Transformer have shown that upside-down RL technology does a good job at generalization. So how do upside-down RL techniques compare to online (PPO) or offline RL algorithms (CQL)? It is also easy to evaluate, we can evaluate the density (likelihood model of the expert's complete observation) and verify whether a given choice of RL algorithm can generalize to a large number of images when measuring the test likelihood.
Evaluation
If we want to estimate the success rate of a robot on certain tasks, we can use the binomial distribution.
The variance of the binomial distribution is p(1-p)/N, p is the sample mean (estimated success rate); N is the number of trials. In the worst case, if p=50% (maximum variance), then 3000 samples are needed to get the standard deviation to less than 1%!
If we look at it from a computer vision perspective, improvements in the range of 0.1-1% are an important driving force for progress. The ImageNet object recognition problem has made a lot of progress since 2012. The error rate decreased by 3% from 2012 to 2014 and then by about 1% per year. There are a lot of people working on how to make this work. Perhaps this year (2022) has reached a bottleneck in benchmark improvement, but in the seven years from 2012 to 2018, researchers have made a lot of progress and results.

In other areas of generative modeling, researchers have been reducing the complexity of language models and the number of bits per dimension of the image that the generative model can Number (bits-per-dimension).


The following is a rough comparison of the evaluation speed of common benchmarks. The 2012 ImageNet object recognition test set has 150,000 images. Assuming an inference speed of 10ms per image, and evaluating each image consecutively, it would take approximately 25 minutes to evaluate each test example (actually the evaluation is much faster because batch processing is possible). But here we assume that we only have a single robot performing the evaluation operation, and the images must be processed continuously.
Because there are massive images, we can get a standard error estimate within 0.1%. We actually don't need a standard error of 0.1% to make progress in this field, maybe 1% is enough.
In terms of evaluating complexity, end-to-end performance is also an important piece. Let's take a look at how to perform end-to-end performance evaluation of neural networks in simulated tasks. Habitat Sim is one of the fastest simulators available and is designed to minimize the overhead between neural network inference and environment stepping. The simulator can do 10,000 steps per second, but since the forward pass of the neural network is about 10ms, this bottleneck results in an evaluation time of 2 seconds per episode (assuming a typical navigation episode of 200 steps). This is much faster than running a real robot, but much slower than evaluating a single computer vision sample.
If one were to evaluate an end-to-end robotic system with a level of diversity similar to what we did with ImageNet, a typical evaluation would take 1 week to process hundreds of thousands of evaluation scenarios. This is not entirely a reasonable comparison, since each episode actually has around 200 inference passes, but we cannot treat the images within a single episode as independent validation sets. Without any other episode metric, we only know whether the task was successful, so all inference within the episode only contributes to a single sample of the binomial estimate. We have to estimate success rates based on tens of thousands of episodes rather than pictures. Of course, we could try to use other policy evaluation methods, but these algorithms are not reliable enough to work out of the box.
In the next stage, we conduct on-site evaluation of the real robot. In the real world each episode takes about 30 seconds to evaluate, and if a team of 10 operators performs evaluations, each of which can complete 300 episodes per day, then about 3000 evaluations can be performed per day.
If it takes a full day to evaluate a model, this puts a huge limit on productivity because you can only try one idea per day. So we can no longer work on small ideas that incrementally improve performance by 0.1%, or very extreme ideas. We had to find a way to make a big leap in performance. While this looks good, it's difficult to do in practice.
When considering an iterative process of robot learning, it’s easy to have the number of evaluation trials far exceed your training data! Months of continuous evaluation produced approximately tens of thousands of episodes, which is already larger than most robotic deep learning demonstration datasets.

A few years ago, researchers were still solving problems like getting robotic arms to open doors, but these strategies didn’t work very well. Good generalization. Researchers typically conduct evaluations in a sequence of around 10 episodes. But 10-50 trials is actually not enough to guarantee statistical robustness. To achieve good results, more than 1000 trials may actually be performed for final evaluation.
But what happens when you extend the experiment further? If we eventually need to train an extremely general robotic system with O(100,000) behaviors, how many trials will we need to evaluate such a general system? This is where the cost of appraisal becomes extremely expensive.
I emphasize it again: the data is sufficient, but there is a bottleneck in the evaluation!

#How to speed up the evaluation?
Here are some ideas on how to speed up the evaluation of universal robotic systems.
One approach is to study the generalization problem and the robot separately. In fact, the deep learning community has already achieved this. Most computer vision and generative modeling researchers do not directly test their ideas on actual robots, but expect that once their models achieve strong generalization capabilities, they will be quickly transferred to robots. ResNets, developed in the field of computer vision, greatly simplify many robotic visual motion modeling options. Imagine if a researcher had to test their idea on a real robot every time they wanted to try a different neural network architecture! Another success story is CLIPort, which decouples the powerful multimodal generalization capabilities of image-text models from the underlying geometric reasoning for grasp planning.
We can further divide the RL technology stack into three layers: "simulated toy environment", "simulated robot" and "real robot" (arranged in order of increasing difficulty of evaluation).

At the bottom of the pyramid, there are general benchmarks, such as the benchmarks of Kaggle competitions. Going up, there is a set of "toy control problems", which study the problem in a "bare metal" way. Only the simulator and neural network are running, and all the code related to real-world robots, such as battery management, does not exist. Going further up the pyramid leads to more specific areas, more relevant to the problem you are trying to solve. For example, a "simulated robot" and a "real robot" may be used for the same task and reuse the same underlying robot code. Simulated toy environments can be used to study general algorithms, but have less overlap with the field of final robotics. At the top of the “evaluation pyramid” are the real robotic tasks we are trying to solve. Iterating this process directly is very slow, so we all want to spend as little time as possible here. We hope that base models trained and evaluated at lower levels will help understand which ideas work without having to do every evaluation at the top level.
Similarly, the field already operates in this decoupled way. Most people interested in contributing to robots will not necessarily operate robots. They may train visual representations and architectures that may eventually be useful to robots. Of course, the disadvantage of decoupling is that improvements in perceptual baselines do not always correspond to improvements in robot capabilities. For example, while the mAP metric is improving semantic segmentation or video classification accuracy, or even lossless compression benchmarks (which in theory should eventually contribute), we don't know how improvements in representation goals actually map to improvements in downstream tasks. So ultimately you have to test on the end-to-end system to understand where the real bottlenecks are.
Google once published a cool paper "Challenging Common Assumptions in Unsupervised Learning of Disentangled Representations". They proved that many completely unsupervised representation learning methods will not be used downstream. brings significant performance improvements in the task, unless we are performing evaluation and selection of models using final downstream criteria that we care about. 
Paper address: https://arxiv.org/pdf/1811.12359.pdf
Another way to reduce evaluation costs The approach is to ensure that data collection and evaluation processes are consistent. We can collect both assessment data and expert operational data simultaneously. We can collect HG-dagger data through certain interventions, so that useful training data can be collected. At the same time, the average number of interventions per episode can roughly tell us whether the strategy is good enough. We can also observe scalar metrics instead of binomial metrics because each episode of these metrics produces more information than a single success/failure.
Using RL algorithms for autonomous data collection is another way to combine assessment and data collection, but this method requires us to manually score episodes or use carefully designed reward function. All of these approaches require deploying large numbers of robots in the real world, which still gets bogged down in constant iteration in the real world.
The way to make the evaluation algorithm faster is to improve the sim-to-real migration algorithm. We can simulate many robots in parallel so there are no constraints. Mohi Khansari, Daniel Ho, Yuqing Du and others developed a technique called "Task Consistency Loss", which regularizes the representations from sim and real into invariants, so the strategy is in sim The behavior should be similar to real. When we migrate strategies evaluated in sim to real, we want to ensure that higher performance metrics in sim also indeed correspond to higher performance metrics in real. The smaller the sim2real gap, the more trustworthy the indicators in the simulation experiment.
Expressivity
Let’s see how many bits a modern generative model can output. A 64x64x3 RGB image with 8 bits per channel is 36864bits. The language model can generate any number of tokens, but if we fix the output window to 2048 tokens, each token has 17 bits, for a total of 36793 bits. Therefore, both image and text generation models can synthesize approximately 37kbits. As models become more expressive, people's perception of these models will undergo a qualitative leap. Some are even beginning to think that language models are partially conscious because they are so expressive! 
In comparison, how expressive are current robots? Here we design a simplified real-world environment. There are 6 items on the table. The robot's task is to move one item to the top of another item or transport certain items, for a total of 100 tasks. log2(100) is about 7 bits, which means "given the state of the world, the robot can move atoms to one of N states, where N can be described with 7 bits." Google’s SayCan algorithm can accomplish around 550 operations with a single neural network, which is quite impressive by current robotics deep learning standards, in only about 10 bits in total.
This comparison is not perfectly reasonable because the definition of information is different between the two. It is only provided here to provide a rough intuition when one measures a set of tasks versus The relative complexity of another set of tasks requires figuring out what is important.
One of the challenges we encountered is that the functionality of the robot is still limited. If you look at the Ego4D dataset, many tasks require two hands, but most robots today still use a wheeled base, single-arm mobile manipulator. They can't move or go anywhere, and obviously all we have is a "robot arm", which rules out a lot of interesting tasks. 
#We need to study more expressive robots, but the expressiveness of robot learning algorithms is limited by hardware. Below is a picture of the robot opening doors, packing suitcases, zipping up zippers, watering plants and flipping water bottle caps. As robotic hardware gets closer to real humans, the number of things you can do in a human-centered world grows exponentially. 
As robots become more expressive, we not only need Internet-scale training data, but also Internet-scale evaluation processes. If you look at the progress of large language models (LLMs), there are now a lot of papers looking at tuning and what existing models can and cannot do.
For example, BigBench’s benchmark compiles a series of tasks and asks what we can gain from these models. OpenAI offers Internet users the opportunity to evaluate their DALLE-2 and GPT-3 models. Their engineering and product teams can learn from user-involved AI experiments because the details of LLMs models are difficult for any one researcher to master.
Finally, a question for readers, what is the technology equivalent to GPT-3 or DALLE-2 API in the field of robotics? Through this equivalent technology, can researchers in the Internet community question robot research and understand what it can actually do?
Finally use a table to summarize the comparison between optimization, evaluation and expressivity:

The above is the detailed content of Compared with generative models, why does robotics research still use the same old methods from a few years ago?. For more information, please follow other related articles on the PHP Chinese website!

