
Heim >Technologie-Peripheriegeräte >KI >In einem Artikel wird darüber gesprochen, wie die Sensoren des ADAS-Systems angeordnet werden sollten
In einem Artikel wird darüber gesprochen, wie die Sensoren des ADAS-Systems angeordnet werden sollten

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-05-05 10:49:061602Durchsuche
Dieser Artikel stellt zunächst die Bedeutung der Sensorplatzierungsstrategie in fortschrittlichen Fahrassistenzsystemen vor und schlägt Sensortypen für fortschrittliche Fahrassistenzsysteme vor, darunter vorausschauende Smart-Kameras, vorwärts und seitlich gerichtete Millimeterwellenradare (77 GHz/22 GHz) und Ultraschall Radare Neben der Rundumsichtkamera wird eine kurze Erläuterung der Leistungsmerkmale jedes Sensors gegeben. Anschließend werden am Beispiel der Lösung eines aktuellen Massenproduktionslieferanten verschiedene Sensorleistungsparameter im Detail vorgestellt, darunter Erfassungsabstand, Erfassungsbereich und Anforderungen an die externe Layoutumgebung. In diesem Artikel werden die Funktionen vorgestellt, die allein durch den Einsatz verschiedener Sensoren an Fahrzeugen erreicht werden können, sowie die Fusionsstrategien verschiedener Sensoren mit unterschiedlichen Fahrassistenzniveaus und unterschiedlichen Funktionskombinationen. Abschließend wird vorgestellt, wie verschiedene Sensoren sinnvoll am Fahrzeug installiert werden können. Basierend auf den erforderlichen Leistungsanforderungen und der Redundanz des Erfassungsbereichs wird ein spezifischer Implementierungsplan vorgeschlagen und dessen Layoutanforderungen im Detail analysiert und erläutert.
... Das Auto ist in den autonomen Fahrstufen SAE J3016TM als autonomes Fahren der Stufe 5 eingestuft. Autonomes Fahren nutzt eine Vielzahl von Sensoren (Ultraschallradar, Millimeterwellenradar, intelligente Kameras, hochauflösende/Standardauflösungskameras, Lidar usw.). Wang Tian et al. führten Untersuchungen zu den wichtigsten Sensoren durch und Millimeterwellenradar im autonomen Fahrwahrnehmungssystem Einführung. Yuan Xiuzhen analysierte die Branche der autonomen Fahrzeugsensorik und erläuterte wichtige Hardwareanwendungen wie Lidar, Kameras, Ultraschallsensorik usw. In der Entwicklungswertschöpfungskette für autonomes Fahren konzentriert sich die Entwicklung von Sensorteilen hauptsächlich auf in- und ausländische Autoteilelieferanten, während die Integration von Fahrzeugfunktionen durch den OEM erfolgt. 
 Zhang Yanyong und andere schlugen einen Fusionsalgorithmus für autonomes Fahren vor, der auf multimodaler Fusion basiert. Viele Ingenieure neigen dazu, ihre Entwicklungsbemühungen auf die Algorithmenentwicklung und das Systemdesign zu konzentrieren, aber was häufig vorkommt, ist, dass die verwendeten Sensorhardware- und Softwarestrategien Erfolgreich ist der Effekt bei einigen OEM-Modellen sehr gut, bei anderen OEMs ist der Effekt jedoch durchschnittlich oder sogar negativ. Denn bei der Forschung und Entwicklung des autonomen Fahrens ist die Berücksichtigung aller Zusammenhänge unerlässlich. Als Closed-Loop-Entwicklung basiert ein guter Algorithmus auf der genauen Erkennung der Sensor-Front-End-Erkennung. Verschiedene Arten von Hardware-Sensoren stellen unterschiedliche Anforderungen an die Sensorerkennungsleistung. Ein besonders wichtiger Punkt, der sich auf die Erkennungsleistung auswirkt, ist die Platzierung und Platzierung der Sensoren . Weg. Dieser Artikel gibt eine kurze Einführung in die Layoutmethode basierend auf den Erkennungsleistungsmerkmalen der Sensoren, die üblicherweise beim autonomen Fahren verwendet werden.
Zhang Yanyong und andere schlugen einen Fusionsalgorithmus für autonomes Fahren vor, der auf multimodaler Fusion basiert. Viele Ingenieure neigen dazu, ihre Entwicklungsbemühungen auf die Algorithmenentwicklung und das Systemdesign zu konzentrieren, aber was häufig vorkommt, ist, dass die verwendeten Sensorhardware- und Softwarestrategien Erfolgreich ist der Effekt bei einigen OEM-Modellen sehr gut, bei anderen OEMs ist der Effekt jedoch durchschnittlich oder sogar negativ. Denn bei der Forschung und Entwicklung des autonomen Fahrens ist die Berücksichtigung aller Zusammenhänge unerlässlich. Als Closed-Loop-Entwicklung basiert ein guter Algorithmus auf der genauen Erkennung der Sensor-Front-End-Erkennung. Verschiedene Arten von Hardware-Sensoren stellen unterschiedliche Anforderungen an die Sensorerkennungsleistung. Ein besonders wichtiger Punkt, der sich auf die Erkennungsleistung auswirkt, ist die Platzierung und Platzierung der Sensoren . Weg. Dieser Artikel gibt eine kurze Einführung in die Layoutmethode basierend auf den Erkennungsleistungsmerkmalen der Sensoren, die üblicherweise beim autonomen Fahren verwendet werden.
Einführung in die Sensoren des fortschrittlichen FahrassistenzsystemsDas fortschrittliche Fahrassistenzsystem (ADAS) nutzt Sensoren, um die Umgebung während der Fahrt in Echtzeit zu erfassen, Daten zu sammeln, die Fusion zu erfassen und anhand der erfassten Datenanalyse Entscheidungen zu treffen. und schließlich das Fahrzeug steuern und den Fahrer frühzeitig warnen.
Kameras können umfangreiche Umgebungsinformationen erhalten, einschließlich Objektfarbe, -form, -material usw., und die 2D-Computervision hat große Fortschritte gemacht. In diesem Bereich gibt es viele fortschrittliche Algorithmen zur Signallichterkennung, Objektklassifizierung usw. Millimeterwellenradar kann genaue Entfernungsinformationen erhalten, verfügt über eine starke Durchdringungsfähigkeit, kann dem Einfluss von Wetter- und Umweltveränderungen widerstehen und kann die Erfassung und Erkennung über große Entfernungen realisieren.
Derzeit gibt es 4 Arten von Sensoren in serienmäßig hergestellten autonomen Fahrzeugen, mit einer Gesamtzahl von 22 (Tabelle 1).
Intelligente Kameras mit Frontsicht: Üblicherweise werden Einzel-, Doppel- und Dreifachkameras verwendet. Sie werden hauptsächlich in Szenen mit mittlerer und großer Distanz eingesetzt. Sie können klare Fahrspurlinien, Verkehrszeichen, Hindernisse und Fußgänger erkennen Es erfordert außerdem eine komplexe Algorithmenunterstützung und stellt relativ hohe Anforderungen an den Prozessor.
Tabelle 1 Sensorklassifizierung des erweiterten Fahrassistenzsystems
Millimeterwellenradar: Es gibt zwei Haupttypen: 24-GHz-Radar für die Messung mittlerer und kurzer Entfernungen und 77-GHz-Radar für die Messung großer Entfernungen. Millimeterwellenradar kann effektiv Tiefenschärfe- und Geschwindigkeitsinformationen extrahieren, Hindernisse identifizieren und hat eine gewisse Fähigkeit, Nebel, Rauch und Staub zu durchdringen. Da Millimeterwellen jedoch auf die Positionierung von Schallwellen angewiesen sind erscheinen diffus reflektiert. Dadurch sind die Fehlerkennungsrate und die Fehlerquote relativ hoch.
Ultraschallradar: Wird hauptsächlich in Kurzstreckenszenarien verwendet, um Ultraschallwellen zu senden und reflektierte Ultraschallsignale zu empfangen und die Erkennungsergebnisse an die Steuerung zu senden. Der Energieverbrauch von Ultraschallwellen ist langsam, die Durchdringung ist stark, die Methode zur Entfernungsmessung ist einfach und die Kosten sind niedrig. Bei der Entfernungsmessung bei hohen Geschwindigkeiten gibt es jedoch gewisse Einschränkungen. Wenn ein Auto mit hoher Geschwindigkeit fährt, kann die Ultraschallentfernungsmessung nicht mit den Echtzeitänderungen des Abstands zwischen den Autos mithalten, und der Fehler ist groß. Ultraschallwellen haben einen großen Streuwinkel und eine schlechte Richtwirkung. Bei der Messung entfernter Ziele sind ihre Echosignale relativ schwach, was die Messgenauigkeit beeinträchtigt. Bei Messungen über kurze Entfernungen haben Ultraschall-Entfernungssensoren jedoch große Vorteile.
Rundumsichtkamera: Wird hauptsächlich in Kurzstreckenszenen verwendet, kann Hindernisse erkennen, reagiert jedoch sehr empfindlich auf äußere Bedingungen wie Licht und Wetter, ausgereifte Technologie und niedrige Temperaturen Preis. Mit der kontinuierlichen Weiterentwicklung und dem Fortschritt der Technologie nehmen die Pixel der Kameras schrittweise zu, von anfänglich 300.000 Pixeln auf derzeit 1 Million Pixel. In den nächsten drei Jahren werden 2-Millionen-Pixel-Kameras populär.
Konfigurationskombination der Sensorimplementierungsfunktion
Durch die Kombination verschiedener Sensoren des fortschrittlichen Fahrassistenzsystems können unterschiedliche Funktionen erreicht werden, wie oben beschrieben Alle 22 Im gesamten Fahrzeug sind Sensoren verbaut, die ADASL1/L2/L3 realisieren können. Die detaillierten Unterfunktionen werden im Folgenden vorgestellt.
Vorwärts gerichtete Smart-Kamera und nach vorne gerichtetes Millimeterwellenradar
Vorwärts gerichtete Smart-Kamera implementiert AEB-C (Automatische Notbremsung) Auto), LDW (Spurverlassenswarnung), LKA (Spurhalteassistent), TSR (Verkehrszeichenerkennung) und erreichen Fahrassistenzniveau L1. Die tatsächliche Erkennung des Straßenzustands ist genau (z. B. Fahrspurlinien, Tunnel, Rampen, Geschwindigkeitsbegrenzungen usw.), die Entfernungserkennung ist jedoch nicht genau. Die repräsentativen Leistungsparameter sind in Tabelle 2 aufgeführt.
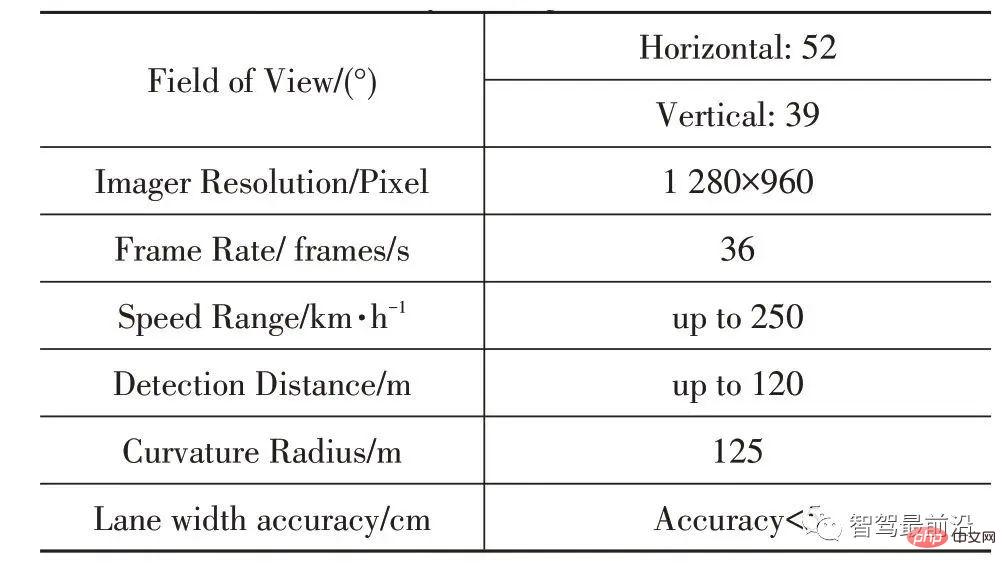
Tabelle 2 Einige Leistungsparameter von Mobileye EYEQ3#🎜 🎜 #
Forward-Millimeterwellenradar (77 GHz) realisiert ACC (Adaptive Cruise), AEB-C (Automatic Emergency Braking – Car), FCW (Forward Collision Warning) und erreicht L1-Fahrhilfsbetrieb. Die Entfernungserkennung ist genau, kann jedoch die tatsächlichen Bedingungen (z. B. Fahrspurlinien, Tunnel, Rampen, Geschwindigkeitsbegrenzungen usw.) nicht vorhersagen. Die repräsentativen Leistungsparameter sind in Tabelle 3 aufgeführt. #🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜 ## 🎜🎜##Tabelle 3 Einige Leistungsparameter von AC1000#🎜🎜 ## 🎜🎜 ## 🎜🎜 # Die nach vorne gerichtete Smart-Kamera und das nach vorne gerichtete Millimeterwellenradar sind integriert, um ACC, AEB-C/P (automatische Notbremsung – Fahrzeug/Person), LDW, LKA, TSR, TJA ( Stauassistent), ICA (Intelligent Cruise Assist), der eine Fahrassistenz auf L2-Niveau erreichen kann (Abbildung 1). Entfernungs- und Straßeninformationen sind alles zusammengeführte Daten und die Erkennung ist genau. Der Vergleich von Einzelradar, Einzelkamera und Fusionslösung ist in Tabelle 4 dargestellt.
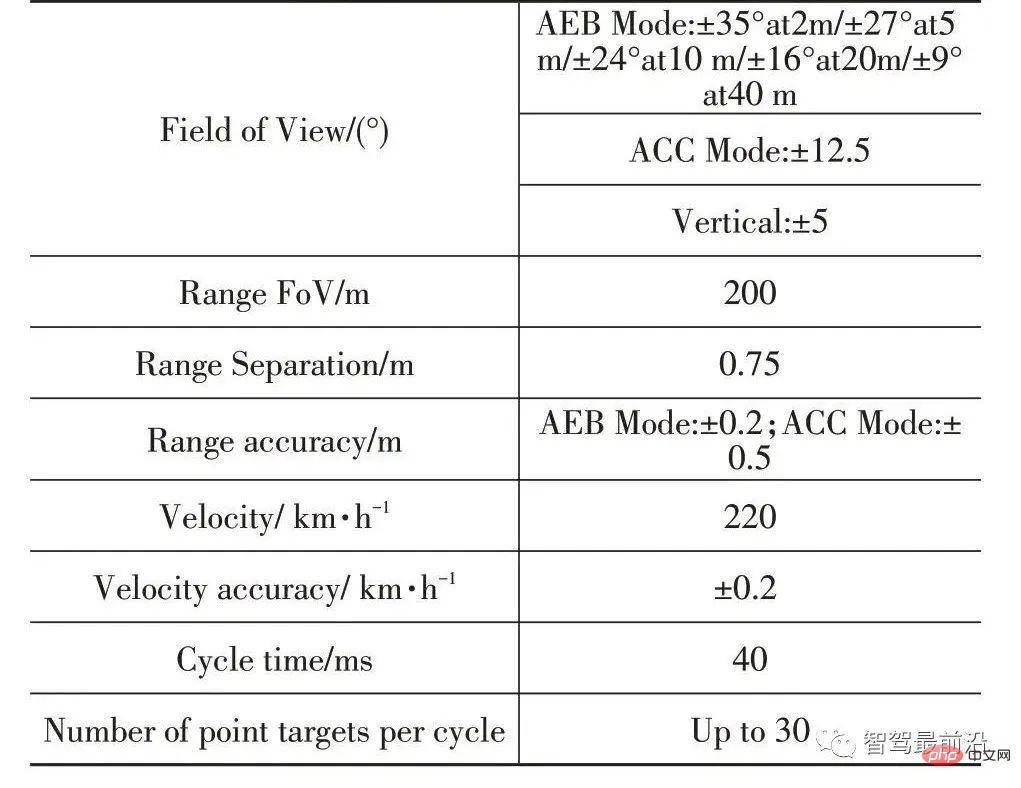
Tabelle 4 Vergleich von Einzelradar-, Einzelkamera- und Fusionslösungen #🎜 🎜#
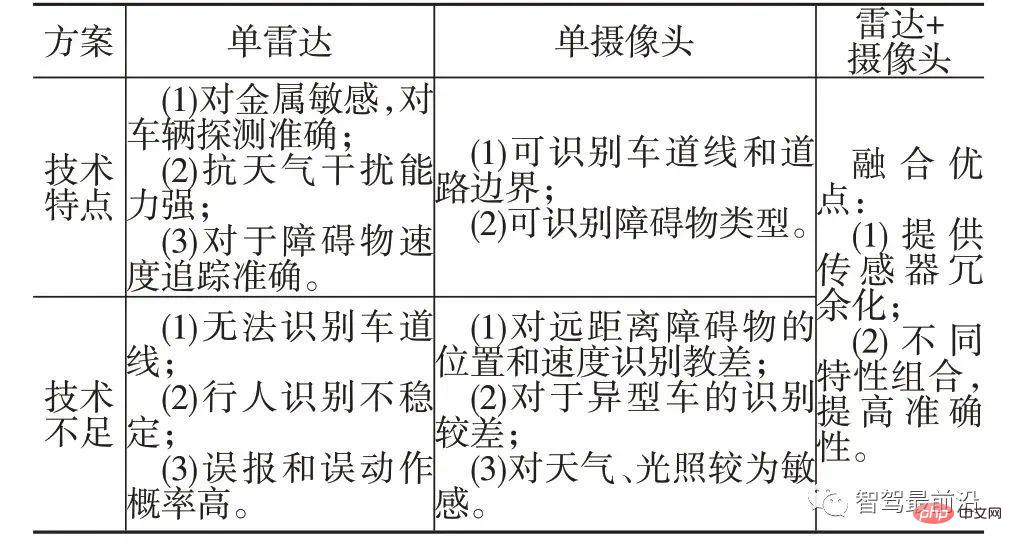 Abbildung 1 Fusion von Vorwärts-Smart-Kamera und Vorwärts-Millimeterwellenradar
Abbildung 1 Fusion von Vorwärts-Smart-Kamera und Vorwärts-Millimeterwellenradar
Seitengerichtetes Millimeterwellenradar (Winkelradar)
Seitengerichtetes Millimeterwellenradar (24 GHz) implementiert die Funktion zur Überwachung der toten Zone, und es gibt zwei Implementierungsmethoden. 2-Millimeterwellen-Radargeräte auf der Rückseite, die die Funktionen BSD (Toter-Winkel-Überwachung), LCW (Spurwechsel-Kollisionswarnung), RCTA (Rückfahrwarnung) und DOW (Türöffnungswarnung) realisieren; 2 auf der Vorderseite Ein Millimeterwellenradar kann zusätzlich zur Realisierung der oben genannten Funktionen auch FCTA (Forward Cross Traffic Alert) realisieren und erweiterte Fahrassistenzfunktionen über L2-Ebene unterstützen. Mit dem Fortschritt von Wissenschaft und Technologie verbessert sich auch die Leistung des lateralen Millimeterwellenradars allmählich, siehe Tabelle 5.

Tabelle 5 Teilparameter und Entwicklung des seitlich gerichteten Millimeterwellenradars
Seitlich gerichtetes Millimeterwellenradar (4), vorwärtsgerichtetes Millimeterwellenradar (1), vorwärts gerichtete Smart-Kamera (1) können in Kombination verwendet werden, um autonomes Fahren auf L2+- (oder L3-)-Niveau zu erreichen. Beim autonomen Fahren auf L2-Ebene sind TJA/HWAML (Highway Driving Assist – Multi-lane), ALC (Active Lane Change Assist), TLC (Triggered Lane Change Assist), ELK (Emergency Lane Keeping) und ESA (Emergency Steering Assist) vorhanden hinzugefügt), JA (Kreuzungsassistent), Rundumwarnung (einschließlich BSD/DOW/RCTA/FCTA/LCW) (Abbildung 2). Es kann eine automatische Fahrfunktion unter Autobahnbedingungen realisieren.
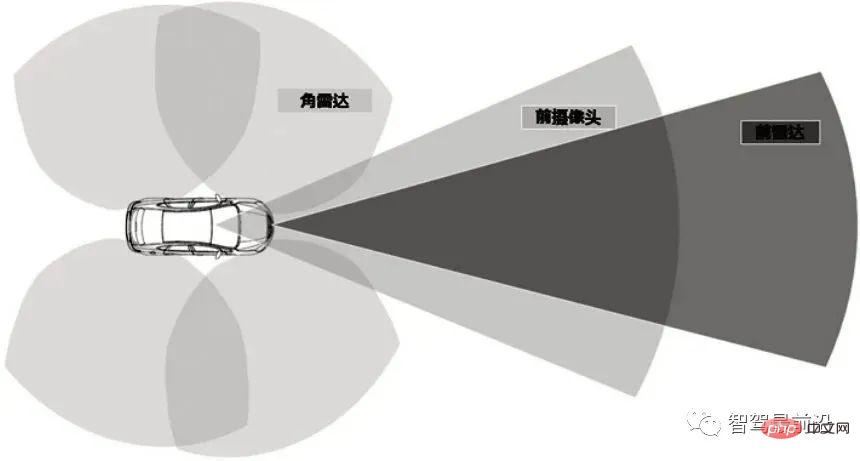
Abbildung 2 Fusion von Vorwärtskamera, Vorwärts-Millimeterwellenradar und Winkelradar
Ultraschallradar
Entsprechend den Eigenschaften der Kurzstreckenerkennung von Zielen durch Ultraschallradar (Tabelle 6), Ultraschallradar basiert auf verschiedenen Mengenkombinationen und kann die Funktionen PDC (Rückfahrradar), APA (automatischer Parkassistent) und BSD (Toter-Winkel-Überwachung) realisieren. An der hinteren Stoßstange sind vier Ultraschallradare installiert, um die PDC-Funktion zu realisieren. Einige Fahrzeuge verfügen über vier Ultraschallradare gleichzeitig an der vorderen Stoßstange (insgesamt 8 Ultraschallradare vorne und hinten), um beim Rückwärtsfahren Hindernisse vor sich zu erkennen. An den Seiten der vorderen und hinteren Stoßstangen sind vier Ultraschallradare installiert, um die Funktion zur Überwachung des toten Winkels im Nahbereich zu realisieren. Gleichzeitig können in Kombination mit 8 Ultraschallradargeräten vorne und hinten insgesamt 12 Ultraschallradare realisiert werden APA-Funktion. Wird zur Umsetzung der BSD-Funktion seitlich am Fahrzeug ein Millimeterwellen-Winkelradar verbaut, entfällt der seitliche Einbau des Ultraschallradars. Der Hauptgrund für die Installation von Ultraschallradar durch BSD ist der Kostenvorteil. Die verschiedenen Kombinationen und Funktionen des Ultraschallradars sind in Abbildung 3 dargestellt.
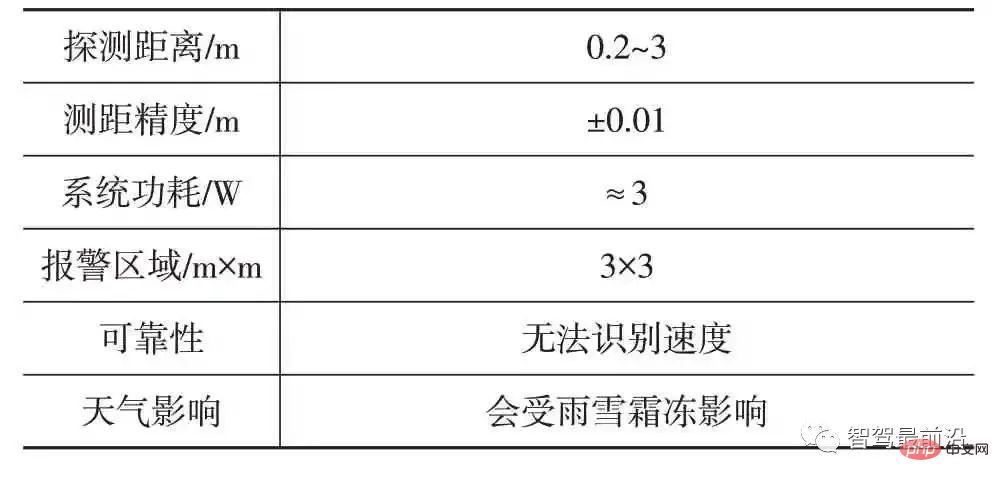
Tabelle 6 Einige Parameter und Eigenschaften von Ultraschallradar
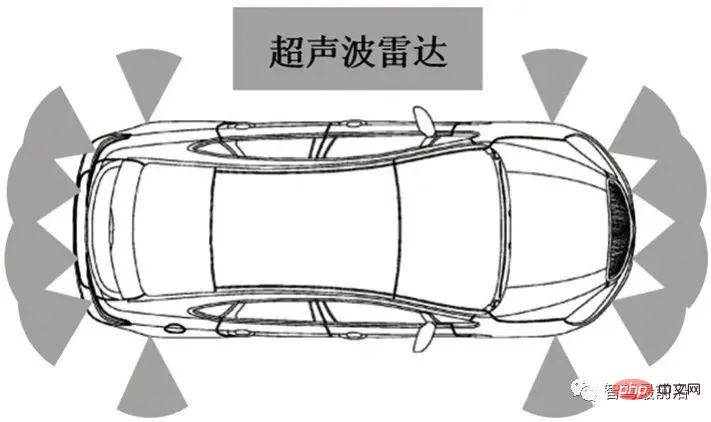
Abbildung 3 Layout der Ultraschallradarlösung
Rundumsichtkamera
Überwachungsbildgebungssystem vom Typ AVM) durch die vorne und hinten Die vier linken und rechten Bildsensoren (Rundumsichtkameras) sammeln Daten über die Umgebung des Fahrzeugs und übertragen die Bilder über CVBS (Standard Definition)/LVDS (High Definition) an den Panoramabild-Controller. Wenn am Heck nur eine Kamera verbaut ist, kann die Rückfahrbildfunktion realisiert werden. Wenn vier Kameras vorne, hinten, links und rechts gleichzeitig installiert sind, wird eine Verzerrungskorrektur und ein Zuschneiden der Eingabebilder der vier Kameras erreicht, um eine Integration von vier Ansichten und 2D-Draufsichtseffekten sowie eine Integration der 3D-Rotation zu erreichen Effekte (HD-Lösung) und schließlich Anzeige über MP5. Einige wichtige Parameter der Rundumsichtkamera sind in Tabelle 7 dargestellt, ihre Anordnung ist in Abbildung 4 des gesamten Fahrzeugs dargestellt.
Sensor-Fahrzeuglayout-Fusion
Bei der kombinierten Anordnung verschiedener Sensoren des fortschrittlichen Fahrassistenzsystems müssen Abdeckung und Redundanz berücksichtigt werden. Die Erfassungsbereiche verschiedener Sensoren haben ihre eigenen Vorteile und Einschränkungen. Der aktuelle Entwicklungstrend besteht darin, die Sensorinformationsfusionstechnologie zu nutzen, um die Mängel eines einzelnen Sensors auszugleichen und die Sicherheit und Zuverlässigkeit des gesamten intelligenten Fahrsystems zu verbessern. Abdeckung: 360° der Fahrzeugkarosserie müssen abgedeckt werden. Je nach Wichtigkeit ist die Erkennungsentfernung vorne länger (120 m), die Erkennungsentfernung hinten etwas kürzer (80 m) und die Erkennungsentfernung eingeschaltet die linke und rechte Seite ist am kürzesten (20 m). Um die Sicherheit zu gewährleisten, muss jeder Bereich mit zwei oder mehr Sensoren zur gegenseitigen Überprüfung abgedeckt werden. Abbildung 5 zeigt den Lageplan.
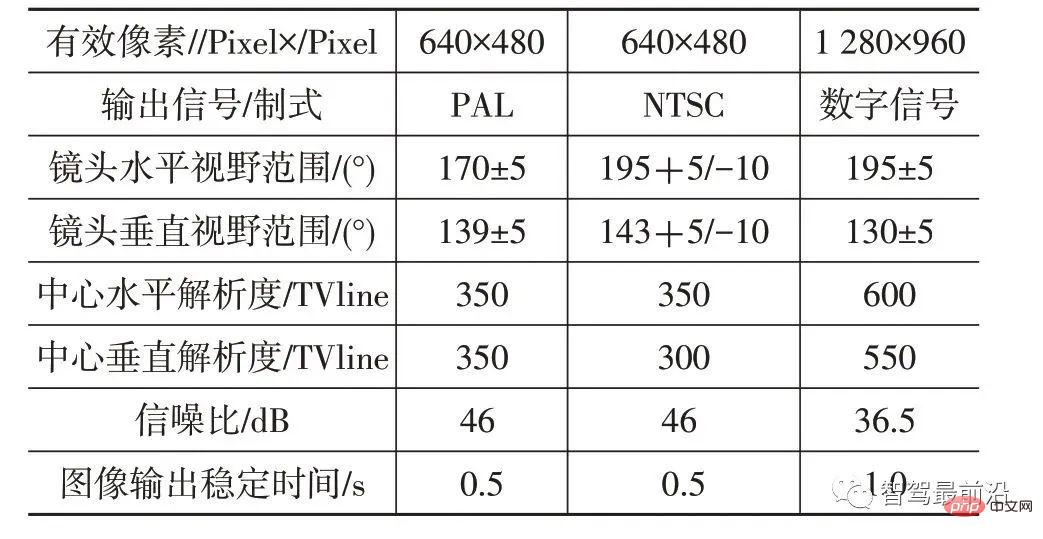
Tabelle 7 Einige Parameter der Surround-View-Kamera
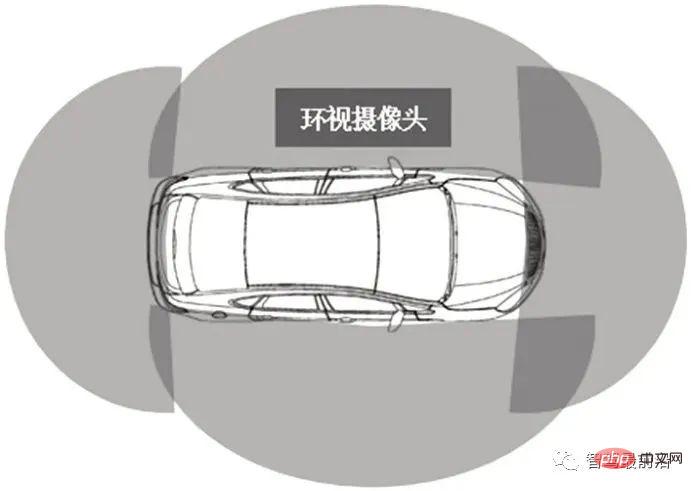
Abbildung 4 Layout der Surround-View-Kameralösung
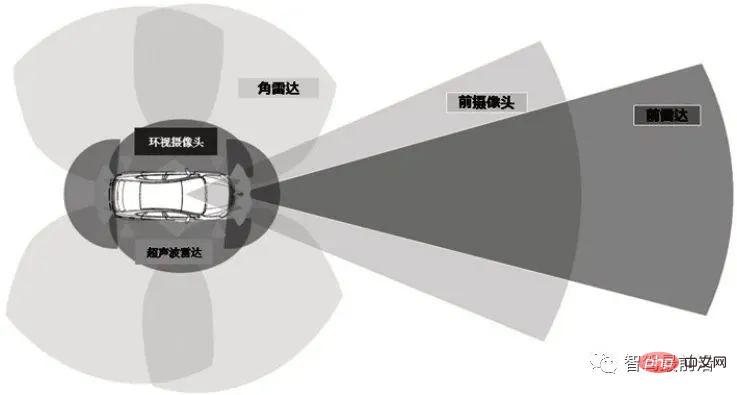
Abbildung 5. Schema Tic der Sensoranordnung und -fusion
Vorwärtsintelligenz Die Integration von Kamera und Vorwärts-Millimeterwellenradar-Layout
Die Installationsposition des Frontradars wird entsprechend den Anforderungen an die Radarleistungsparameter und der Körperform festgelegt und die angemessene Layoutposition wird festgelegt. Die Radarhöhe über dem Boden (der Abstand zwischen der Achse der Radarantenne und dem Boden) beträgt empfohlenerweise 50 cm, ein Wert zwischen 30 cm und 120 cm ist akzeptabel. In Höhen von etwa 30 cm über dem Boden kann es zu übermäßigen vom Boden reflektierten Signalen kommen, die den direkten Signalempfang beeinträchtigen und das Risiko einer Erkennung verringern. Der Abstand zwischen Radar und Schutzabdeckung beträgt mehr als 15 mm (2-fache Wellenlänge, wodurch der Einfluss komplexer Nahfelder auf den Radarstrahl vermieden werden kann) und weniger als 40 mm (um eine zu große Schnittfläche der Radarwellen zu vermeiden). ). Die seitlichen Positionskoordinaten des Radars liegen zwischen -30 cm und 30 cm. Wenn das Radar mit einer Frontabdeckung installiert wird, gelten auch besondere Anforderungen an die Abdeckung, wie z. B. ein Krümmungsradius > 600 mm, eine gleichmäßige Dicke am Schnittpunkt von Strahl und Abdeckung und ein Profil, das Simulationstests unterzogen werden muss , ein Material, das auf elektrische Eigenschaften getestet werden muss, und nicht besprühte Teile usw. Der Abstand zwischen dem Millimeterwellen-Radarstrahl und der umgebenden Struktur beträgt >5 mm, der Winkel zum Fahrzeug – Nickwinkel, Gierwinkel und Rollwinkel – beträgt 0°. Der Abstand zwischen dem Radar-FOV und dem Nummernschildrahmen ist größer mehr als 15 mm, um eine Beeinträchtigung der Radarerkennung nach der Montage des Nummernschilds zu vermeiden. Wie in Abbildung 6 dargestellt.
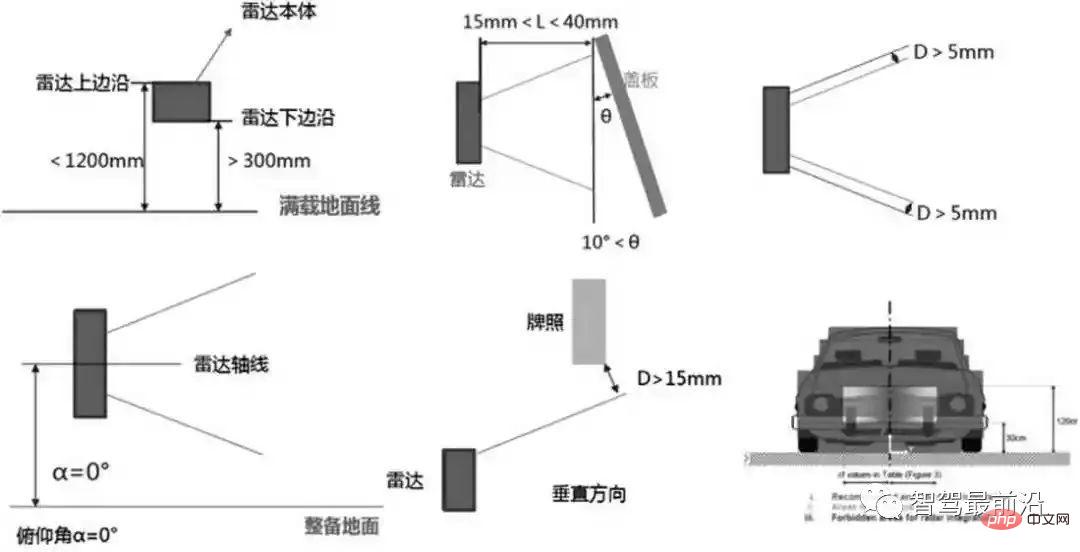
Abbildung 6 Vorwärts-Millimeterwellenradar-Layout
Die beste vertikale Einbauposition der Frontkamera ist in der Mitte der Windschutzscheibe, die Höhe liegt vorzugsweise über 1.200 mm und ein Versatz ist zulässig Verschieben Sie die Mittellinie der Windschutzscheibe innerhalb von 10 cm. Der Gierwinkel, Rollwinkel und Nickwinkel liegen vorzugsweise nahe 0° (±3°). Die Halterung sollte in einem sauberen Glasbereich installiert werden und der Sichtbereich sollte nicht durch Siebdruck oder Druck blockiert werden. Der Abstand zwischen dem Kamerafenster und der Wischerspurlinie sollte mehr als 30 mm betragen und der Abstand zwischen dem Objektivmodul und der Windschutzscheibe sollte mindestens 1 mm betragen. Die Öffnungen sollten durch den auf jede Schicht der Windschutzscheibe projizierten Blickwinkel bestimmt werden. Lüftungslöcher (Öffnungsfläche größer als 120 mm2) sollten an der Kamerahalterung und -abdeckung angebracht werden, um die Luftzirkulation zu gewährleisten. Die Positionstoleranz der Halterung bei der Montage an der Windschutzscheibe beträgt typischerweise ±1 mm (Positionierung) und ±2,5° (Rotation) (Abb. 7).
Layout und Integration von lateralem Millimeterwellenradar (Winkelradar)
Winkelradar legt eine angemessene Layoutposition basierend auf seinen Leistungsparameteranforderungen und der Körperform fest, und der Körper muss Platz für das Layout reservieren. Höhenanforderungen für die Winkelradaranordnung: Zu niedrig, Schlamm, Wasser und Schmutz wirken sich auf das Radar aus. Zu hoch wird der tote Bereich in der Nähe des Fahrzeugs größer (kann dazu führen, dass kein Sichtfeld über ±20° hinausgeht), der empfohlenen Höhe liegt zwischen 400 mm und 1.000 mm. Um den toten Bereich zu minimieren, sollte der Winkel zwischen dem Radar und der Längsachse des Fahrzeugs zwischen 30° und 45° liegen, und der Winkel zwischen dem Radar und der horizontalen Ebene des Fahrzeugs wird am besten auf 90° eingestellt. Im Sichtfeld des Radars befinden sich kein Metall, keine Grate, keine mehrschichtigen Strukturen oder Materialien. Der maximale Winkel zwischen dem Sichtfeld und der Abdeckung muss flach sein und die Krümmung muss größer als 350 mm sein. Abbildung 7 Frontkamera-Layout-Diagramm Die Grundrisse sind relativ groß. Der Ultraschall-Radarsensor wird auf der Halterung montiert und durch Verkleben mit der Stoßfängerhaut fixiert. Um die Erkennungsanforderungen bestmöglich zu erfüllen, stellt der Standort des Ultraschallradars bestimmte Anforderungen bereit, siehe Abbildung 8. Zu den spezifischen Anforderungen an die Anordnung gehören: Vermeiden Sie die Platzierung des Radars auf der Oberfläche der Stoßstange des Autos, vermeiden Sie das Aufnehmen von Fotos, die den Radarerfassungsbereich stören, halten Sie sich von Auspuffrohren mit Wärmequellen, Hochleistungslampen usw. fern.
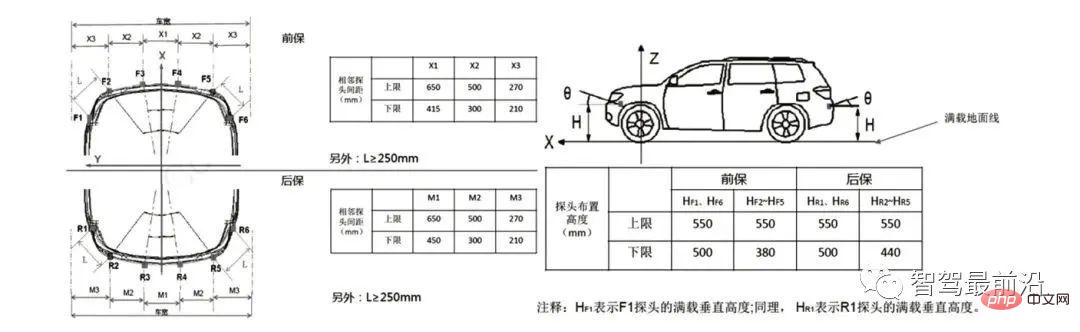
Abbildung 8 Standortanforderungen für Ultraschallradar-Layout
Rundumsichtkamera
AVM-Rundumsichtsystem, insgesamt 4 Kameras müssen vorne, hinten, links und rechts angeordnet werden Karosserie. Die Frontkamera ist im Bereich nahe dem Frontgrill verbaut. Die Rückfahrkamera wird an oder in der Nähe der Kennzeichenbeleuchtung der Hintertür installiert. Die linke und rechte Kamera müssen an der Unterseite des Rückspiegelgehäuses installiert werden, und im linken und rechten Rückspiegel muss ein Kameraloch reserviert werden, um die Installation der linken und rechten Kamera zu erleichtern. Bei der Anordnung der Kameras sollte eine optische Kalibrierung durchgeführt werden, um sicherzustellen, dass die Bilder benachbarter Kameras ausreichend überlappen, und durch das Bildspleißen sollte sichergestellt werden, dass es innerhalb des 1°-Montagefehlers der Kamera keine schwarzen Kanten gibt Der Blindbereich sollte die Anforderungen der Unternehmensstandards nicht überschreiten. Um zu verhindern, dass das Panoramabild aufgrund von Änderungen im aufgenommenen Bild gespleißt wird, sollte die Kamera über eine Anti-Rotations-Positionierungsstruktur verfügen.
