
Heim >Technologie-Peripheriegeräte >KI >Horizon veröffentlicht den Open-Source-Algorithmus Sparse4D und kommt damit dem durchgängigen autonomen Fahren einen Schritt näher
Horizon veröffentlicht den Open-Source-Algorithmus Sparse4D und kommt damit dem durchgängigen autonomen Fahren einen Schritt näher

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2024-01-24 12:00:141057Durchsuche
Am 22. Januar wird Horizon die Sparse4D-Reihe rein visueller Algorithmen für autonomes Fahren als Open Source veröffentlichen, um mehr Entwickler in der Branche zu ermutigen, sich an der Erforschung modernster Technologierichtungen wie durchgängiges autonomes Fahren und spärliche Wahrnehmung zu beteiligen. Derzeit wurde der Sparse4D-Algorithmus auf der GitHub-Plattform gestartet. Entwickler können dem offiziellen Horizon GitHub-Konto „Horizon Robotics“ folgen, um den Quellcode zu erhalten.
Sparse4D ist eine Reihe von Algorithmen zur langfristigen spärlichen 3D-Zielerkennung, die zur Kategorie der temporalen Multi-View-Fusion-Sensing-Technologie gehört. Angesichts des Branchenentwicklungstrends zur spärlichen Wahrnehmung hat Sparse4D ein reines Sparse-Fusion-Wahrnehmungsframework entwickelt, um den Wahrnehmungsalgorithmus effizienter und präziser zu gestalten und das Wahrnehmungssystem einfacher zu gestalten. Im Vergleich zum dichten BEV-Algorithmus reduziert Sparse4D die Rechenkomplexität, durchbricht die Beschränkung der Rechenleistung auf den Wahrnehmungsbereich und übertrifft den dichten BEV-Algorithmus in Bezug auf Wahrnehmungseffekt und Argumentationsgeschwindigkeit. Sowohl in der rein visuellen 3D-Erkennungs- als auch in der 3D-Tracking-Liste von nuScenes belegte Sparse4D den ersten Platz und wurde SOTA, vor den neuesten Methoden wie SOLOFusion, BEVFormer v2 und StreamPETR.
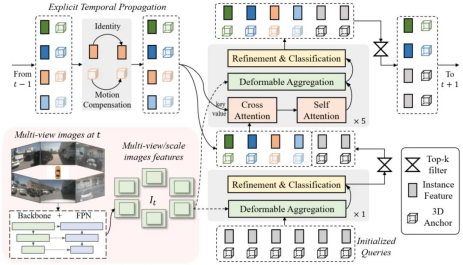
Sparse4D-Algorithmus-Architektur
Nach drei Iterationsversionen hat das Horizon Sparse4D-Team technische Probleme wie die Verbesserung der Leistung des Sparse-Algorithmus, die Reduzierung der Komplexität der zeitlichen Fusionsberechnung und das Erreichen von End-to- erfolgreich überwunden. Zielverfolgung beenden. Kürzlich haben sie einen Artikel mit dem Titel „Sparse4D v3: Advancing End-to-End 3D Detection and Tracking“ veröffentlicht, in dem sie ihre Forschungsergebnisse detailliert beschreiben. Durch die Verwendung von Horizon-Geschäftsdaten zur Leistungsüberprüfung hat das Sparse4D-Team die Computerlösung Horizon Journey 5 erfolgreich implementiert. Künftig soll die Sparse4D-Technologie den Plänen zufolge in den Produkten der nächsten Generation von Horizon zum Einsatz kommen. Das Erreichen dieses Ergebnisses wird die Entwicklung von Horizon weiter vorantreiben.
Dr. Yu Yinan, Vizepräsident von Horizon und Präsident der Softwareplattform-Produktlinie, wies darauf hin, dass die aktuelle Branche in die Ära der End-to-End-Erkennung eingetreten ist und nur ein Netzwerk die gesamte Erfassung vervollständigen kann Aufgabe. Er glaubt, dass die Algorithmen der Sparse4D-Reihe die Leistung von Sparse-Algorithmen auf ein neues Niveau verbessert und erfolgreich eine durchgängige Verfolgung mehrerer Ziele erreicht haben. Dies ist sowohl für die spärliche Wahrnehmung als auch für das durchgängig autonome Fahren von großer Bedeutung und kann als Meilenstein bezeichnet werden. Horizon hat sich entschieden, Sparse4D als Open-Source-Lösung für die gesamte Branche bereitzustellen, in der Hoffnung, gemeinsam mit herausragenden Entwicklern der Branche Fortschritte zu erzielen.
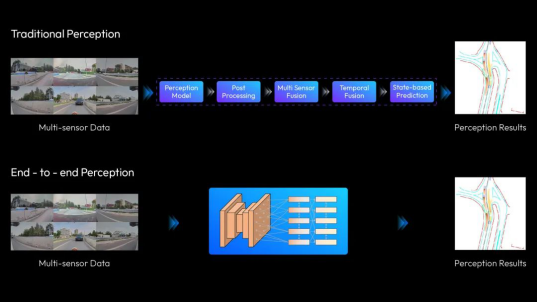
Vergleich zwischen traditionellem Wahrnehmungssystem und End-to-End-Wahrnehmungssystem
Ein weiteres Beispiel für die aktive Beteiligung von Horizon am Aufbau eines Open-Source-Software-Ökosystems für intelligentes Fahren ist die Open-Source-Algorithmenreihe Sparse4D . Dieser Algorithmus hat großes Anwendungspotenzial bei der Umsetzung rein visuellen, durchgängig autonomen Fahrens. Darüber hinaus verfügt Horizon auch über führende Open-Source-Technologien wie den VAD-Algorithmus und den MapTR-Algorithmus, die die Entwicklung der Branche weiter vorantreiben werden. Es wird erwartet, dass der Sparse4D-Algorithmus breite Aufmerksamkeit und Verwendung bei Branchenentwicklern finden wird. Die kontinuierlichen Bemühungen von Horizon werden den Entwicklungsprozess der Branche beschleunigen.
Horizon verfolgt das Konzept, unabhängig innovative Technologien, bahnbrechende Produkte und Lösungen in den kommerziellen Wert ökologischer Partner in der Smart-Car-Industrie umzuwandeln und so der Entwicklung der Branche Vitalität zu verleihen. Durch enge Zusammenarbeit, offene Integration und kooperative Innovation mit allen Parteien der Branche ist Horizon bestrebt, die Quelle lebendigen Wassers für das Ökosystem der intelligenten Automobilindustrie zu werden und ihm nachhaltige Entwicklungsimpulse zu verleihen. Horizon ist sich voll und ganz bewusst, dass die Massenproduktion autonomen Fahrens einen wichtigen Durchbruch darstellt. Daher werden wir weiterhin Open Source nutzen und die Implementierung und Massenproduktion modernster Technologien beschleunigen. Wir sind fest davon überzeugt, dass die Zukunft der Win-Win-Zusammenarbeit mit der Branche umfassender sein wird, und Horizon wird weiterhin hart daran arbeiten, zum Wohlstand der Smart-Car-Industrie beizutragen.
Das obige ist der detaillierte Inhalt vonHorizon veröffentlicht den Open-Source-Algorithmus Sparse4D und kommt damit dem durchgängigen autonomen Fahren einen Schritt näher. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Wie viel wissen Sie über die Trägheitsnavigationstechnologie für autonomes Fahren?
- Analyse der globalen Positionierungstechnologie basierend auf Merkmalspunkten beim autonomen Fahren
- Erforschung zukünftiger autonomer Fahrtechnologie: 4D-Millimeterwellenradar
- Sie können an der Sicherheit des autonomen Fahrens zweifeln, aber Big Data sagt Ihnen: Es fährt tatsächlich besser als Sie
- Waymo und Uber gestalten ihre Partnerschaft neu, um gemeinsam die Anwendung autonomer Fahrtechnologie im Bereich Online-Ride-Hailing zu erforschen