
Heim >Technologie-Peripheriegeräte >KI >Der humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden
Der humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2024-01-11 18:33:04996Durchsuche
Laut dem offiziellen OpenHarmony-Konto gab Lejus „Kuafu“-Roboter heute bekannt, dass er die Kompatibilitätsbewertung der OpenHarmony 3.2 Release-Version bestanden hat
Berichten zufolge wurde Kuafu Robot gemeinsam von Shenzhen Kaihong und Leju Robot Technology Co., Ltd. (kurz „Leju“) entwickelt und wird als „der erste inländische Open-Source-Hongmeng mit der Fähigkeit zu springen und sich an das Weitergehen anzupassen“ bezeichnet verschiedene Gelände „Humanoider Roboter“
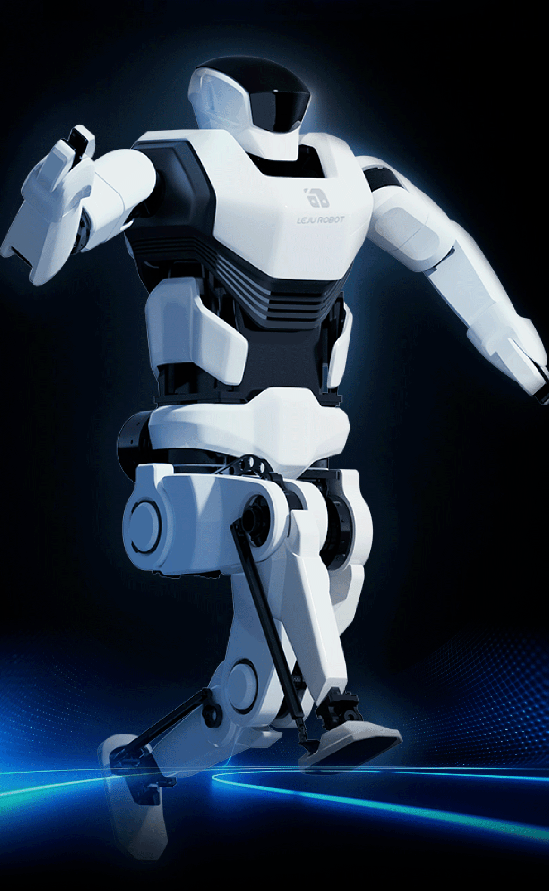
▲ Bildquelle Offizielle Leju-Website (dasselbe unten)
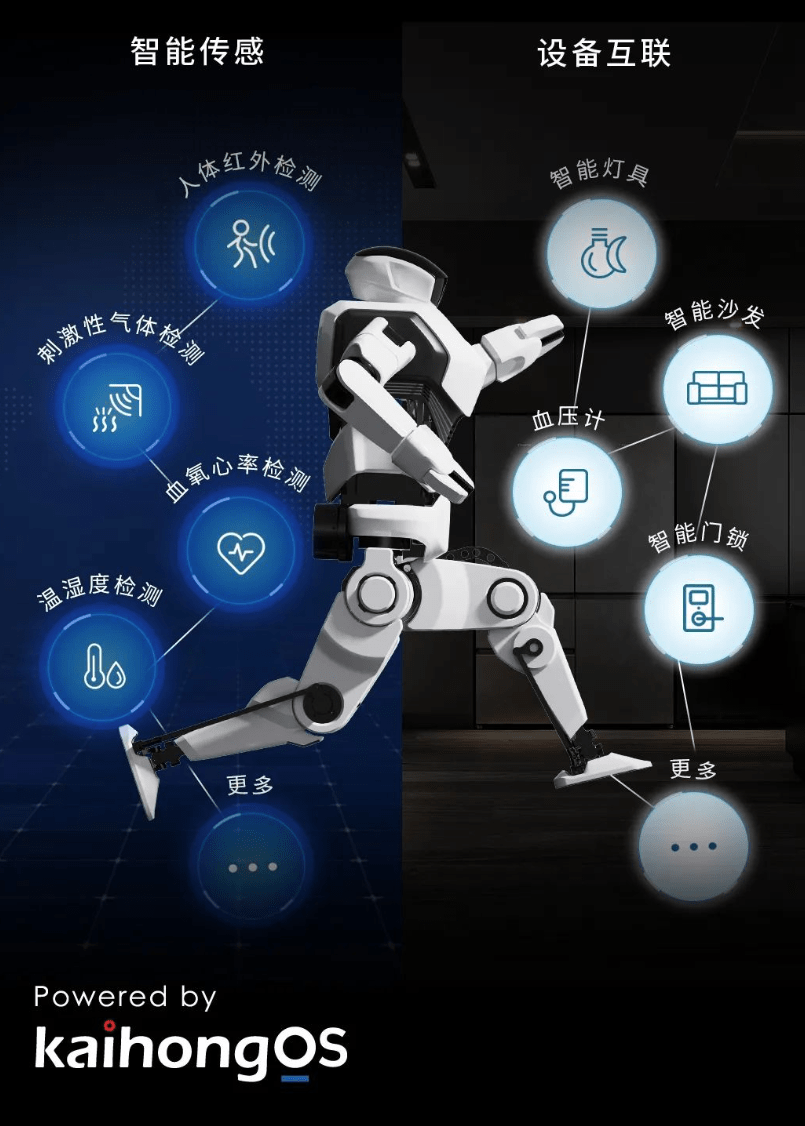
IT Home erfuhr aus den Nachrichten, dass der Roboter mit dem von Shenzhen Kaihong entwickelten Betriebssystem KaihongOS ausgestattet ist, das auf dem Open-Source-System Hongmeng basiert. Es verfügt über ein Full-Stack-Open-Source-Design und die Bewegungssteuerung ist vollständig Open Source. Der Roboter kann mit Modulen wie Flugbahnplanung, Feedback-Steuerung und Zustandsschätzung verbunden werden und sein Gangalgorithmus behauptet, dass er sich an verschiedene Untergründe, einschließlich Sand, Gras und Hindernisse, anpassen kann und bis zu 20 Zentimeter weit springen kann
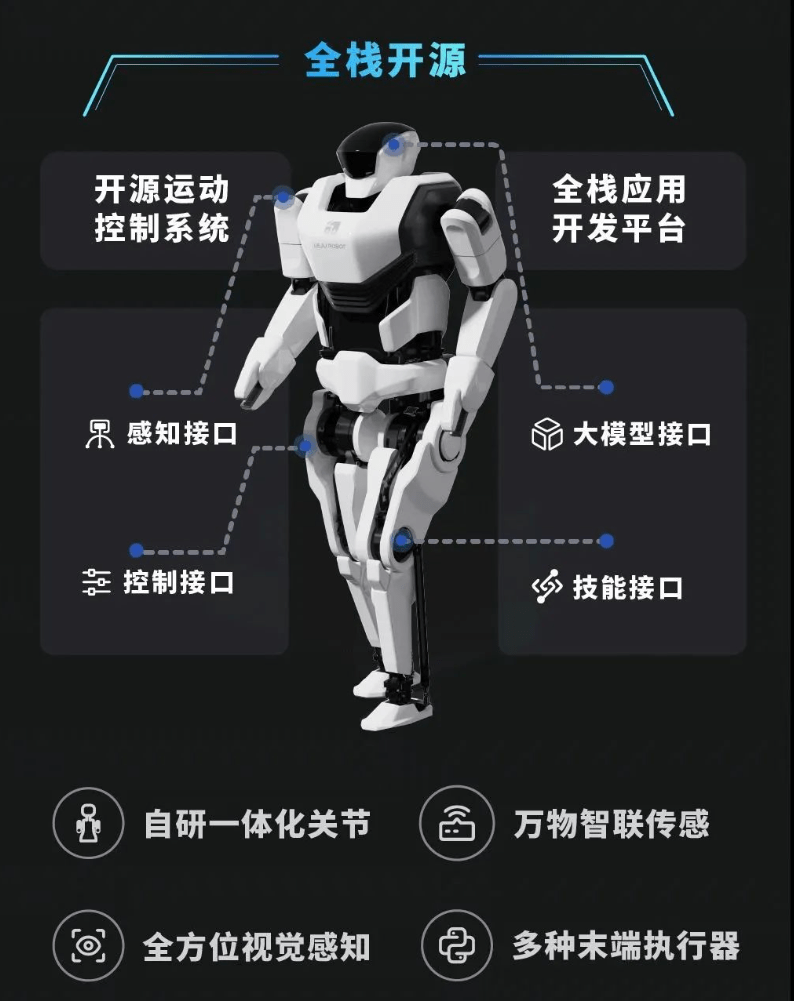
In Bezug auf die Wahrnehmung kann dieser Roboter mit verschiedenen Kaihong-Sensoren ausgestattet werden und ist mit einer Tiefenkamera ausgestattet. Es kann auch mit einer Vielzahl von Endzubehörteilen für die Sekundärentwicklung verwendet und mit gängigen Großmodellen verbunden werden
Das obige ist der detaillierte Inhalt vonDer humanoide Roboter „Kuafu' von Leju hat die OpenHarmony 3.2-Kompatibilitätsprüfung bestanden. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr