

 Technology peripheralsAICan walk on the edge of a coin! The smallest crab robot on land is launched and could be used for minimally invasive surgeries in the future
Technology peripheralsAICan walk on the edge of a coin! The smallest crab robot on land is launched and could be used for minimally invasive surgeries in the futureCan walk on the edge of a coin! The smallest crab robot on land is launched and could be used for minimally invasive surgeries in the future


This "sideways walking" micro-robot is so cute!
The May issue of Science Robotics published a study by Northwestern University. This study introduces A sub-millimeter level multi-material land robot was developed.
According to reports, this robot is inspired by a crab. Its miniature size and flexible pace allow this small robot to walk freely on the edge of a coin while being remotely controlled.
In the future, this robot can be used for confined space operations and even minimally invasive surgeries.

Paper link:
https://www.science.org/doi/10.1126/scirobotics.abn0602.
Inspired by the "Peeping Toe Crab", it is the smallest micro-robot on land
From the appearance, this robot has 8 legs, a pair of pincers, a round body and a crab Very similar, it is indeed inspired by a crab - the "Peeping Toe Crab"
John A. Rogers, the lead researcher of this study, said that their work complements other The work of scientists working on millimeter-scale robots, for example, is a worm-like structure that can move through a liquid medium with flagella.
But as far as he knows, their crab microrobot is the smallest land robot, only half a millimeter wide, that can walk on solid surfaces in the open air.

The robot is composed of three key materials: an electronic-grade polymer for the body and limbs; and shape memory alloy (SMA) that forms the "moving" parts. ;There is also a thin layer of glass that acts as an exoskeleton to increase the rigidity of the structure.
Rogers added that they are not limited by these specialty materials, however, his team is looking at ways to integrate semiconductor materials and other types of conductors.
Shape memory alloy (SMA) helps the "little crab" move
This tiny robot is able to move quickly due to the presence of shape memory alloy (SMA). This type of material undergoes a phase change at a certain temperature, causing a change in shape.
Rogers said: "So you create the material in an initial geometry, deform it, and then when you heat it, it goes back to the initial geometry... We use the shape change as some kind of mechanical actuator or The basis of some kind of muscle."

To get the memory metal to heat up, the researchers used a laser beam focused on the robot. "Whenever a laser beam illuminates the robot's shape memory alloy parts, it causes a phase change and corresponding motion," Rogers said. "When the laser beam is moved away, these parts are rapidly cooled and the limb It will return to the deformed geometry."
Therefore, laser spots scanning the robot's body can sequentially activate various joints to establish gait and direction of movement.
While this approach has its merits, Rogers wants to explore more options. "With lasers, you need some kind of optical access... (but) depending on where you want the robot to work, whether that's feasible or not," Rogers said.
Microrobotics Expert's Natural Philosophy
This is not the first time Rogers has referenced things in nature to create submillimeter-sized robots.
His lab has developed tiny structures that resemble worms and beetles, and even a winged microchip that moves passively through the air on the same principle that wind spreads seeds.
 In 2015, Rogers and his colleagues also published a paper on how to exploit the Japanese art of kirigami (such as that seen in pop-up books) They designed their robot based on the kirigami concept.
In 2015, Rogers and his colleagues also published a paper on how to exploit the Japanese art of kirigami (such as that seen in pop-up books) They designed their robot based on the kirigami concept.
They used high-fidelity, multilayer stacks of patterned materials supported by silicon wafers, but while these materials are useful for integrated circuits, they "are not good for robots," Rogers said, because they are flat. In order to bring them into the third dimension, studying the principles of Qi is a starting point.
As Rogers emphasized, their research is currently purely exploratory, trying to introduce some additional ideas into microrobotics engineering.
"We can move these robots and make them go in different directions, but they don't perform a specific task," he said.
For example, even though the crab robot has claws, these are only for visual purposes, they do not move or grasp objects. "Creating capabilities for mission execution will be the next step in research in this area," he said. Now, however, making multi-material 3D structures and using SMA for bidirectional actuation are two key parts of his team's contribution to wider research.
To explore further, he and his colleagues are considering how to increase the ability to grasp or manipulate objects at this scale and how to add microcircuitry, digital sensors and wireless communications to the robots. For example, communication between robots could allow them to work as a swarm. Another area for research is adding some kind of local power supply powered by photovoltaics, for example, to provide local heating via a microcontroller in a time-sequential manner to control movement.
In terms of potential applications, Rogers envisions microrobots being used for work in confined spaces, primarily for minimally invasive surgery, and to a lesser extent vehicles for making other micromachines. But he also advocates caution: "I don't want to overstate what we're doing. It's easy to fantasize about these robots going into the body and doing some powerful things medically. (But) that's where we want to be, and that's That’s what drives a lot of our work.”
Related coverage:
- https://spectrum.ieee.org/microrobots-walking.
- https://www.science.org/doi/10.1126/scirobotics.abn0602.
- https://www.nature.com/articles/s41586-021-03847-y.
- https://www.pnas.org/doi/full/10.1073/pnas.1515602112.
The above is the detailed content of Can walk on the edge of a coin! The smallest crab robot on land is launched and could be used for minimally invasive surgeries in the future. For more information, please follow other related articles on the PHP Chinese website!

 Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AM
Insights on spaCy, Prodigy and Generative AI from Ines MontaniApr 21, 2025 am 11:01 AMThis "Leading with Data" episode features Ines Montani, co-founder and CEO of Explosion AI, and co-developer of spaCy and Prodigy. Ines offers expert insights into the evolution of these tools, Explosion's unique business model, and the tr
 A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AM
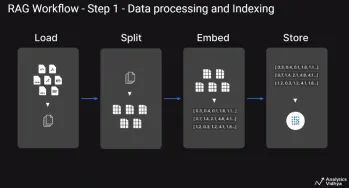
A Guide to Building Agentic RAG Systems with LangGraphApr 21, 2025 am 11:00 AMThis article explores Retrieval Augmented Generation (RAG) systems and how AI agents can enhance their capabilities. Traditional RAG systems, while useful for leveraging custom enterprise data, suffer from limitations such as a lack of real-time dat
 What are Integrity Constraints in SQL? - Analytics VidhyaApr 21, 2025 am 10:58 AM
What are Integrity Constraints in SQL? - Analytics VidhyaApr 21, 2025 am 10:58 AMSQL Integrity Constraints: Ensuring Database Accuracy and Consistency Imagine you're a city planner, responsible for ensuring every building adheres to regulations. In the world of databases, these regulations are known as integrity constraints. Jus
 Top 30 PySpark Interview Questions and Answers (2025)Apr 21, 2025 am 10:51 AM
Top 30 PySpark Interview Questions and Answers (2025)Apr 21, 2025 am 10:51 AMPySpark, the Python API for Apache Spark, empowers Python developers to harness Spark's distributed processing power for big data tasks. It leverages Spark's core strengths, including in-memory computation and machine learning capabilities, offering
 Self-Consistency in Prompt EngineeringApr 21, 2025 am 10:50 AM
Self-Consistency in Prompt EngineeringApr 21, 2025 am 10:50 AMHarnessing the Power of Self-Consistency in Prompt Engineering: A Comprehensive Guide Have you ever wondered how to effectively communicate with today's advanced AI models? As Large Language Models (LLMs) like Claude, GPT-3, and GPT-4 become increas
 A Comprehensive Guide on Building AI Agents with AutoGPTApr 21, 2025 am 10:48 AM
A Comprehensive Guide on Building AI Agents with AutoGPTApr 21, 2025 am 10:48 AMIntroduction Imagine an AI assistant like R2-D2, always ready to lend a hand, or WALL-E, diligently tackling complex tasks. While creating sentient AI remains a future aspiration, AI agents are already reshaping our world. Leveraging advanced machi
 Top 10 Platforms to Practice Data Science SkillsApr 21, 2025 am 10:47 AM
Top 10 Platforms to Practice Data Science SkillsApr 21, 2025 am 10:47 AMData Science Skill Enhancement: A Guide to Top Platforms The increasing reliance on big data analysis has made data science a highly sought-after profession. Success in this field demands a blend of technical and non-technical skills. This article
 How to Use Aliases in SQL? - Analytics VidhyaApr 21, 2025 am 10:30 AM
How to Use Aliases in SQL? - Analytics VidhyaApr 21, 2025 am 10:30 AMSQL alias: A tool to improve the readability of SQL queries Do you think there is still room for improvement in the readability of your SQL queries? Then try the SQL alias! Alias This convenient tool allows you to give temporary nicknames to tables and columns, making your queries clearer and easier to process. This article discusses all use cases for aliases clauses, such as renaming columns and tables, and combining multiple columns or subqueries. Overview SQL alias provides temporary nicknames for tables and columns to enhance the readability and manageability of queries. SQL aliases created with AS keywords simplify complex queries by allowing more intuitive table and column references. Examples include renaming columns in the result set, simplifying table names in the join, and combining multiple columns into one


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

SAP NetWeaver Server Adapter for Eclipse
Integrate Eclipse with SAP NetWeaver application server.

MinGW - Minimalist GNU for Windows
This project is in the process of being migrated to osdn.net/projects/mingw, you can continue to follow us there. MinGW: A native Windows port of the GNU Compiler Collection (GCC), freely distributable import libraries and header files for building native Windows applications; includes extensions to the MSVC runtime to support C99 functionality. All MinGW software can run on 64-bit Windows platforms.

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

