
Heim >Technologie-Peripheriegeräte >KI >Eine ausführliche Diskussion über den aktuellen Status und zukünftige Trends der Entwicklungstoolketten für autonomes Fahren
Eine ausführliche Diskussion über den aktuellen Status und zukünftige Trends der Entwicklungstoolketten für autonomes Fahren

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-04-25 16:25:244464Durchsuche
Im Rahmen des „intelligenten“ Entwicklungstrends der Automobilindustrie sind verschiedene unterstützte Fahrfunktionen auf L2-Ebene zu wichtigen Konfigurationen geworden, um Verbraucher anzulocken. Andererseits sind in der neuen Ära der „softwaredefinierten Autos“ ", Autonomes Fahren Es ist zu einer wichtigen Strategie geworden, die die zukünftige Entwicklung von Automobilunternehmen beeinflusst.
Vor diesem Hintergrund müssen Automobilhersteller eine Frage beantworten: Sollten sie ihre eigenen autonomen Fahrsysteme entwickeln?
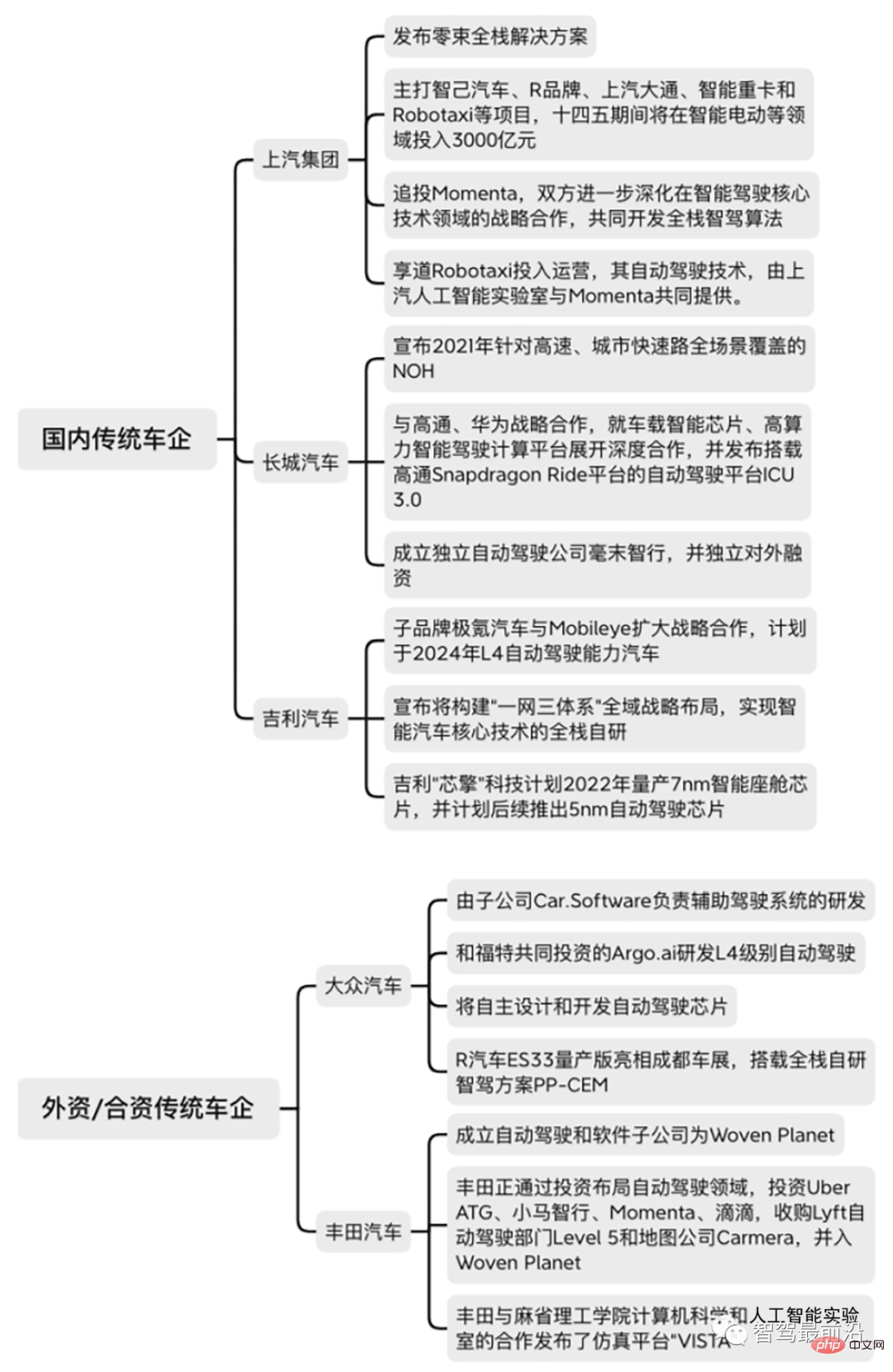
Lassen Sie uns zunächst eine Bestandsaufnahme der Aufstellung mehrerer Automobilunternehmen im Bereich des autonomen Fahrens machen:
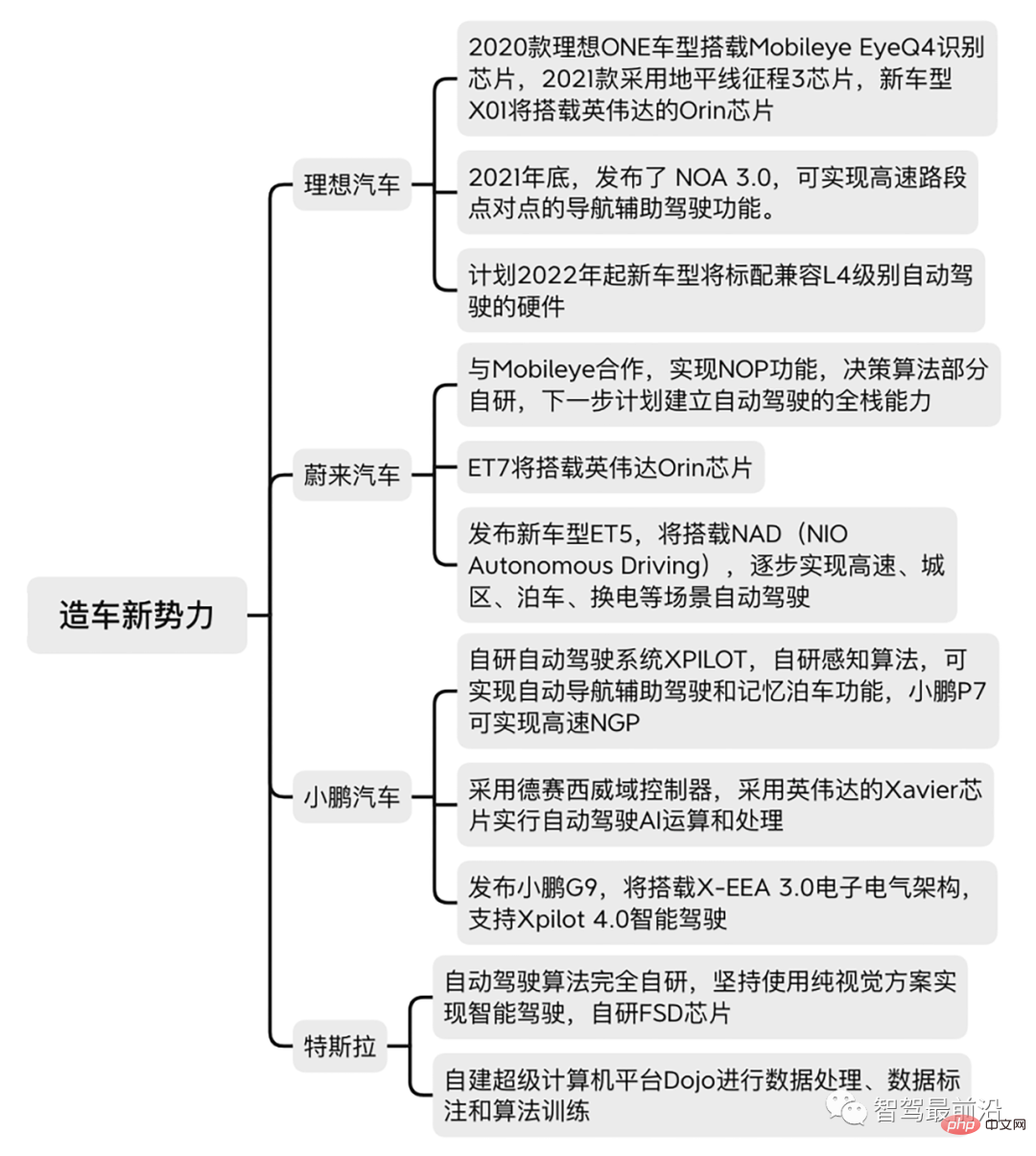 #🏜 ## 🎜🎜# Es ist ersichtlich, dass es für Automobilhersteller zu einem großen Trend geworden ist, selbstfahrende Systeme zu entwickeln. Viele Automobilunternehmen haben auch erkannt, dass der Kern des autonomen Fahrens darin besteht, den Wert von Daten voll auszuschöpfen Im Kontext der „Software- und Hardware-Entkopplung“ haben einige Automobilhersteller sogar unabhängige Tochtergesellschaften gegründet, die sich auf die Entwicklung des intelligenten Fahrens konzentrieren, da sie dem autonomen Fahrgeschäft große Bedeutung beimessen. Beispielsweise hat die FAW Group eine Tochtergesellschaft für künstliche Intelligenz gegründet, FAW (Nanjing) Technology Development Co., Ltd.; die SAIC Group hat ein Softwarezentrum gegründet, SAIC Zero-shu usw.
#🏜 ## 🎜🎜# Es ist ersichtlich, dass es für Automobilhersteller zu einem großen Trend geworden ist, selbstfahrende Systeme zu entwickeln. Viele Automobilunternehmen haben auch erkannt, dass der Kern des autonomen Fahrens darin besteht, den Wert von Daten voll auszuschöpfen Im Kontext der „Software- und Hardware-Entkopplung“ haben einige Automobilhersteller sogar unabhängige Tochtergesellschaften gegründet, die sich auf die Entwicklung des intelligenten Fahrens konzentrieren, da sie dem autonomen Fahrgeschäft große Bedeutung beimessen. Beispielsweise hat die FAW Group eine Tochtergesellschaft für künstliche Intelligenz gegründet, FAW (Nanjing) Technology Development Co., Ltd.; die SAIC Group hat ein Softwarezentrum gegründet, SAIC Zero-shu usw.
 01 Entwicklungsprozess des autonomen Fahrens – vom modellbasierten Design zum datengesteuerten
01 Entwicklungsprozess des autonomen Fahrens – vom modellbasierten Design zum datengesteuerten
Allerdings ist es nicht einfach, ein autonomes Fahren zu entwickeln System selbst entwickeln Dies liegt daran, dass der Entwicklungsprozess und die Toolkette autonomer Fahrsysteme besonders komplex sind.
Die traditionelle Automobilsoftwareentwicklung verwendet das V-Modell, einschließlich vieler ADAS-Funktionen, die ebenfalls mit diesem Verfahren entwickelt werden. Einzelheiten finden Sie in der folgenden Abbildung. Die linke Seite zeigt den Entwurfs- und Entwicklungsprozess und die rechte Seite den Test- und Verifizierungsprozess.
V-Modell-Entwicklungsprozess
#🎜 🎜#Der Design- und Entwicklungsprozess auf der linken Seite basiert derzeit auf dem MBD-Entwicklungsprozess (Model Based Design). Die meisten Elemente (Modelle) basieren auf den Produkten von MathWorks (MATLAB und Simulink). Standard-Toolboxen und Blockgruppen zum Erstellen von Modellen auf einer grafischen Oberfläche und zum automatischen Generieren von Code. Die Gesamtmenge an Code, die Ingenieure schreiben müssen, ist nicht groß, die Entwicklungsgeschwindigkeit ist hoch und die Entwicklungskosten sind ebenfalls niedrig.
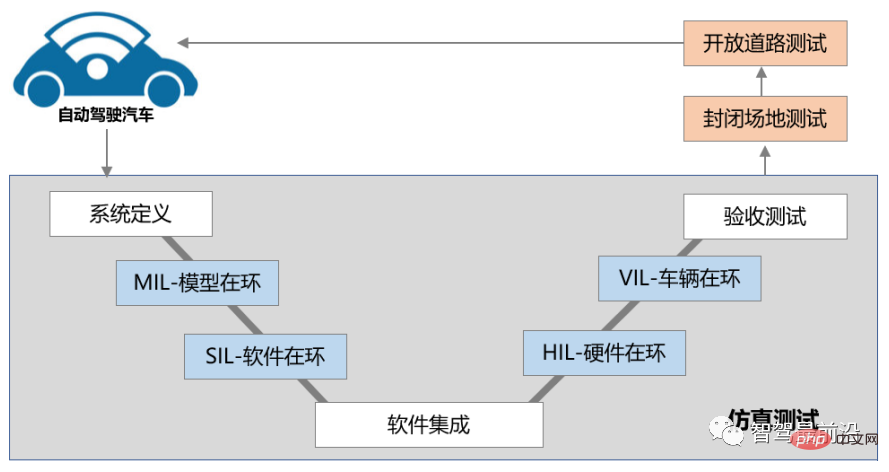 Die rechte Seite ist der Testverifizierungsprozess, das heißt, X in der Schleife (X in der Schleife), wobei verschiedene Testmethoden in verschiedenen Phasen verwendet werden, einschließlich MIL/ SIL/PIL/HIL/DIL/VIL und andere Testmethoden.
Die rechte Seite ist der Testverifizierungsprozess, das heißt, X in der Schleife (X in der Schleife), wobei verschiedene Testmethoden in verschiedenen Phasen verwendet werden, einschließlich MIL/ SIL/PIL/HIL/DIL/VIL und andere Testmethoden.
Herkömmliche Steuerlogik für Automobilsoftware, einschließlich einiger relativ einfacher ADAS-Funktionen von L2, kann die Anforderungen mithilfe des MBD+X-In-the-Loop-Entwicklungsprozesses immer noch erfüllen, aber Mit dem Die Funktionen autonomer Fahralgorithmen werden immer komplexer und der bisherige Entwicklungsprozess auf Basis von MBD ist etwas unzureichend geworden.
Erstens haben sich bei komplexeren autonomen Fahrfunktionen auch die Menge an Softwarecode und die Komplexität der Funktionen um mehrere Größenordnungen erhöht. Strukturierte Toolboxen und Blockgruppenmodellierung sind in der Lage, einfache Funktionsalgorithmen zu entwickeln, aber angesichts komplexer Deep-Learning-Algorithmen scheint MBD hinsichtlich der Flexibilität etwas überfordert zu sein.
Zweitens hat sich die Branche der künstlichen Intelligenz über so viele Jahre entwickelt, sei es Architektur, Toolketten oder verschiedene Open-Source-Funktionsbibliotheken, sie hat ein starkes Ökosystem gebildet Für Praktiker des autonomen Fahrens ist die direkte Implementierung mit der Programmierung viel effizienter als die Modellierung in Mathworks.
Gleichzeitig wird sich traditionelle Automobilsoftware nach der Massenproduktion nicht mehr ändern, was für autonome Fahrsoftware unrealistisch ist. Einerseits ist der Entwicklungszyklus des autonomen Fahrens lang und die Zeit für Entwicklung und Tests innerhalb des Fahrzeugentwicklungszyklus reicht bei weitem nicht aus. Andererseits ermöglicht OTA eine kontinuierliche Aktualisierung der Software, sodass die Lebensdauer verlängert wird Der Zyklus der Software wird ebenfalls erweitert, und mit Deep Learning muss der durch das Modell dargestellte autonome Fahralgorithmus kontinuierlich Long-Tail-„Eckfall“-Daten als „Treibstoff“ sammeln, um das Algorithmussystem kontinuierlich zu iterieren.
Es gibt ein Sprichwort, das gut passt: Wer ins All will, muss ein Raumschiff bauen. Um autonome Fahrsysteme effizienter zu entwickeln, haben Branchenexperten einen geeigneten Entwicklungsprozess für autonomes Fahren gefunden, der auf Deep Learning basiert – also einem datengesteuerten End-to-End-Entwicklungsprozess.
Zukunftsorientierte Automobilunternehmen und Tier 1 sind sich dieser Veränderung im Softwareentwicklungsprozess ebenfalls längst bewusst.
Chen Liming, Präsident von Bosch Chassis Control Systems China, sagte einmal öffentlich: „Autonomes Fahren umfasst so viele Szenarien, dass es unmöglich ist, auf herkömmliche Weise fortzufahren, daher müssen tatsächliche Straßentests einbezogen werden, insbesondere datengesteuert.“ Die Verifizierungsmethode zur Überprüfung der Sicherheit des autonomen Fahrens besteht darin, das V-Modell mit dem datengesteuerten geschlossenen Regelkreis zu kombinieren, um eine Sicherheitsüberprüfung zu erreichen.“ Lu Jianxiang, leitender Direktor des Pan Asia Technology Center, sagte auf der jüngsten World Intelligence Conference: „Traditionell.“ Unternehmen müssen vom ursprünglichen Wasserfall-Systemintegrationsentwicklungsmodell der Fahrzeugseite zum agilen Szenario-Integrationsentwicklungsmodell der Cloud-, Pipe- und Endintegration übergehen. „Dies bedeutet natürlich nicht, dass die traditionelle MBD-Methode vollständig abgeschafft wurde.“ . Veraltet. Die Idee des V-Modells ist immer noch sehr aufschlussreich. Beispielsweise ist die Systemsimulation, die beim Testen autonomer Fahrsysteme eine wichtige Rolle spielt, tatsächlich SIL (Software-Änderung), und die MBD-Entwicklungsmethode verwendet die zugrunde liegenden Logikalgorithmen des Fahrzeugs, wie z. B. Fahrzeugsteuerungsalgorithmen, werden weiterhin verwendet.
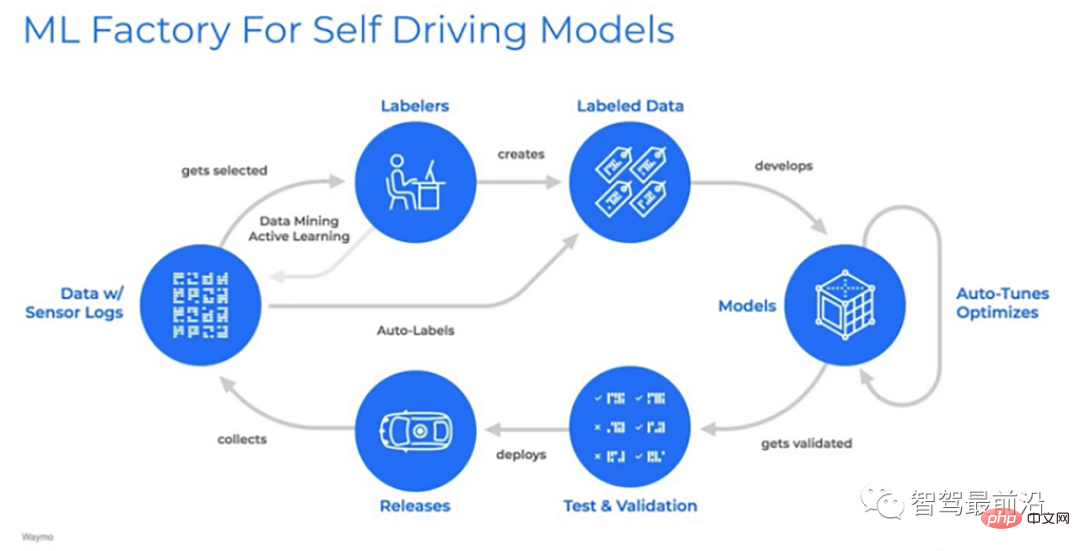
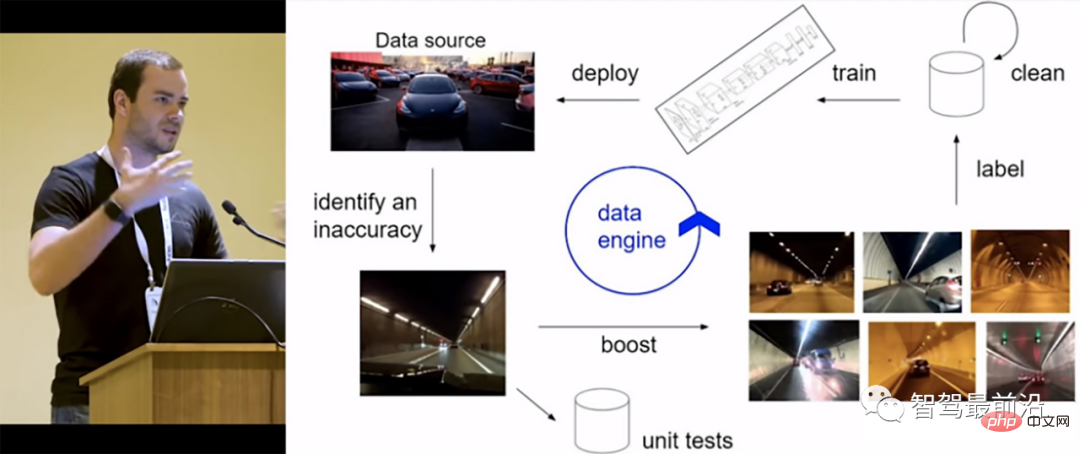
Obwohl der datengesteuerte Softwareentwicklungsprozess jedes Unternehmens im Detail unterschiedlich ist, ist die Grundidee dieselbe und folgt im Wesentlichen den folgenden Ideen: Datenerfassung -> Datenspeicherung -> Datenvorverarbeitung -> Data Mining -> Datenanmerkung –>Modelltraining –>Simulationstest –>Bereitstellung und Freigabe.
Waymos Daten-Closed-Loop-Plattform, zitiert aus Huang Yus Zhihu-Artikel
Obwohl es den Anschein hat, als gäbe es nicht viele Schritte, ist der gesamte Link tatsächlich sehr kompliziert.
Nehmen Sie die Datenverarbeitung als Beispiel. Es gibt viele Arten von Daten, einschließlich Kameradaten, Millimeterwellenradardaten und Lidar-Punktwolkendaten. Diese Daten müssen zuerst entrauscht werden, was die sogenannte „Datenbereinigung“ ist " . Am Beispiel von Bildern erfordert die Datenverarbeitung zunächst das Löschen der geografischen Standortinformationen der Bilder, das Entfernen sensibler Informationen wie Gesichter und Nummernschilder und dann die Vereinheitlichung des Formats, bevor die Verarbeitung abgeschlossen ist.
Nachdem die Datenverarbeitung abgeschlossen ist, besteht der nächste Schritt darin, mit der Datenanmerkung zu beginnen. Die Arten der Annotation können grob in 2D-Annotation, 3D-Zielobjektannotation, Gelenkannotation, Spurlinienannotation, semantische Segmentierung usw. unterteilt werden. Dazu gehören auch spezifische Annotationsspezifikationen und der Prozess der Qualitätsprüfung der Annotation. Der gesamte Prozess ist äußerst umständlich.
Und jeder Schritt dieses komplexen Prozesses erfordert die Unterstützung entsprechender Tools und Plattformen.
Im Gegensatz zum MBD-Entwicklungsprozess, der bereits über eine ausgereifte Toolkette verfügt, beginnt der datengesteuerte Entwicklungsprozess spät und die Toolkette ist ineffizient, was den Entwicklern autonomer Fahrzeuge von Automobilherstellern große Probleme bereitet.
Datengesteuert, die Quelle sind Daten. Angesichts des Problems der riesigen Datenmenge, aber des Mangels an hochwertigen Daten verfügen Automobilunternehmen nicht über viel Erfahrung, auf die sie zurückgreifen können.
Natürlich haben verschiedene Automobilhersteller unterschiedliche Akkumulationsniveaus im Bereich des autonomen Fahrens und stoßen auf unterschiedliche Probleme in der Werkzeugkette.
Einige Automobilunternehmen haben früh begonnen und viel investiert. Die (datengesteuerte) Pipeline wurde vollständig durchlaufen und sie haben viel getan, um die Effizienz weiter zu verbessern maßgeschneiderte Entwicklung von Toolketten. Ein Entwickler eines Automobilherstellers sagte gegenüber „Jiuzhang Zhijia“, dass die vorhandenen Toolketten verschiedener Unternehmen „segmentierte Entwicklung“ seien und sich nur auf ihre eigenen Teilfunktionen und nicht auf die Gesamtsituation konzentrierten, was zu ernsthafter Fragmentierung und „Dateninseln“ führe. . . Um ihre eigenen Effizienzanforderungen zu erfüllen, müssen sie ihre eigenen Toolketten entwickeln oder Unternehmen im Ökosystem finden, die diese bereitstellen. Auch die Datenannotationsplattform muss selbst entwickelt werden.
Für Automobilunternehmen, die nicht so viel Erfahrung in diesem Bereich haben, ist es nicht sehr „kosteneffektiv“, so viele Leute in die Entwicklung von Werkzeugketten zu investieren. . Einerseits ist das Fundament schwach und die Technologie ist noch nicht so weit entwickelt. Andererseits gibt es wirklich nicht so viele Menschen. Aufgrund der begrenzten Ressourceninvestitionen und der technischen Grundlagen hoffen sie dennoch, so schnell wie möglich vorgefertigte Toolketten zu integrieren und die (datengesteuerte) Pipeline zu durchlaufen. „Toolketten sind nicht unsere Wettbewerbsfähigkeit. Anforderungsdefinition, Systemintegration und Funktionstests.“ „Wettbewerbsfähigkeit“, sagte der Verantwortliche für intelligentes Fahren eines Automobilherstellers gegenüber „Nine Chapters Intelligent Driving“.
Obwohl verschiedene Automobilhersteller unterschiedliche Entwicklungsstadien haben, weisen sie auch Gemeinsamkeiten auf, das heißt, sie alle haben den Schwachpunkt der „Fragmentierung“ der Werkzeugkette. Als nächstes beginnen wir mit den beiden Gliedern Datenverarbeitung und Simulation und klären detailliert die aktuelle Situation und die Schwachstellen der Werkzeugkette.
02 Datenverarbeitung: der Grundstein der datengesteuerten
Datengesteuert, der Kern sind Daten.
Der traditionelle modellbasierte Entwicklungsprozess basiert eher auf den bisherigen Erfahrungen des Entwicklers bei der Optimierung des Modells, während die datengesteuerte Optimierung auf massiven Daten basiert. Um einen datengesteuerten Entwicklungsprozess zu etablieren, müssen Automobilunternehmen lernen, mit riesigen Datenmengen umzugehen.
Die Datenverarbeitung ist das erste und komplizierteste Glied in der gesamten Entwicklungskette, einschließlich Datenerfassung, Datenvorverarbeitung, Data Mining und Datenannotation usw. Die Datenmenge und die Qualität der Daten bestimmen direkt das Niveau des gesamten Modells.
Das Bild unten zeigt den Link für die Autopilot-Datenverarbeitung von Tesla.
Tesla Autopilot-Datenverarbeitungsfluss (zitiert aus Huang Yus Zhihu-Artikel) #🎜🎜 ## 🎜🎜#
Die datenbezogene Toolkette umfasst Datenerfassung, Daten-Upload, Datenbereinigung, Datenanmerkung und andere Links.1. Datenerfassung: Intelligenz ist unerlässlich
Lass uns zuerst über die Datenerfassung sprechen.Es gibt einige Open-Source-Datensätze in der Branche, die für das grundlegende Algorithmustraining verwendet werden können. Zu den derzeit am häufigsten verwendeten Datensätzen gehören KITTI, nuScenes usw. , aber die meisten dieser Daten stammen aus Es gibt immer noch relativ wenige öffentliche Testsätze und Datensätze mit chinesischen Merkmalen im Ausland.
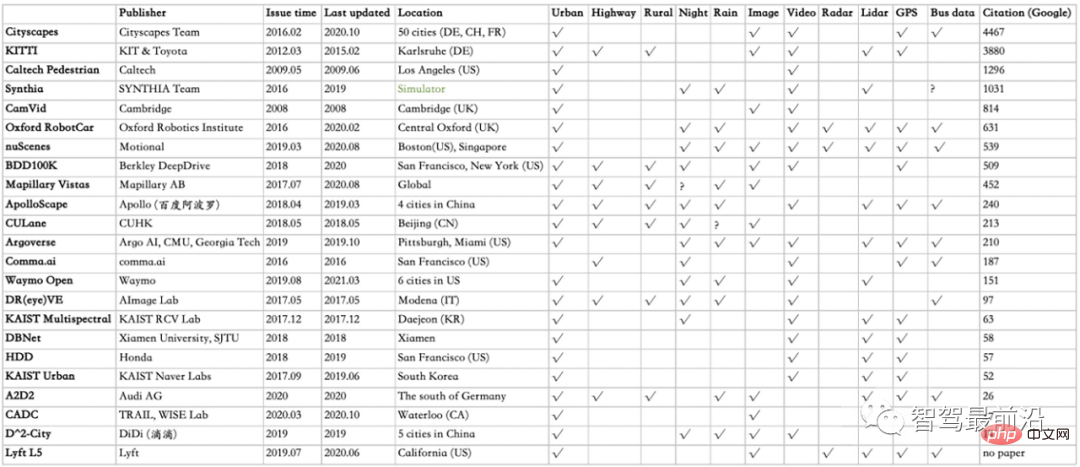
Zusammenfassung der Open-Source-Datensätze zum autonomen Fahren unter Berufung auf den Zhihu-Artikel „Zusammenfassung des autonomen Fahrens“. Open-Source-Datensätze“ 》
In diesem Fall müssen Sie Daten für dieses Szenario sammeln, um einen Algorithmus so zu trainieren, dass er einem bestimmten Szenario entspricht. Nur wenn genügend und qualitativ hochwertige Daten gesammelt werden, kann der Folgeprozess umgesetzt werden. Was dieses erste Glied betrifft, ist die Effizienz der aktuellen Toolkette nicht sehr gut.Ein Mitarbeiter eines führenden Herstellers von Neuwagen erklärte gegenüber „Jiuzhang Zhijia“, dass die automatische Auslösung der Fahrdatenerfassung und das Hochladen von Daten des Unternehmens für die anschließende Problemanalyse nicht ausreichen. Anforderungen. Wenn beispielsweise ein Benutzer ein Auto verunglückt, können die zurückgegebenen Daten nicht verwendet werden – entweder ist die Datenmenge unvollständig oder die Erfassungshäufigkeit ist falsch, und Entwickler sind bei der Behebung des Problems sehr ineffizient.
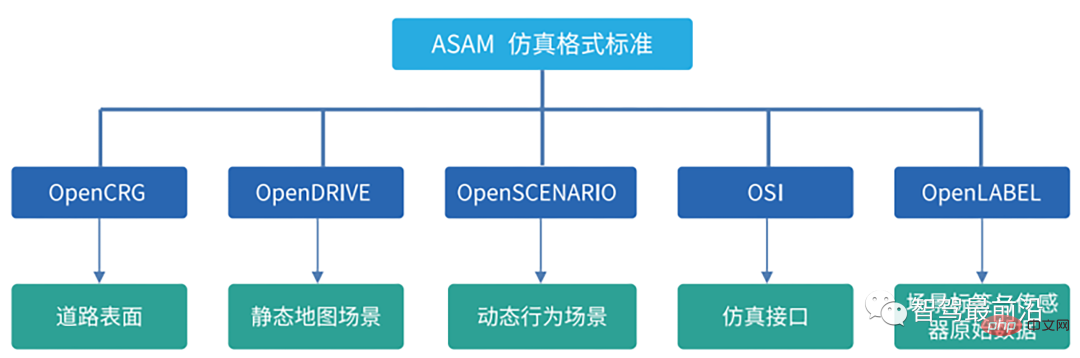
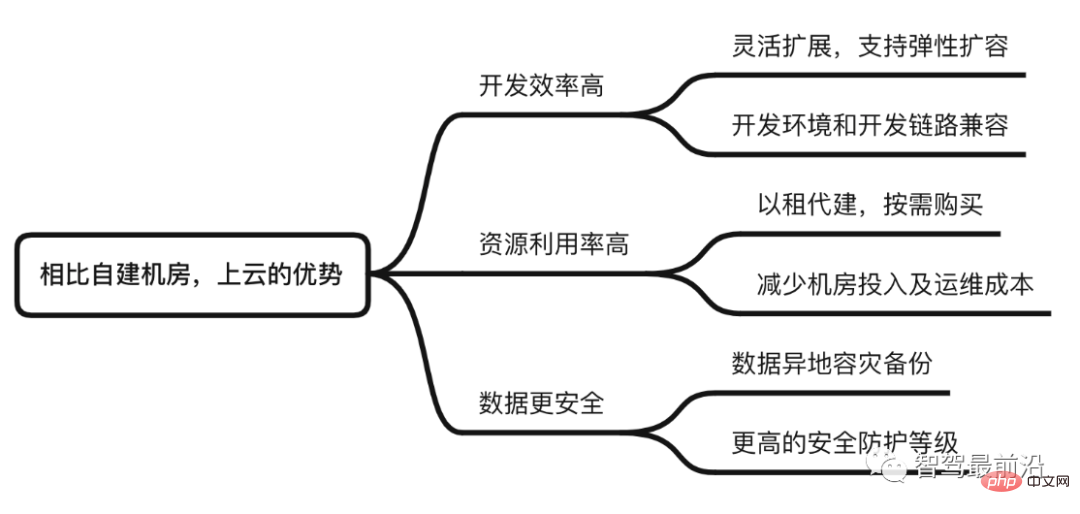
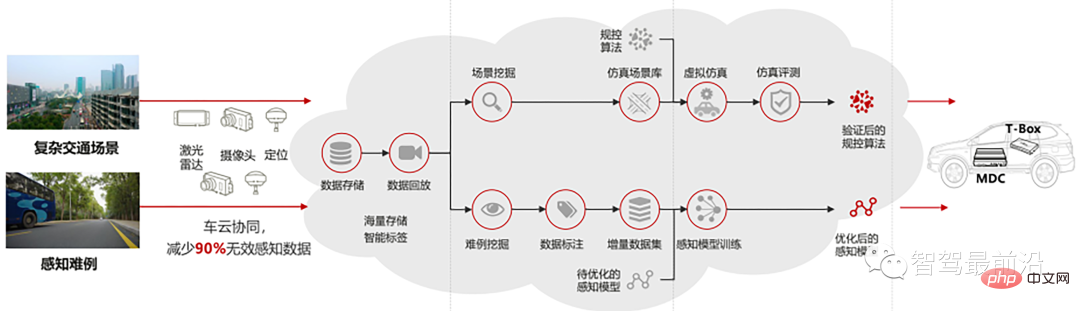
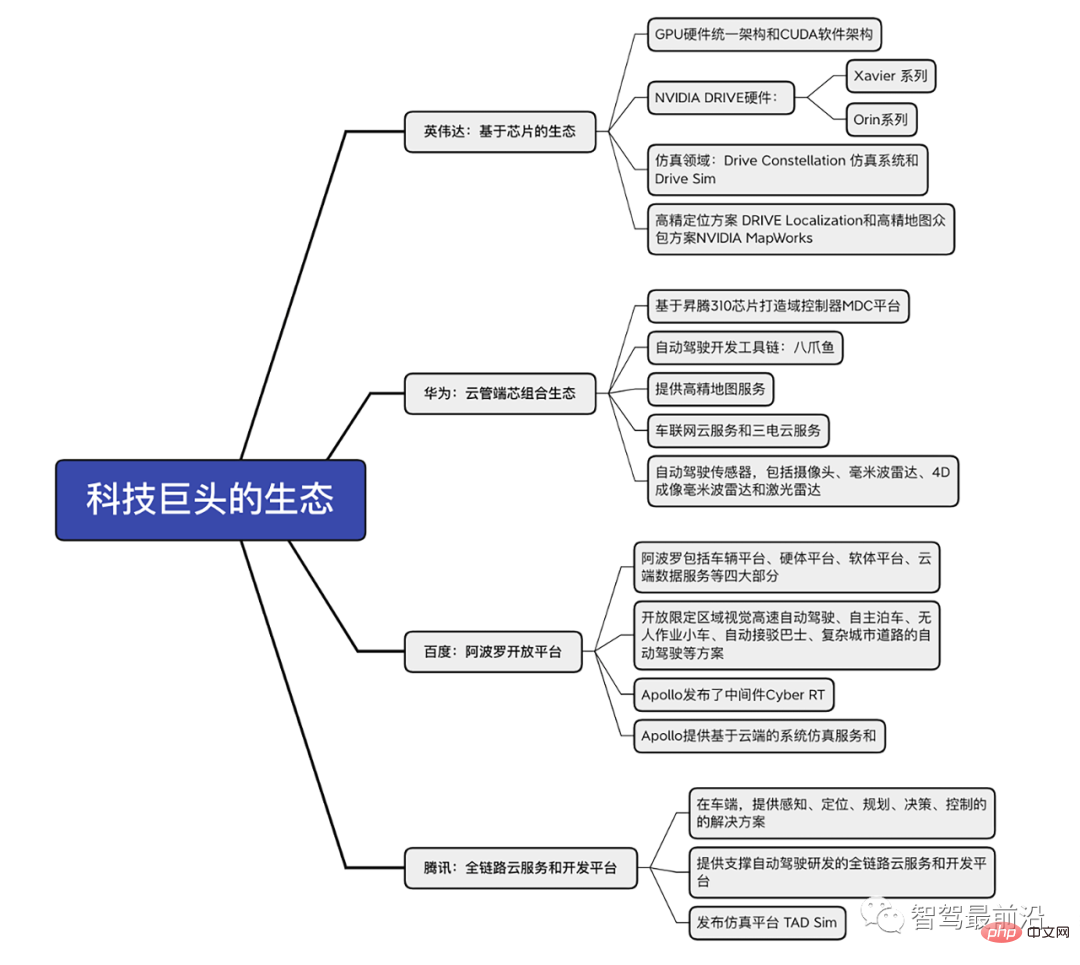
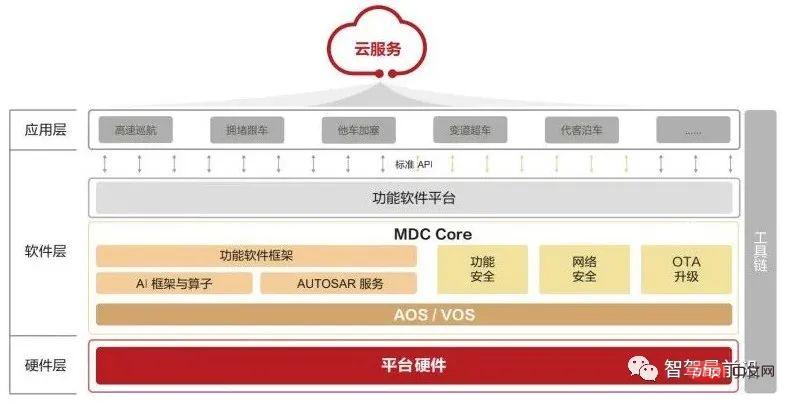
Generell erfordern unterschiedliche Eckfälle unterschiedliche Datenformate und unterschiedliche Zeiträume für die anschließende Analyse. Dies ist leicht zu verstehen, da die Übernahme unterschiedliche Gründe hat, sei es ein Problem mit dem Wahrnehmungs- oder Entscheidungsmodul oder ein Fehler in der hochpräzisen Karte, und erfordert natürlich unterschiedliche Daten. Selbst für einige Sonderfälle wird es einige maßgeschneiderte Datenerfassungsanforderungen geben, die es den Testern ermöglichen, Erfassungsaufgaben für Straßentests durchzuführen. Gerade weil die Erfassungsanforderungen komplex sind und der Link schwer zu öffnen ist, entscheiden sich in der Realität einige Ingenieure dafür, Daten selbst zu sammeln, wenn sie auf Probleme stoßen. Um die oben genannten Probleme zu vermeiden, entscheiden sich einige L4-Robotaxi-Unternehmen für die primitivste Methode der „Festplattenkopie“, um die gesamte Datenmenge zurückzusenden, und führen dann Data Mining durch. Dies ist kein Problem, wenn die Anzahl der Testfahrzeuge gering ist. Sobald die Anzahl der Nachfolgefahrzeuge ein bestimmtes Niveau erreicht, wird die Menge der durch autonomes Fahren gesammelten Daten bald in die PB-Ära eintreten „Massive“ Daten, wir können wirklich wertvolle Informationen finden, Corner Case, der einen kleinen Anteil ausmacht, ist eine echte „Nadel im Heuhaufen“. Um fragmentierte Daten zu sammeln, die für das autonome Fahren wirklich nützlich sind, ist eine intelligentere Datenerfassungsstrategie erforderlich. Was ist eine intelligente Datenerfassungsstrategie? Es dient dazu, Daten für bestimmte Szenarien zu sammeln. Als Huawei-interne Mitarbeiter mit „Nine Chapters Smart Driving“ kommunizierten, erwähnten sie, dass „Huawei Octopus“ die Funktion hat, Szenen intelligent zu kennzeichnen: „Zum Beispiel erfolgt eine manuelle Übernahme oder ein Tunnel oder Kreisverkehr. , ungeschützt.“ Linksabbieger usw. sowie Szenarien wie Express-Dreiräder, bei denen die Cloud aktiv Lerndaten sammeln und akkumulieren muss. Entwickler können Bilder hochladen, die vom Fahrzeug abgerufen werden müssen, und Anweisungen über die Cloud und das Fahrzeug erteilen wird eine ähnliche Methode zur „Suche nach Bildern“ anwenden. Auf diese Weise werden ähnliche Szenarien automatisch abgefangen. Auf diese Weise müssen Sie nur die markierten „wertvollen“ Daten herausfiltern und in die Cloud hochladen, wodurch ein Hochladen vermieden werden kann In Wahrnehmungsmodellen, die auf Deep Learning basieren, ist die gängige Deep-Learning-Trainingsmethode immer noch überwachtes Lernen. Das Training mit dieser Methode erfordert die „Fütterung“ einer großen Datenmenge mit „Ground Truth“. Woher kommen also diese Daten zum „wahren Wert“? Manuell markiert. In der Branche wird daher oft gescherzt, dass künstliche Intelligenz bedeutet: „Es gibt so viel Intelligenz wie es Menschen gibt.“ Aufgrund der Nachfrage nach massiver Datenannotation wurde ein neuer Beruf geboren – „Trainer für künstliche Intelligenz“. Obwohl der Name des Berufs gut klingt, ist die Datenannotation im Wesentlichen eine arbeitsintensive Branche. Um genügend billige Arbeitskräfte zu erhalten, schlossen sich Unternehmen in bestimmten Gebieten von Xinjiang, Henan und Shanxi zusammen und bildeten Industriecluster zur Datenannotation. Als Kunden (Kennzeichnungsnachfrager) sind sie besorgt darüber, ob die Kennzeichnungsqualität gut genug und der Kennzeichnungspreis günstig genug ist. Mit anderen Worten: „Wir brauchen das Pferd, um schnell zu laufen und das Pferd, das kein Gras frisst.“ ." . Zuallererst erfordert das Modelltraining eine hohe Qualität der annotierten Daten. Wenn die Qualität nicht hoch ist, kommt es leicht zu „Müll hinein, Müll raus“. Die Annotationsqualität hängt eng mit den Annotationskosten zusammen. Ob die Annotationsqualität billiger Arbeitskräfte in wirtschaftlich unterentwickelten Gebieten den Anforderungen der Entwickler gerecht werden kann, ist eine große Frage. Zweitens ist die Datenmenge, die annotiert werden muss, riesig. Beispielsweise erfordert ein neuer visueller Algorithmus normalerweise Zehntausende bis Hunderttausende annotierter Bilder für das Training Anmerkung Der Preisunterschied ist bei Hunderttausenden Exemplaren sehr groß. Daher reagiert die Nachfrageseite sehr sensibel auf den Preis. Hohe Qualitätskennzeichnungsanforderungen führen unweigerlich zu einem Anstieg der Arbeitskosten, während niedrige Preise die Etikettierungsqualität beeinträchtigen. Hohe Qualität und niedriger Preis scheinen zu einem unvereinbaren Widerspruch geworden zu sein. Für Automobilunternehmen scheint die Einstellung Dutzender Mitarbeiter für die Datenanmerkung ein zu hoher Arbeitsaufwand zu sein. Sie bevorzugen im Allgemeinen die Auslagerung an professionelle Datenanmerkungsplattformen oder Datenanmerkungsteams. Zu den bekannteren Datenanmerkungsplattformen gehören Baidu Zhongchai, JD Zhongzhi, My Neighbor Totoro Data, Datatang usw. Outsourcing wird jedoch auch in zwei Kategorien unterteilt: Die erste Kategorie ist das Human-Outsourcing, das heißt, es stellt die Annotationsplattform und die Annotationstools selbst bereit, und die zweite Kategorie ist das Service-Outsourcing Das heißt, es stellt nicht die Annotationsplattform selbst und die Kennzeichnungstools bereit, die die zu kennzeichnenden Daten direkt an das Outsourcing-Unternehmen liefern, und das Outsourcing-Unternehmen stellt die gekennzeichneten Daten bereit. Einige Automobilhersteller haben hohe Anforderungen an die Etikettierungseffizienz und entscheiden sich für die Entwicklung eigener Etikettierungsplattformen und Etikettierungstools. Daher entscheiden sie sich für die Auslagerung von Mitarbeitern. Für andere Automobilhersteller ist die Entwicklung eigener Etikettierungsplattformen offensichtlich nicht kosteneffektiv - „Einerseits müssen so viele Ressourcen investiert werden, um Annotationsplattformen zu entwickeln. Andererseits hat die selbst entwickelte Annotationsplattform keinen Preisvorteil gegenüber externen und ist nicht kosteneffektiv. Aufgrund der explosionsartigen Marktnachfrage sind viele Start-up-Unternehmen in der Datenanmerkungsbranche entstanden. Data.forge ist eines von ihnen. Sein Gründer und CEO Yang Yang stellte „Nine Chapters Smart Driving“ vor Um das Preis-Leistungs-Verhältnis zu verbessern, haben sie viele Maßnahmen ergriffen, wie z. B. automatisierte Hilfsanmerkungen und die Optimierung des Komforts von Annotationstools, die auch die zentrale Wettbewerbsfähigkeit des Unternehmens ausmachen. Als Huawei-Insider „Nine Chapters Smart Driving“ vorstellten, erwähnten sie, dass „Huawei Octopus“ auch Datenanmerkungsdienste bereitstellt: „Zuallererst hat ‚Huawei Octopus‘ viel Zeit mit dem Polieren verbracht.“ Der Voranmerkungsalgorithmus von Huawei hat bei mehreren internationalen Open-Data-Set-Testwettbewerben für autonomes Fahren den ersten Platz erreicht. Der Voranmerkungsalgorithmus kann die Zeit erheblich verkürzen erforderlich, um jeden Datenrahmen zu kennzeichnen. „Zweitens werden wir die Mensch-Computer-Interaktionsmethode basierend auf spezifischen Geschäftsabläufen optimieren und die Betriebseffizienz des Personals verbessern, um den Betrieb der Annotationsplattform zu optimieren.“ „Auch hier verfügen wir über ein ausgereiftes Managementsystem, um die Qualität der Annotation sicherzustellen. Nachdem der Annotator die Annotation abgeschlossen hat, wird sie nach einem dreifachen Qualitätsprüfungsprozess geliefert: Selbstprüfung durch den Annotator und stichprobenartige Prüfung durch die Qualität Im Gegensatz zu anderen Annotationsteams, bei denen sich die meisten Annotationsteams in Xinjiang, Henan, Shanxi und anderen Orten befinden, befindet sich das manuelle Annotationsteam von Huawei in Shenzhen. Der Grund dafür ist die Erleichterung der Kommunikation „Um das Problem unzureichender lokaler Open-Source-Datensätze zu lösen, kann ‚Huawei Octopus‘ den Kunden auch inkrementelle Datenanmerkungsdienste anbieten 20 Millionen kommentierte Objekte, und dieser Datensatz wird kontinuierlich iteriert und erweitert. Kunden können diese Daten für das Training und die schnelle Erstellung von Modellen verwenden. „ Als zentraler Bestandteil der autonomen Fahrwerkzeugkette besteht das Simulationssystem hauptsächlich aus drei Teilen: Szenenbibliothek, Simulationsplattform und Bewertungssystem Simulationssystem steht in direktem Zusammenhang mit Es wirkt sich auf die Effizienz der gesamten Entwicklungsverbindung aus und war daher schon immer ein Problem für Kunden, und es ist auch ein Zielmarkt für viele Akteure Das liegt gerade an der Bedeutung und Aufgrund des unausgereiften Status des Simulationssystems habe ich zutiefst das Gefühl, dass „die Welt riesig ist. Es gibt viel zu tun“, und viele Spieler haben diesen Weg eingeschlagen. Je nach Art des Unternehmens können diese Spieler grob in drei Kategorien eingeteilt werden: Werfen wir einen Blick auf die folgenden Kategorien Traditionelle Simulationssoftware wird durch PreScan von Siemens, VTD des deutschen Unternehmens VIRES, CarMaker des deutschen IPG-Unternehmens und CarSim des US-amerikanischen MSC repräsentiert. Sie ist in bestimmten Bereichen stark verbreitet oder wird aufgrund ihrer hervorragenden Leistung in bestimmten Bereichen häufig von Automobilunternehmen eingesetzt Funktionen: CarMaker und CarSim verfügen über die größte Akkumulation und die stärkste Stärke im Bereich der Fahrzeugdynamik; VTD verfügt über hohe Szenenrendering-Fähigkeiten und ist der erste, der OpenX unterstützt. Aufgrund seiner einfachen Bedienung und Benutzerfreundlichkeit hat PreScan viele Benutzer angezogen . Mit ihren bestehenden Kundenressourcen und ihren in der Vergangenheit gesammelten Vorteilen sind sie zu einem wichtigen Player im Bereich der autonomen Fahrsimulationssoftware geworden (2) Start-up-Unternehmen für Simulationssoftware haben den riesigen Markt für Simulationssoftware gesehen, und viele neue Akteure von Start-up-Unternehmen sind ebenfalls eingestiegen, in der Hoffnung, ein Stück vom Kuchen abzubekommen. Beispielsweise hat das inländische Startup 51WORLD (ehemals 51VR) die Testplattform für autonomes Fahren 51Sim-One auf den Markt gebracht; das israelische Startup Cognata bietet unterschiedliche Simulationslösungen für jede Stufe intelligenter Fahrprodukte, um den Bedürfnissen verschiedener Kunden gerecht zu werden Es gibt drei lokale Versionen: Version, Cloud-Version und Hardware-Version. Start-up-Unternehmen reagieren sensibler auf den Markt und haben kein historisches Gepäck mehr. Die Simulationsplattform, die sie für Automobilunternehmen bereitstellen, hat begonnen, alle Aspekte der Simulation bewusst zu öffnen, und ist zu einer Kraft geworden, die nicht ignoriert werden kann. (3) Technologieriese, Simulationssoftwareunternehmen NVIDIA: Drive Constellation NVIDIA hat 2018 das Simulationssystem Drive Constellation auf den Markt gebracht. Das Simulationssystem wird von zwei verschiedenen Servern aufgebaut. Auf dem ersten Server wird die NVIDIA DRIVE Sim-Software für die Sensorsimulation wie Kameras, Lidar und Millimeterwellenradar ausgeführt. Der zweite Server ist mit der NVIDIA DRIVE Pegasus-Fahrzeugcomputerplattform ausgestattet simulierte Sensordaten. Drive Sim basiert auf der Omniverse-Plattform. Laut NVIDIA-Vertretern kann es eine „fotorealistische und physikalisch genaue“ Sensorsimulation erreichen. In Bezug auf Szenarien kann Drive Constellation Datenströme generieren und verschiedene Testumgebungen erstellen, um verschiedene Wetterbedingungen sowie unterschiedliche Straßenoberflächen und Gelände zu simulieren. Es kann auch blendende helle Lichter zu verschiedenen Tageszeiten und eingeschränkte Sicht in der Nacht simulieren. Huawei: „HUAWEI Octopus“-Cloud-Dienst für autonomes Fahren Im Bereich der Entwicklungstoolkette für autonomes Fahren hat Huawei von Data It einen Cloud-Dienst für autonomes Fahren gestartet, der auch als „HUAWEI Octopus“ (HUAWEI Octopus) bekannt ist bietet komplette Lösungen in Bezug auf Sammlung, Hard-Case-Mining, Datenannotation, Algorithmentraining, Simulationsplattform usw. und stellt Kunden eine große Anzahl von Datensätzen und Szenariobibliotheken zur Verfügung, um Automobilunternehmen beim Aufbau eines datengesteuerten geschlossenen Systems zu unterstützen. Loop-Entwicklungsplattform für autonomes Fahren. Darüber hinaus integriert „Huawei Octopus“ auf Basis des leistungsstarken Cloud-Geschäfts von Huawei Cloud-Training und Cloud-Parallelsimulation, verfügt über umfangreiche Simulationsszenarien, hohe Fähigkeiten zur gleichzeitigen Instanzverarbeitung und bietet dem System mehr als 200.000 Simulationsszenarioinstanzen Die virtuelle Testlaufleistung kann 10 Millionen Kilometer überschreiten und unterstützt gleichzeitige Tests von 3.000 Instanzen. Baidu: Apollo-Plattform Baidu Apollo bietet Entwicklern Cloud-basierte Systeme zur Entscheidungsfindung. Es baut eine Cloud-Simulationsplattform auf Baidu Cloud und Microsoft Azure auf, um auf einfache Weise virtuelle Betriebsfunktionen für Millionen von Kilometern pro Tag zu erstellen. In Bezug auf die Szenariobibliothek deckt die von der Baidu Apollo-Plattform bereitgestellte Szenariobibliothek regulatorische Standardszenarien, Szenarien für gefährliche Arbeitsbedingungen und Fähigkeitsbewertungsszenarien mit insgesamt etwa 200 Typen ab. Apollo arbeitete auch mit Unity zusammen, um eine virtuelle Simulationsumgebung auf Basis der Unity-Engine zu entwickeln, und schlug ein End-to-End-Simulationssystem für autonomes Fahren vor – das Augmented-Reality-Simulationssystem für autonomes Fahren AADS, das Bilder aus der realen Welt verbessert Simulieren Sie den Verkehrsfluss und erstellen Sie dann realistische Simulationsszenen. Baidu hat den autonomen Fahrdatensatz ApolloScape geöffnet. Es hat jetzt 147.000 Bilder mit semantischen Annotationen auf Pixelebene geöffnet, darunter Hunderttausende Bilder mit hochauflösenden Bilddaten mit pixelweiser semantischer Segmentierungsanmerkung als Wahrnehmungsklassifizierung und Straßennetzdaten sowie die entsprechende pixelweise semantische Annotation. „ Tencent: TAD Sim Tencent veröffentlichte 2018 die Simulationsplattform TAD Sim, die eine Kombination aus virtuellem und realem, online basierendem, auf einer professionellen Game-Engine basierendem, industrietauglichem Fahrzeugdynamikmodell sowie integriertem virtuellen und realen Verkehr darstellt Fluss und andere Technologien. Die nächste integrierte autonome Fahrsimulationsplattform kann geometrische Wiederherstellung, logische Wiederherstellung und physische Wiederherstellung von Szenen realisieren. TAD Sim unterstützt auch den Cloud-Betrieb, einschließlich szenenbasierter Cloud-Simulation und virtueller stadtbasierter Cloud-Simulation. Die Simulation kann sowohl eine beschleunigte Simulation als auch eine Simulation mit hoher Parallelität erreichen, um verschiedene Szenarien und Fahrmöglichkeiten in der realen Welt zu erfüllen und den autonomen Fahrtestprozess des Unternehmens zu beschleunigen. Die Szenariobibliothek enthält mehr als 1.000 Szenariotypen mit einer Kapazität von 10 Millionen Kilometer pro Tag. Diese Technologiegiganten bauen Simulationsplattformen mehr auf, um autonome Fahrsimulationsprozesse aufzubauen Wir konzentrieren uns stärker auf Szenenbibliotheken, um ihr mehr Aufmerksamkeit zu schenken, und haben auch die Upstream- und Downstream-Links bewusster geöffnet, um das Testen und Verifizieren des autonomen Fahrsystems voranzutreiben (1) Simulationssoftware: Sie müssen sowohl Simulation als auch Autos verstehen Als Glied in der Entwicklungskette des autonomen Fahrens muss die Simulation organisch in andere Glieder integriert werden. Herkömmliche Simulationssoftware ist zwar in einigen Bereichen sehr professionell, bereitet jedoch bei der Verbindung mit Upstream- und Downstream-Verbindungen große Probleme. Für Probleme, die während des Straßentests entdeckt wurden, hoffen die Entwickler sicherlich, die Szene in die Simulationsszenenbibliothek aufzunehmen, damit sie später Regressionstests durchführen können. Viele herkömmliche Software unterstützen diese Funktion jedoch nicht und können dies nur tun Wenn Sie eine Szenenbibliothek manuell erstellen möchten, ist die Effizienz beim manuellen Erstellen einer Szenenbibliothek sehr gering, und Sie können nicht mehrere an einem Tag erstellen. Zum Beispiel kann einige herkömmliche Simulationssoftware nur in der WINDOWS-Umgebung ausgeführt werden, aber jetzt befindet sich die Umgebung für die Entwicklung autonomen Fahrens in der Ubuntu-Umgebung. Ein weiteres Beispiel: Die Cloud-Parallelsimulationsfunktion herkömmlicher Simulationssoftware ist nicht mit der Cloud-Simulation kompatibel, und einige sind nur in neueren Versionen mit der Cloud-Simulation kompatibel. Da herkömmliche Simulationssoftware Lizenzen verkauft, sind laut einem Branchenexperten mehrere Lizenzen erforderlich, um die Software auf mehreren Computern zu installieren. Da die Cloud-Parallelsimulation eine immer wichtigere Rolle spielt, ist das auf Servicegebühren basierende SaaS-Modell offensichtlich kundenfreundlicher und stellt auch einen Folgeentwicklungstrend dar. Auch das traditionelle Vertriebsmodell für Simulationssoftwarelizenzen muss entsprechend angepasst werden. Parallele Simulation in der Cloud kann zweifellos die Effizienz der autonomen Fahrentwicklung erheblich verbessern. Die Simulationsplattformen von Giganten wie Huawei, Baidu und Tencent können sich nahtlos mit ihren Cloud-Plattformen verbinden Simulation und kann in privaten Clouds und öffentlichen Clouds bereitgestellt werden. Neben der Bereitstellung von Simulationssoftware integrieren ökologische Giganten auch Simulationsplattformen mit anderen Toolketten in ihre Full-Stack-Lösungen. „Huawei Octopus“ bietet beispielsweise eine One-Stop-Simulations- und Bewertungstoolkette in der Cloud, um DevOps im Bereich des autonomen Fahrens zu realisieren. Vom Code-Warehouse-Zugriff über die Versionsverwaltung bis hin zur Simulation und Bewertung kann ein automatisierter geschlossener Regelkreis realisiert werden . Auf diese Weise wird den Automobilherstellern der Einstieg erleichtert und die Anpassungskosten werden geringer. Allerdings stehen diese Giganten auch vor einer großen Herausforderung: Da es an ausreichender Hardware wie Fahrzeugdynamikmodellen und Kernkomponenten für die Automobilindustrie mangelt, müssen diese Unternehmen relevante Fähigkeiten durch Eigenforschung oder Zusammenarbeit ergänzen. . Beispielsweise entschied sich Baidu für die Entwicklung eines eigenen Fahrzeugdynamikmodells, und Apollo 5.0 fügte ein Fahrzeugdynamikmodell hinzu, das strategisch mit VTD zusammenarbeitete und das Fahrzeugdynamikmodell von CarMaker einbettete. Es wird davon ausgegangen, dass Huawei und Saimu Technology ebenfalls mit dem Aufbau einer Kooperationsbeziehung begonnen haben und Anstrengungen im Bereich der erwarteten funktionalen Sicherheit des autonomen Fahrens (SOTIF) entwickeln werden. (2) Die Szenariobibliothek ist der Kern In der datengesteuerten Entwicklungsverbindung entspricht datengesteuert der „Fragenmeer-Taktik“. Alles, was der Prüfer tun kann, ist, immer schwierigere Fragen zu stellen . Im Systementwicklungslink entspricht die Szenariobibliothek den vom Prüfer gestellten Testfragen zur Bewertung der Qualität der Software. Daher bestimmen Quantität und Qualität der Szenariobibliothek direkt das Niveau des Systems. Szenenbibliotheken stammen im Allgemeinen aus mehreren Quellen: Die meisten auf dem Markt erhältlichen Szenenbibliotheken von Drittanbietern basieren auf Standardvorschriften und Expertenerfahrungsdaten Wenn Sie beispielsweise eine Parkfunktion erstellen möchten, müssen Sie Szenen für das Parken entwerfen, was arbeitsintensiver ist. Für die im Straßentest entdeckten Übernahmeereignisse oder Eckfälle müssen Sie die Szenenbibliothek umgekehrt generieren, was dem entspricht Kandidaten organisieren ihr eigenes „“ auf der Grundlage früherer falscher Fragen. Zusätzlich zu diesen Szenenbibliotheken „erweitern“ Automobilhersteller auch weiterhin ihre eigenen Szenenbibliotheken durch Eckfälle, die bei Straßentests auftreten. Als Reaktion auf diese Nachfrage bieten einige Simulationssoftware, wie zum Beispiel „Huawei Octopus“, die Funktion, „reale Fahrtestszenarien mit einem Klick in Simulationsszenarien umzuwandeln“ und können auf dieser Basis bearbeitet und verallgemeinert werden. Zum Beispiel das Ändern der Wetterumgebung, der Umgebung, Spiegelung und andere Mittel, um mehr Szenarien zu verallgemeinern, und Huawei bietet auch virtuelle und reale Hybridsimulationsfunktionen. Die sogenannte virtuell-reale Hybridsimulation besteht darin, Testszenarien in der Cloud zu erstellen und diese dann zum Fahren in das Fahrzeug zu laden. Auf diese Weise kann das Fahrzeug insbesondere auf offenen Straßen oder abgesperrten Standorten verschiedene virtuelle Szenen simulieren Fußgängerüberwege, Nicht-Kraftfahrzeug-CUT-IN und andere gefährliche Szenarien, sodass der autonome Fahralgorithmus und die Fahrdynamikleistung des tatsächlichen Fahrzeugs getestet werden können, wodurch die Testeffizienz verbessert wird. (3) Simulationsauswertung Die Simulationsauswertung ist möglicherweise der am meisten übersehene Teil des gesamten Simulationssystems. Die Simulationsbewertung umfasst im Wesentlichen zwei Aspekte: Zum einen geht es darum, ob der aktuelle Test als bestanden beurteilt werden kann. Zum anderen geht es um die Konsistenz und Wiederholbarkeit des tatsächlichen Fahrzeugtests Dieselbe Szene, die dem aktuellen Test entspricht. Wie kann beurteilt werden, ob das System eine Szenenbibliotheksprüfung erfolgreich bestehen kann? Die Testfragen wurden veröffentlicht und die Kandidaten haben sie beantwortet. Wie können also KPIs für das autonome Fahrsoftwaresystem „bewertet“ werden? Wenn Sie Prüfer wären, welche Bewertungskriterien fallen Ihnen ein? Ist der Zielpunkt erreicht? Ist es sicher gefahren (keine Kollisionen)? Sind Sie über eine rote Ampel gefahren? Beschleunigen oder bremsen Sie schnell? usw. Es gibt viele Bewertungskriterien, wenn man nur darüber nachdenkt. Was noch problematischer ist, ist, dass verschiedene Szenarien unterschiedliche Schwerpunkte auf die Algorithmusinspektion legen und es sehr wahrscheinlich ist, dass die Bewertungskriterien auch unterschiedlich sind. Die Szenenbibliothek ist voller seltsamer Dinge und die Bewertungsstandards variieren natürlich stark. Aber im Allgemeinen lassen sich die Bewertungskriterien in fünf Hauptaspekte unterteilen: Standardübereinstimmung (ob es den Standardvorschriften entspricht), Fahrsicherheit (ob es sicher genug ist), Fahreffizienz (ob es das Ziel effizient genug erreichen kann). , Kraftstoffverbrauch), Fahrkomfort (ob es komfortabel genug ist) und Fahrintelligenz (ob es intelligent genug ist). Branchenexperten zufolge muss jede Szenenbibliothek beim Aufbau über „maßgeschneiderte“ Bewertungskriterien für das Bestehen oder Nichtbestehen verfügen. Zu diesem Zeitpunkt muss die Simulationssoftware diversifizierte Simulationsbewertungsstandards bereitstellen. Wenn diese nicht bereitgestellt werden, bedeutet dies, dass bestimmte Aspekte nicht bewertet werden können. Daher definiert jede Simulationssoftware auch vorab die Bewertungsstandards der Szenenbibliothek für Kunden, wie z. B. „Huawei Octopus“ aus Sicherheit, Komfort, Zuverlässigkeit, Mensch-Computer-Interaktionserfahrung, Benutzerfreundlichkeit, Compliance usw Insgesamt wurden 200 Bewertungsindikatoren in Dimensionen wie Energieverbrauch und Verkehrseffizienz eröffnet. Um die Simulationsauswertung flexibler zu gestalten, soll Huawei-Insidern zufolge in Zukunft auch die Anpassung und Entwicklung von Simulationsauswertungsstandards durch Kunden unterstützt werden. Die oben erwähnte Integration der Simulationsplattform und der vor- und nachgelagerten Werkzeugketten ist ein relativ großer Schwachpunkt in der Branche, nämlich die horizontale Integration zwischen verschiedenen Simulationssoftware. Die Formate sind nicht kompatibel. Derselbe Automobilhersteller verwendet häufig mehrere Simulationssoftware gleichzeitig. Beispielsweise kann jede Simulationssoftware eine Reihe von Szenariofällen sammeln, die Szenariofallbibliothek wird jedoch von unterschiedlicher Simulationssoftware erstellt , Die Formate sind untereinander nicht kompatibel und die Dateien sind nicht universell einsetzbar. Das liegt tatsächlich daran, dass die gesamte Branche nicht ausreichend standardisiert ist. Um dieses Problem zu lösen, wurde der von ASAM veröffentlichte Simulationsfeldstandard OpenX von vielen Automobilherstellern, Zulieferern und wissenschaftlichen Forschungseinrichtungen anerkannt. Derzeit unterstützt die meiste Simulationssoftware den OpenX-Standard. ASAM entwickelt weitere Standards. ASAM-Simulationsformatstandard (zitiert aus dem China Autonomous Driving Simulation Blue Book 2020) Es gibt immer noch einige Simulationssoftware, die das OpenX-Format derzeit nicht unterstützt. Laut Brancheninsidern: „Einige Simulationssoftwareunternehmen wollen alle Verknüpfungen in ihren eigenen Händen kontrollieren, sich unersetzlich machen und Kunden an sich binden, und sie können sie nicht ändern, selbst wenn sie wollen.“ Dies gilt auch für einige Simulationstestunternehmen In der Vergangenheit ist das die übliche Methode der Giganten, aber sie wollen sich wirklich nicht entführen lassen und hoffen, dass sie eine Standardisierung erreichen und die Migrationskosten senken Anzahl der Menschen, die OpenX nicht unterstützen Im Großen und Ganzen ist die Standardisierung sehr wichtig. Ich glaube, dass mit der Weiterentwicklung der Standardisierung die Dateikompatibilität zwischen verschiedenen Softwareprogrammen in naher Zukunft kein Problem mehr sein wird. Wie wir alle wissen, verwenden viele L2+-Funktionen für autonomes Fahren mittlerweile hochpräzise Karten, insbesondere für L4 Autonomes Fahren und hochpräzise Karten werden zu wichtigen Infrastrukturen. Auch für die autonome Fahrsimulation sind hochpräzise Karten ein unverzichtbares und wichtiges Bindeglied. Der Aufbau vieler Simulationsszenen, wie beispielsweise die Umwandlung der oben erwähnten Fahrtestszene in eine Simulationsszene und die virtuell-reale Hybridsimulation, ist untrennbar mit der Unterstützung hochpräziser Karten verbunden. (1) Compliance-Probleme Hochpräzise Karten haben jedoch auch viele Schwachstellen, die Was zuerst gelöst werden muss, ist ein Compliance-Problem. Derzeit verfügen nur mehr als 20 inländische Unternehmen über Vermessungs- und Kartierungsqualifikationen der Klasse A. Huawei, Alibaba, Tencent, Baidu, Xiaomi und Didi verfügen alle über diese Qualifikation. Unter den Automobilherstellern verfügen auch SAIC China Haiting, Geely Yikatong und Xpeng Motors, die kürzlich Zhitu Technology übernommen haben, über Vermessungs- und Kartierungsqualifikationen der Klasse A. Bai „Die staatliche Aufsicht in diesem Bereich ist nicht zu streng und wird in Zukunft noch strenger werden.“ Um Compliance-Probleme für Massenproduktionslösungen zu lösen, werden Automobilunternehmen in diesem Zusammenhang qualifizierte Kartendienstleister zur Zusammenarbeit auswählen. Kartendienstanbieter müssen eine leistungsstarke und zuverlässige Infrastruktur aufbauen, die die Sicherheits- und Compliance-Anforderungen erfüllt und die sichere Speicherung umfangreicher Kartendaten effektiv unterstützen kann. Sie sollten außerdem über leistungsstarke Rechenressourcen und intelligente Algorithmen zur Desensibilisierung von Fahrtestdaten verfügen Gleichzeitig muss das System auch Drittpartner bei der Durchführung intelligenter Fahrentwicklungs- und Kartendatenanwendungsdienste effektiv unterstützen. (2) Probleme mit der Genauigkeit komplexer Szenen Autobahnen und Schnellstraßen, aber die Kartenqualität ist immer noch nicht optimistisch und es wird immer noch fehlende und falsche Markierungen geben. Brancheninsider sagten gegenüber Jiuzhang Zhijia, dass die hochpräzise Kartenabdeckung von Hochgeschwindigkeitsabschnitten durch einen führenden Kartendienstleister unvollständig sei, insbesondere für Auffahrten zur Autobahn und An Mautstellen und Raststätten kann es zu Abweichungen oder Unterdeckungen kommen. Bei der Kommunikation mit dem Verantwortlichen für hochpräzise Karten eines Automobilunternehmens teilte der Verantwortliche Jiuzhang Zhijia mit, dass bei der Durchführung von L4-Robotaxi-Tests die Das Hauptszenario war: Auf städtischen Straßen gibt es weniger Kartendienstanbieter, die diesen Teil abdecken können, und die Qualität und Aktualisierungshäufigkeit sind nicht hoch. Sie müssen selbst hochpräzise Karten sammeln und erstellen. Daher sollten hochpräzise Karten nicht nur die Abdeckung von Autobahnen stärken, sondern sich auch auf die Lösung des Abdeckungsproblems städtischer Pendlerszenen konzentrieren und die Genauigkeit komplexer Straßen verbessern Bedingungen. Nur so kann die unterstützende Rolle hochpräziser Karten für autonomes Fahren verbessert und gleichzeitig die Simulation und Erprobung autonomen Fahrens in komplexen urbanen Szenen wirksam unterstützt werden. (3) Problem der dynamischen Aktualisierung Hochpräzise Karten müssen auch das Problem der Dynamik lösen Andernfalls können die Daten, sobald sie ihre Aktualität verlieren, nicht nur das intelligente Fahren nicht mehr wirksam unterstützen, sondern können auch Sicherheitsrisiken verursachen. Derzeit glauben viele Brancheninsider, dass das Karten-Crowdsourcing-Aktualisierungsmodell in Zukunft eine Mainstream-Technologie werden wird, da es hinsichtlich der Aktualität der Aktualisierung und der Erfassungskosten mehr Vorteile bietet. Auch für diese technische Route erforschen und führen relevante inländische Kartendienstanbieter ständig entsprechende technische Tests durch. Crowdsourcing-Kartenaktualisierungen stehen nicht nur vor vielen technischen Herausforderungen, wie z. B. unterschiedlichen Datenquellen, ungleichmäßiger Qualität, inkonsistenten Standards für Sammlungselemente, Interoperabilität zwischen Cloud-Gerät und Fahrzeug usw., sondern auch mit Einschränkungen durch nationale Gesetze und Vorschriften, die Risiken wie z B. Filterung sensibler geografischer Informationen, Verschlüsselung von Kartendaten und Verlust der Privatsphäre, und erfordert eine weitere Gesamtplanung durch die zuständigen nationalen Abteilungen. Tatsächlich ist die Lösung der dynamischen Aktualisierung hochpräziser Karten ein systematisches Projekt, das die Aggregation und Integration mehrerer Ressourcen und Daten sowie die Zusammenarbeit von erfordert Cloud- und Edge-Geräte In Zukunft wird dies über Kartendienstanbieter, intelligente vernetzte Fahrzeuge, verschiedene Verkehrsteilnehmer, Straßeninfrastruktur, Edge Computing und Cloud-Zusammenarbeit sowie Verkehrs-Big Data, Straßenbau- und -wartungsdaten und Straßenbetreiber erfolgen und andere Parteien arbeiten zusammen, um dynamische Aktualisierungen hochpräziser Karten zu erreichen und die Aktualität hochpräziser Kartendaten zu verbessern. Nach Ansicht des Autors ist die Erstellung und Aktualisierung hochpräziser Karten ein riesiges Projekt. Wenn ein einheitlicher Standard für hochpräzise Kartenelemente gebildet werden kann, können mehrere Ressourcen koordiniert und koordiniert werden, sich wiederholende Arbeiten können reduziert werden und a Es kann gemeinsam eine Karte des Landes erstellt werden, was erheblich sein wird. Es wird ein Segen sein, die Branchenkosten zu senken, die Brancheneffizienz und Datenzuverlässigkeit zu verbessern und Datensicherheitsrisiken zu reduzieren. Bei der datengesteuerten Systementwicklung, sei es die Speicherung von Umfangreiche Datenmengen, Modelltraining oder parallele Simulationstests – all das erfordert große Mengen an IT-Ressourcen. Brancheninsider sagten gegenüber „Nine Chapters Smart Driving“, dass sie bei der Entwicklung autonomer Fahrsysteme plötzlich auf einige plötzliche Anforderungen an die Rechenleistung stoßen werden, wie z Rechenleistung wird sein Bei Servern kann der Genehmigungsprozess mehrere Monate dauern, was sich stark auf den Entwicklungsfortschritt auswirkt. Es wird davon ausgegangen, dass die Tochtergesellschaft eines bestimmten Automobilherstellers für die Entwicklung intelligenter Fahrsysteme, um dieser Nachfrage gerecht zu werden, bei der Planung eines neuen Bürogebäudes eine gesamte Etage des Bürogebäudes als Computerraum vorgesehen hat. Ob es um Speicherung oder Schulung geht, es gibt tatsächlich eine sehr gute Möglichkeit, mit dieser plötzlichen Nachfrage umzugehen, nämlich in die Cloud zu gehen. Der Wechsel in die Cloud bietet viele Vorteile. Beispielsweise ist die Cloud-Entwicklungsumgebung gut kompatibel, eine schnelle elastische Erweiterung kann die Entwicklungseffizienz verbessern und es gibt auch Vorteile hinsichtlich Kosten und Datensicherheit. Im Vergleich zu selbst gebauten Computerräumen sind die Vorteile des Wechsels in die Cloud Im besonderen Kontext der neuen Coronavirus-Epidemie ist die digitale Transformation für Unternehmen zum Überlebensweg geworden. Wenn Unternehmen als Reaktion auf die Epidemie Online-Geschäfte in Echtzeit realisieren und Service-Szenarien von offline auf online verlagern wollen, müssen sie sich einer digitalen Transformation unterziehen und Mitarbeiter, Kunden, Services und Prozesse durch Cloud-Meetings, Cloud-Beschaffung, Cloud-Verkäufe und Cloud integrieren Unterschreiben usw. Vollständig online. Je höher der Grad der digitalen Entwicklung, desto vorteilhafter ist er für die Entwicklung von Unternehmen. IDC-Forschungsdaten haben ergeben, dass die Rentabilität von Unternehmen mit einem hohen Digitalisierungsindex sogar mehr als fünfmal höher ist als der Durchschnitt. Die Branche ist allgemein davon überzeugt, dass der Wechsel in die Cloud der einzige Weg oder sogar der erste Schritt ist: „Die Digitalisierung muss zuerst in die Cloud gehen.“ Der Wechsel in die Cloud ist eine notwendige Option, um eine geschlossene Entwicklungsverbindung für autonome Fahrdaten herzustellen. Nehmen Sie als Beispiel den Optimierungslink von „Huawei Octopus“ auf Corner Case. Nach der manuellen Übernahme auf der Fahrzeugseite wird „Huawei Octopus“ automatisch ausgelöst und gibt Rückmeldungen online an die Cloud weiter Wenn bestätigt, dass es sich um eine eigene Verantwortung des Fahrzeugs handelt (eigenes Systemproblem), lädt der Datenerfassungsdienst die gültigen Daten vor und nach der Übernahme in die Cloud hoch und tritt in den Datenverarbeitungsprozess ein. Wenn die Wahrnehmungsverbindung optimiert werden muss, werden Daten erfasst, bereinigt und kommentiert. Nach der Verarbeitung wird das Wahrnehmungsmodul in der Cloud trainiert, wenn das Planungskontrollmodul optimiert werden muss Szenario wird mit einem Klick in eine Simulationsszenario-Bibliothek umgewandelt. Das optimierte Algorithmussystem muss parallelen Simulationstests und Regressionstests unterzogen werden. Wenn die Simulationsbewertung ebenfalls erfolgreich ist, wird der OTA-Push-Dienst in der Cloud gestartet, um das fahrzeugseitige System zu aktualisieren. „Huawei Octopus“-Daten-Closed-Loop-Link zur Cloud ist der einzige Weg für autonomes Fahren von der Entwicklungs- und Testphase bis zur Kommerzialisierung. Derzeit konzentrieren sich die meisten Automobilhersteller noch auf Entwicklung und Tests, wobei die Anzahl der Testfahrzeuge zwischen einigen wenigen und Dutzenden liegt. Mit zunehmender Anzahl der Testfahrzeuge wird sie jedoch in Zukunft Zehntausende von Fahrzeugen erreichen Durch die Massenproduktion wird auch die Menge der täglich generierten Daten von Hunderten/Tausenden auf 10 PB steigen, und die für das Training und die parallele Simulation erforderliche GPU-Rechenleistung wird bis dahin ebenfalls von Dutzenden auf Tausende ansteigen wird immer dringlicher. Nachdem wir die Vorteile des Wechsels in die Cloud verstanden haben, werfen wir einen Blick auf die Klassifizierung von Cloud Computing. Clouds werden im Allgemeinen in drei Kategorien unterteilt: Public Cloud, Private Cloud und Hybrid Cloud. Die öffentliche Cloud basiert auf einer nicht benutzereigenen Infrastruktur und kann einer Cloud zur Nutzung durch mehrere Mandanten zugewiesen werden. Zu den am häufigsten genannten Cloud-Dienstanbietern gehören Amazon AWS und Alibaba Cloud , Huawei Cloud und Tencent Cloud usw. Private Cloud wird im Allgemeinen für einen einzelnen Kunden erstellt, und die Zugriffsrechte liegen ausschließlich bei diesem Kunden. Kunden können wählen, ob sie sie in ihrem eigenen Computerraum erstellen möchten (private Bereitstellung) oder Hosting-Dienste in der Cloud bereitstellen möchten Computerraum des Dienstleisters (Hosted Private Cloud). Hybrid Cloud kann im Allgemeinen als eine Kombination aus Private Cloud und Public Cloud oder als Public Cloud unter Verwendung verschiedener Dienstanbieter angesehen werden. Man geht allgemein davon aus, dass öffentliche Clouds schnell erweitert werden können und besser für Workloads mit hoher Nachfrage oder Schwankungen geeignet sind. Um private Clouds zu erweitern, müssen jedoch neue Hardware und Ressourcen gekauft oder geleast werden, was deutlich komplizierter ist. Im Zuge der Entwicklung des autonomen Fahrens steigt einerseits der Speicherbedarf exponentiell, andererseits kommt es während der Entwicklung häufig zu einem plötzlichen Bedarf an großer Rechenleistung (Cloud-Training oder parallele Simulation). , usw.). Angesichts dieser Nachfrage wird die öffentliche Cloud besser geeignet sein. Den Entwicklungstrends des Cloud Computing nach zu urteilen, nimmt der Anteil des öffentlichen Cloud-Marktes von Jahr zu Jahr zu, während der Anteil der privaten Cloud von Jahr zu Jahr abnimmt. Daten von iiMedia Consulting zeigen, dass auf dem chinesischen Cloud-Computing-Markt im Jahr 2020 der Umfang der öffentlichen Cloud die private Cloud im Jahr 2019 übertraf und zum ersten großen Markt wurde. Bei der Kommunikation mit „Nine Chapters Smart Driving“ äußerten die Mitarbeiter des Automobilherstellers zwar die Vorteile der öffentlichen Cloud, äußerten jedoch auch Bedenken hinsichtlich der Datensicherheit: „Meine Daten werden in der öffentlichen Cloud abgelegt. Wird es von anderen missbraucht?“, sagte ein Mitarbeiter der Automobilfirma. Gerade wegen dieser Bedenken werden sich viele Automobilhersteller dafür entscheiden, ihre eigenen Server zu bauen oder sich für private Clouds zu entscheiden. Einige Automobilhersteller werden sich für Hybrid-Clouds entscheiden, das heißt, die Unternehmen werden nur einige Dienste betreiben, die keine Daten beinhalten Sicherheit und Datenschutz in der öffentlichen Cloud und führen Sie andere Dienste in der privaten Cloud aus. Obwohl sich einige führende Automobilunternehmen und neue Automobilhersteller für die öffentliche Cloud entscheiden, entscheiden sie sich bei der Auswahl eines öffentlichen Cloud-Dienstleisters für einen Dienstanbieter, mit dem sie eine Eigenkapitalbeziehung haben. „Schließlich sind sie ihre eigenen Leute.“ Sie müssen sich keine Sorgen um die Datensicherheit machen.“ Sie erklären es so. Die Basis des Vertrauens ist gegenseitiges Verständnis und Vertrautheit. Misstrauen ist oft auf mangelndes Verständnis zurückzuführen, beispielsweise beim Cloud Computing. Für Unternehmen, die in die Cloud migrieren, ist der ordnungsgemäße Schutz ihrer Cloud-Daten die wichtigste und grundlegendste Sicherheitsanforderung. Dies ist auch die „Lebensader“ für Cloud-Dienstleister, um das Vertrauen der Kunden zu gewinnen. Laut der Einleitung in „Alibaba Economy Cloud Native Practice“ lassen sich die Anforderungen der Kunden an die Datensicherheit durch die drei Grundelemente der Informationssicherheit „CIA“ zusammenfassen, nämlich Vertraulichkeit (Confidentiality) und Integrity (Integrität) sowie Verfügbarkeit . Vertraulichkeit bedeutet insbesondere, dass nur legale (oder erwartete) Benutzer auf geschützte Daten zugreifen können. Zu den wichtigsten Implementierungsmethoden gehören Datenzugriffskontrolle, Datenleckverhinderung, Datenverschlüsselung und Schlüsselverwaltung (oder erwartete) Benutzer können Daten ändern, was hauptsächlich durch Zugriffskontrolle erreicht wird. Gleichzeitig können Überprüfungsalgorithmen verwendet werden, um die Integrität der Benutzerdaten während der Datenübertragung und -speicherung sicherzustellen Dies spiegelt sich in den allgemeinen Sicherheitsfunktionen, den Disaster-Recovery-Funktionen und der Zuverlässigkeit der Cloud-Umgebung sowie in der normalen Funktionsgarantie verschiedener verwandter Systeme in der Cloud wider (Speichersysteme, Netzwerkzugriff, Mechanismen zur Identitätsauthentifizierung, Mechanismen zur Berechtigungsüberprüfung usw.). . Unter diesen drei Aspekten ist die Datenverschlüsselung das wichtigste technische Mittel zur Gewährleistung der Vertraulichkeit (Vertraulichkeit), und es handelt sich um eine vollständige Link-Datenverschlüsselungsfunktion. „Full-Link-Verschlüsselung“ bezieht sich auf die Fähigkeit zum Schutz der End-to-End-Datenverschlüsselung sowie auf die Verschlüsselung des gesamten Lebenszyklus von Daten. Es bezieht sich hauptsächlich auf den Übertragungsprozess von der Off-Cloud zur On-Cloud. Cloud und zwischen On-Cloud-Einheiten, bis hin zum Berechnungsprozess (Verarbeitung/Austausch) von Daten, wenn die Anwendung ausgeführt wird, und der Verschlüsselungsfähigkeit während des Speicherprozesses, bis die Daten schließlich dauerhaft gespeichert und auf der Festplatte abgelegt werden. Im Allgemeinen besteht der Datenverschlüsselungsprozess darin, dass die Klartextdaten durch international und inländisch anerkannte Sicherheitsalgorithmen berechnet werden, um den Datenchiffretext zu erhalten. Bei kryptografischen Vorgängen sind sicher geschützte und verwaltete Schlüssel eine ausreichende und notwendige Voraussetzung für den kryptografischen Schutz. Mit anderen Worten: Die Kontrolle des Schlüssels steuert auch die Initiative des gesamten Verschlüsselungsvorgangs. Da der Benutzer seinen eigenen Hauptschlüssel als Benutzerressource mitbringt und jeder Anruf vom Benutzer autorisiert werden muss, hat der Benutzer die vollständige unabhängige Kontrolle und Initiative über die Verwendung verschlüsselter Daten. Gleichzeitig werden alle Aufrufe von Benutzerressourcen vollständig im Protokollaudit angezeigt, sodass die Transparenz der Cloud-Nutzung verschlüsselter Daten besser gewährleistet ist. Der Lebenszyklus der Datensicherheit ist ein Auszug aus der Cloud-nativen Praxis der Alibaba Economy Viele Leute in der Branche erwähnten bei der Kommunikation mit „Nine Chapters Smart Driving“ auch einen Punkt: Wer kann? Garantie Werden interne Mitarbeiter oder Betriebs- und Wartungspersonal des Cloud-Dienstleisters ihre Berechtigungen nutzen, um meine Daten heimlich zu nutzen? Dabei handelt es sich tatsächlich um Compliance, die durch interne Prozesse sichergestellt werden muss, und dieser interne Prozess wird häufig durch eine Compliance-Zertifizierung durch einen maßgeblichen Dritten bestätigt. