
Heim >Technologie-Peripheriegeräte >KI >Atemberaubend! ! ! End-to-End-Demonstrationsvideoanalyse von Tesla
Atemberaubend! ! ! End-to-End-Demonstrationsvideoanalyse von Tesla

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2024-03-06 12:20:031280Durchsuche
Ein Benutzer hat ein Video von Tesla FSD v12 im Internet gepostet und jemand hat es auf Seite B verschoben:
https://www.bilibili.com/video/BV1Z6421M797www.bilibili.com/video/BV1Z6421M797
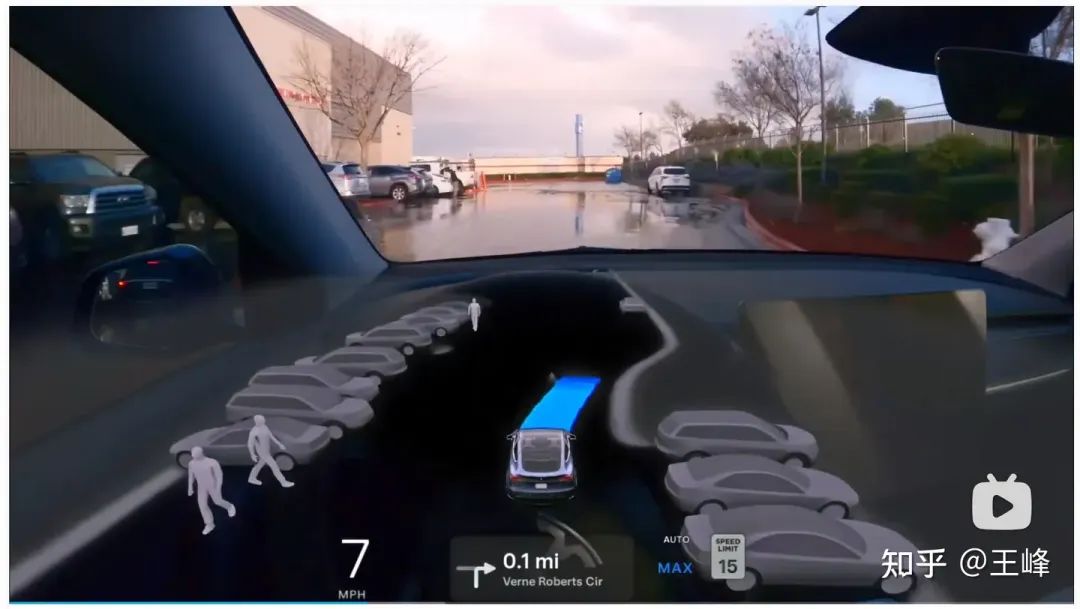
Diesmal Es handelt sich um eine rein visuell komplexe Szene: Es regnet und es gibt Wasser auf dem Boden, und verschiedene Muster spiegeln sich auf dem Wasser, was zu seltsamen visuellen Effekten führen kann. Tesla hat letztes Jahr keine KI-Tag-Veranstaltung abgehalten, angeblich weil die Konkurrenten oft ihre Ausfälle provozierten, und hat sie deshalb einfach abgesagt. Da keine Details vorliegen, bietet das Ansehen des Videos einen Einblick in einige der End-to-End-Funktionen. Lassen Sie uns als Nächstes einige der interessanten Punkte analysieren.
01:57, habe fälschlicherweise erkannt, dass die Autotür offen war, und habe einen großen Umweg gemacht:

Das ist hier kein großes Problem, auf der linken Seite ist relativ viel Platz, also spielt es keine Rolle wenn du noch etwas länger herumläufst.
02:09, Fehlerkennung von Occ führte fast zu einem Stopp:

Die Fußgänger sind weg, wir können losfahren. Allerdings befand sich auf dem Boden viel stehendes Wasser, das das Bild des Objekts reflektierte, was zu Fehlerkennungen führen konnte, also hielten wir an und warteten eine Weile, bevor wir weitergingen.
04:40, das Nahbereichs-Einschaltfahrzeug wurde übersehen


Das sehr nahbereichsrückwärts einschneidende Fahrzeug auf der linken Seite wurde übersehen, die Planung schien aber nicht die Absicht dazu zu geben Start, der das Ende widerspiegelt. Ein großer Vorteil von End-to-End: Die Ergebnisse von Upstream-Fehlern führen nicht zwangsläufig zu falschem Fahrverhalten. Weitere ähnliche Beispiele werden wir später sehen.
05:37 Fehlerkennung von Occ

Dies kann auch ein Occ sein, der durch Wasseransammlungen auf dem Boden verursacht wurde. Ich habe dieses Ergebnis durchgehend akzeptiert und das Lenkrad nach links und rechts gedreht, manchmal auch nach links und manchmal auch nach rechts.
05:48, OCC-Fehlerkennung im Nahbereich links und rechts

Es gab eine Fehlerkennung von OCC an einer sehr nahen Position links und rechts. Wer sich trotzdem an die Regeln hält, muss sich möglicherweise melden es zu übernehmen (nicht unbedingt, schließlich ist es kein Fahren auf der Strecke), hier ignoriere ich diese beiden OCCs direkt von Ende zu Ende und fahre weiter.
06:57, Fußgänger-Fehlerkennung aus nächster Nähe vor Ihnen

Das ist wirklich cool, ein Fußgänger erscheint im Gesicht, alle regelbasierten Steuerungen werden zu diesem Zeitpunkt definitiv bremsen + alarmieren, aber das Ende Das End-End-Modell erkennt die Upstream-Ergebnisse nicht und läuft wie gewohnt.
14 Punkte: Ich drehte mich auf einem privaten Parkplatz und konnte nicht raus
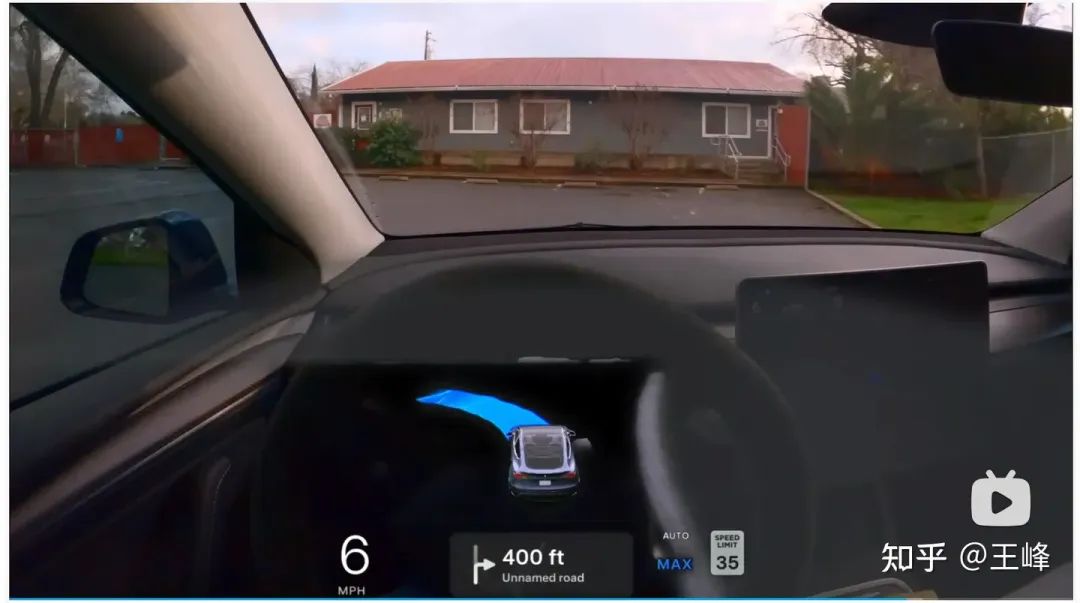
Dies könnte an der unzureichenden Reichweite des BEV liegen. Ich konnte die Ausfahrt nicht finden und drehte mich auf einem Parkplatz . .
In den anderen Clips dreht sich alles um das Fahren auf der Hauptstraße. Auf der Hauptstraße ist die Leistung von FSD v12 sehr flüssig, es gibt kein großes Problem, insbesondere die Erkennung von Fahrspurlinien bei Nacht ist auch sehr stabil, aber ich denke Die meisten Hersteller können auch dieses Niveau erreichen, ich werde es nicht viel erwähnen.
Wenn man sich nur den Abschnitt des Parkplatzes ansieht und sich die Upstream-Ergebnisse nicht ansieht, ist die Flugbahn von FSD v12 immer noch relativ, abgesehen von der Fehlerkennung des vorderen OCC, die dazu führte, dass sich das Lenkrad nach links und rechts drehte reibungslos, und selbst wenn es Fehler gibt, gibt es keine Situation, in der es hängen bleibt. In einer solchen Szene mit Fußgängern, sich unregelmäßig bewegenden Hindernissen (Trolleys) und Wasser auf dem Boden ist die Leistung tatsächlich in Ordnung.
Tesla verwendet immer noch Multitasking-End-to-End mit Zwischenmodulüberwachung, sodass das Front-End weiterhin die Ergebnisse von obj det und occ anzeigen kann. Die End-to-End-Regelung akzeptiert jedoch nicht unbedingt die vorgelagerten Ergebnisse. Eine verpasste Erkennung aus nächster Nähe muss nicht unbedingt zu einem Start und einem Unfall führen, und eine falsche Erkennung aus nächster Nähe muss nicht unbedingt dazu führen, dass das Fahrzeug anfährt Alle Ergebnisse werden zur umfassenden Beurteilung in den PNC eingegeben. Dies ist in der Tat ein interessanter Punkt. Sicher ist, dass Musk nicht lügt. Dies ist tatsächlich die Leistung eines End-to-End-Systems.
Das obige ist der detaillierte Inhalt vonAtemberaubend! ! ! End-to-End-Demonstrationsvideoanalyse von Tesla. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Ein Artikel über autonome Fahrentscheidungssysteme
- Tesla nutzt künstliche Intelligenz, um das autonome Fahren zu verbessern
- Plötzlich! Li Feifeis Lehrling Karpathy ist zurückgetreten. Wird Teslas autonomes Fahren ausgesetzt?
- Sie können an der Sicherheit des autonomen Fahrens zweifeln, aber Big Data sagt Ihnen: Es fährt tatsächlich besser als Sie
- Autonome Fahrtechnologie und intelligente Transportsystempraxis in Java implementiert