
Heim >Technologie-Peripheriegeräte >KI >Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?
Wie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOriginal
- 2024-06-02 14:44:001496Durchsuche
Im gestrigen Interview wurde ich gefragt, ob ich jemals Long-Tail-Fragen gestellt hätte, also dachte ich, ich würde eine kurze Zusammenfassung geben.
Das Long-Tail-Problem selbstfahrender Autos bezieht sich auf Randfälle bei selbstfahrenden Autos, also mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Das wahrgenommene Long-Tail-Problem ist einer der Hauptgründe, die derzeit den betrieblichen Designbereich intelligenter autonomer Einzelfahrzeugfahrzeuge einschränken. Die zugrunde liegende Architektur und die meisten technischen Probleme des autonomen Fahrens wurden gelöst, und die verbleibenden 5 % der Long-Tail-Probleme wurden nach und nach zum Schlüssel zur Einschränkung der Entwicklung des autonomen Fahrens. Zu diesen Problemen gehören eine Vielzahl fragmentierter Szenarien, Extremsituationen und unvorhersehbares menschliches Verhalten.
Edge-Szenarien beim autonomen Fahren
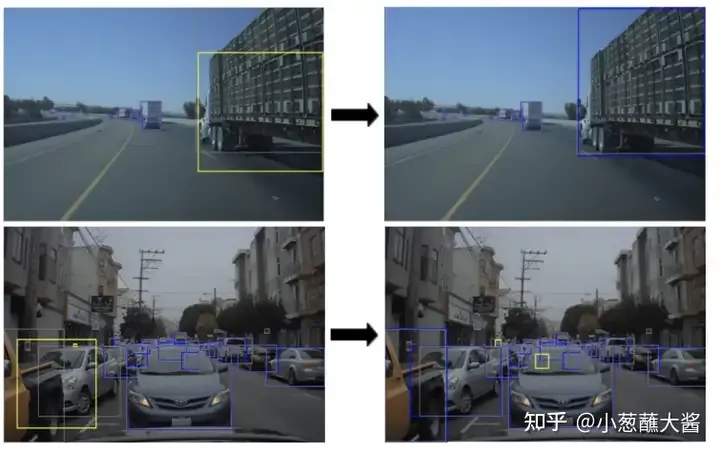
Der „Long Tail“ bezieht sich auf Edge-Cases bei autonomen Fahrzeugen (AV). Edge-Cases sind mögliche Szenarien mit geringer Eintrittswahrscheinlichkeit. Diese seltenen Ereignisse werden in Datensätzen häufig übersehen, da sie seltener auftreten und einzigartiger sind. Während Menschen von Natur aus gut im Umgang mit Grenzfällen sind, kann man das nicht von der KI behaupten. Zu den Faktoren, die Randszenen verursachen können, gehören: Lastkraftwagen oder speziell geformte Fahrzeuge mit Vorsprüngen, Fahrzeuge, die scharf abbiegen, das Fahren in Menschenmengen, Fußgänger, die über die Straße laufen, extremes Wetter oder schlechte Lichtverhältnisse, Personen mit Regenschirmen, Personen in Autos, dann Umzugskartons, umstürzende Bäume mitten auf der Straße usw.Beispiel:
- Legen Sie eine transparente Folie vor das Auto. Wird das transparente Objekt erkannt und wird das Fahrzeug langsamer?
- Das Lidar-Unternehmen Aeye hat eine Herausforderung durchgeführt: Wie geht autonomes Fahren damit um? ein Ballon, der mitten auf der Straße schwebt? Selbstfahrende Autos der Stufe L4 neigen dazu, Kollisionen zu vermeiden. In diesem Fall werden sie ausweichen oder die Bremsen betätigen, um unnötige Unfälle zu vermeiden. Der Ballon ist ein weicher Gegenstand und kann ohne Hindernisse direkt passieren.
Methoden zur Lösung des Long-Tail-Problems
Synthetische Daten sind ein großes Konzept, und Wahrnehmungsdaten (Nerf, Kamera-/Sensorsimulation) sind nur einer der herausragenderen Zweige. In der Branche sind synthetische Daten längst zur Standardlösung für Longtail-Verhaltenssimulationen geworden. Synthetische Daten oder spärliches Signal-Upsampling sind eine der ersten Lösungen für das Long-Tail-Problem. Die Long-Tail-Fähigkeit ist das Produkt aus der Generalisierungsfähigkeit des Modells und der in den Daten enthaltenen Informationsmenge.Tesla-Lösung:
Verwenden Sie synthetische Daten, um Kantenszenen zu generieren und den Datensatz zu erweitern. Prinzip der Daten-Engine: Erkennen Sie zunächst Ungenauigkeiten im vorhandenen Modell und verwenden Sie dann diesen Klassenfall, der zu seinen Komponententests hinzugefügt wird . Außerdem werden mehr Daten zu ähnlichen Fällen gesammelt, um das Modell neu zu trainieren. Dieser iterative Ansatz ermöglicht es, so viele Randfälle wie möglich zu erfassen. Die größte Herausforderung bei der Erstellung von Randfällen besteht darin, dass die Kosten für das Sammeln und Beschriften von Randfällen relativ hoch sind und dass das Sammelverhalten möglicherweise sehr gefährlich oder sogar unmöglich zu erreichen ist.
NVIDIA-Lösung:
NVIDIA hat kürzlich einen strategischen Ansatz namens „Imitation Training“ vorgeschlagen (Bild unten). Bei diesem Ansatz werden reale Systemausfallfälle in einer simulierten Umgebung nachgestellt und dann als Trainingsdaten für autonome Fahrzeuge verwendet. Dieser Zyklus wird wiederholt, bis die Leistung des Modells konvergiert. Ziel dieses Ansatzes ist es, die Robustheit des autonomen Fahrsystems durch die kontinuierliche Simulation von Fehlerszenarien zu verbessern. Mithilfe von Simulationsschulungen können Entwickler verschiedene Fehlerszenarien in der realen Welt besser verstehen und lösen. Darüber hinaus können schnell große Mengen an Trainingsdaten generiert werden, um die Modellleistung zu verbessern. Durch Wiederholen dieses Zyklus,
Einige Gedanken:
F: Sind synthetische Daten wertvoll? A: Der Wert ist hier in zwei Typen unterteilt, d. h. die Prüfung, ob in der generierten Szene Mängel im Erkennungsalgorithmus festgestellt werden können wird verwendet Ob das Training des Algorithmus auch die Leistung effektiv verbessern kann. F: Wie kann man virtuelle Daten nutzen, um die Leistung zu verbessern? Ist es wirklich notwendig, Dummy-Daten zum Trainingssatz hinzuzufügen? Wird das Hinzufügen zu einem Leistungsrückgang führen? A: Diese Fragen sind schwer zu beantworten, daher wurden viele verschiedene Lösungen zur Verbesserung der Trainingsgenauigkeit entwickelt:- Hybrides Training: Fügen Sie unterschiedliche Anteile virtueller Daten zu realen Daten hinzu, um die Leistung zu verbessern.
- Lernen übertragen: Verwenden Sie reale Daten, um das Modell vorab zu trainieren, frieren Sie dann bestimmte Ebenen ein und fügen Sie dann gemischte Daten für das Training hinzu.
- Imitationslernen: Es ist auch ganz natürlich, einige Szenarien von Modellfehlern zu entwerfen und einige Daten zu generieren, wodurch die Leistung des Modells schrittweise verbessert wird. Bei der tatsächlichen Datenerfassung und dem Modelltraining werden auch einige ergänzende Daten gezielt erfasst, um die Leistung zu verbessern.
Einige Erweiterungen:
Um die Robustheit eines KI-Systems gründlich zu bewerten, müssen Unit-Tests sowohl allgemeine als auch Randfälle umfassen. Einige Randfälle sind jedoch möglicherweise nicht aus vorhandenen realen Datensätzen verfügbar. Zu diesem Zweck können KI-Praktiker synthetische Daten zum Testen verwenden.
Ein Beispiel ist ParallelEye-CS, ein synthetischer Datensatz, der zum Testen der visuellen Intelligenz autonomer Fahrzeuge verwendet wird. Der Vorteil der Erstellung synthetischer Daten im Vergleich zur Verwendung realer Daten besteht in der mehrdimensionalen Kontrolle über die Szene für jedes Bild.
Synthetische Daten werden als praktikable Lösung für Randfälle in AV-Produktionsmodellen dienen. Es ergänzt reale Datensätze mit Randfällen und stellt sicher, dass AV auch bei ungewöhnlichen Ereignissen robust bleibt. Außerdem sind sie skalierbarer, weniger fehleranfällig und kostengünstiger als reale Daten.
Das obige ist der detaillierte Inhalt vonWie lässt sich das Long-Tail-Problem in autonomen Fahrszenarien lösen?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Welche anwendbaren Szenarien gibt es für das Strategiemuster?
- Welche Einsatzszenarien gibt es für Nachrichten-Middleware?
- Physischer Abbau der Tesla Autopilot-Hardware 4.0: Hinzufügen von Radar und Bereitstellung weiterer Kameras
- Eine ausführliche Diskussion über den aktuellen Status und zukünftige Trends der Entwicklungstoolketten für autonomes Fahren
- Tesla stellt erneut Innovationen in der autonomen Fahrtechnologie dar: Einführung der 3D-Szenenanzeige zur Verbesserung der Parkassistenzfunktionen