 Can SmolDocling Make Document Parsing More Efficient?Apr 23, 2025 am 09:41 AM
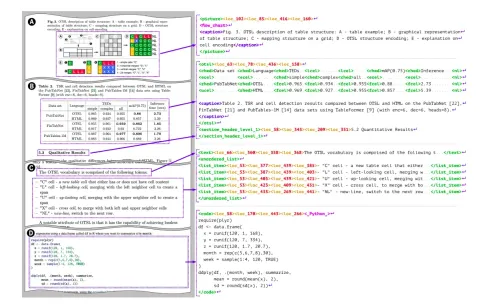
Can SmolDocling Make Document Parsing More Efficient?Apr 23, 2025 am 09:41 AMSmolDocling: A Lightweight Vision-Language Model for High-Precision Document Conversion Digital documents present a significant challenge: accurately converting their rich structure into machine-readable formats. Existing solutions, whether complex
 Can AI Cure Loneliness - or Make It Worse?Apr 23, 2025 am 09:37 AM
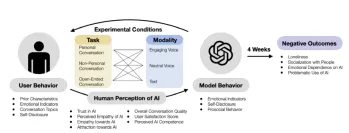
Can AI Cure Loneliness - or Make It Worse?Apr 23, 2025 am 09:37 AMThis MIT and OpenAI study explores how interacting with AI chatbots impacts users' emotions and social lives. Over four weeks, 981 adults engaged with a modified version of GPT-4, experiencing different interaction styles (text, neutral voice, engag
 Top 7 AI Image Generators to Try in 2025Apr 23, 2025 am 09:27 AM
Top 7 AI Image Generators to Try in 2025Apr 23, 2025 am 09:27 AMAI image generation technology has made great progress in 2025, from initially blurred abstract images to today's realistic photos and stunning works of art, it can do everything. This article will explore the most powerful and creative image generation models on the market today, which perform well in photoreality, creative diversity, moral implementation, and the application of various in-progress works. Digital artists, marketers, content creators, and curious people interested in these tools and their benefits are increasingly important in the digital ecosystem based on images. Table of contents Best AI Image Generators of 2025 Midjourney DALL-E 3 (OpenAI) Flux AI Stable Diffusion I
 What Are Views in SQL?Apr 23, 2025 am 09:26 AM
What Are Views in SQL?Apr 23, 2025 am 09:26 AMIntroduction SQL, the Structured Query Language, is fundamental to managing and manipulating relational databases. A powerful SQL feature is the use of views, which streamline complex queries, boosting database efficiency and manageability. This ski
 How can Simpson's Paradox Uncover Hidden Trends in Data? - Analytics VidhyaApr 23, 2025 am 09:20 AM
How can Simpson's Paradox Uncover Hidden Trends in Data? - Analytics VidhyaApr 23, 2025 am 09:20 AMSimpson's Paradox: Unveiling Hidden Trends in Data Have you ever been misled by statistics? Simpson's Paradox demonstrates how aggregated data can obscure crucial trends, revealing the importance of analyzing data at multiple levels. This concise gui
 What is Nominal Data? - Analytics VidhyaApr 23, 2025 am 09:13 AM
What is Nominal Data? - Analytics VidhyaApr 23, 2025 am 09:13 AMIntroduction Nominal data forms the bedrock of data analysis, playing a crucial role in various fields like statistics, computer science, psychology, and marketing. This article delves into the characteristics, applications, and distinctions of nomi
 What is One-Shot Prompting? - Analytics VidhyaApr 23, 2025 am 09:12 AM
What is One-Shot Prompting? - Analytics VidhyaApr 23, 2025 am 09:12 AMIntroduction In the dynamic world of machine learning, efficiently generating precise responses using minimal data is paramount. One-shot prompting offers a powerful solution, enabling AI models to execute specific tasks using just a single example
 Tesla's Robovan Was The Hidden Gem In 2024's Robotaxi TeaserApr 22, 2025 am 11:48 AM
Tesla's Robovan Was The Hidden Gem In 2024's Robotaxi TeaserApr 22, 2025 am 11:48 AMSince 2008, I've championed the shared-ride van—initially dubbed the "robotjitney," later the "vansit"—as the future of urban transportation. I foresee these vehicles as the 21st century's next-generation transit solution, surpas


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

Zend Studio 13.0.1
Powerful PHP integrated development environment

SublimeText3 English version
Recommended: Win version, supports code prompts!