Anordnungsvoraussetzungen für Front- und Heckkameras: Bei voller Beladung beträgt die Höhe über dem Boden ≥ 600 mm; der Abstand von der Mittelebene beträgt ≤ 50 mm ; die Sichtachse verläuft parallel zur XZ-Ebene des Fahrzeugs; der Winkel zwischen der Sichtachse und der Z-Achse des Fahrzeugs wird empfohlen. Es wird empfohlen, dass der Winkel 45° bis 75° beträgt und der Schnittpunkt der optischen Achse und der Die Bodenlinie liegt 1.000 bis 2.000 mm von der äußersten Seite der Fahrzeugkarosserie entfernt. Das Sichtfeld des toten Winkels beträgt ≤ 200 mm. Das vertikale Sichtfeld der Kamera beträgt 3.000 mm hoher Gegenstand, der aufrecht auf dem Boden steht. Abbildung 9 zeigt die Layoutanforderungen für die Rundumsichtkamera (vorne).
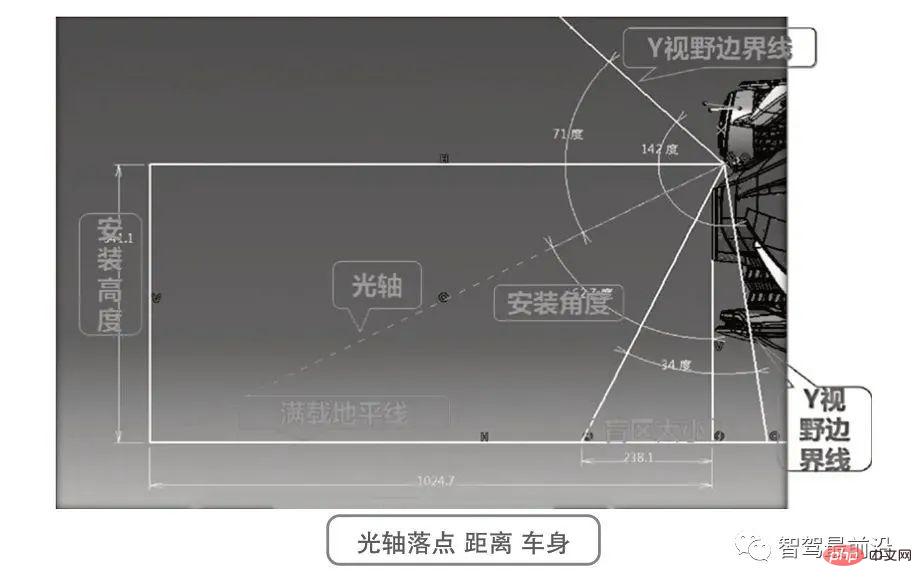
Abbildung 9 Anordnungsanforderungen für die Rundumsichtkamera (vorne)
Anordnungsanforderungen für die linke und rechte Kamera (am Rückspiegel): Vorderansicht der Kamera, der Winkel zwischen den Der Blickwinkel und die Vertikale sollten 20 bis 25° betragen. Der Winkel zwischen dem Blickwinkel und der Vertikalen sollte 1,5 bis 5° betragen. Die Einbauhöhe sollte größer als 900 mm sein Die Karosserie ist größer als 100 mm; das Sichtfeld muss 10 m vor und hinter dem Fahrzeug abdecken, und das 10 m-Sichtfeld muss mit dem Rückspiegelgehäuse verbunden sein. Der Abstand zwischen der Unterkante ist größer als 1 mm. Der Winkel zwischen dem vorderen und hinteren 5-m-Sichtfeld und der optischen Achse beträgt weniger als 85° und der Mindestabstand zwischen dem 5-m-Sichtfeld und der Unterkante des Rückspiegelgehäuses ist größer als 1,2 mm Der Überstand beträgt weniger als 5 mm (einstellbar).
Neben der Sicherstellung der Abdeckungsredundanz des Erfassungsbereichs müssen die Sensoren des fortschrittlichen Fahrassistenzsystems auch bei der tatsächlichen Installation die Einbaubedingungen jedes Sensors und Fahrzeugs einhalten. Die in diesem Artikel vorgestellten Sensor-Layout-Parameter werden basierend auf einem bestimmten Automodell und Sensorprodukten eines bestimmten Lieferanten zusammengefasst und zusammengeführt. Verschiedene Sensorlieferanten haben leicht unterschiedliche Layoutanforderungen. Während des eigentlichen Fahrzeugmodelllayoutprozesses müssen adaptive Anpassungen basierend auf den vom Lieferanten bereitgestellten Layoutanforderungen sowie dem Layout und der Form des Fahrzeugs vorgenommen werden.
Das obige ist der detaillierte Inhalt vonIn einem Artikel wird darüber gesprochen, wie die Sensoren des ADAS-Systems angeordnet werden sollten. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr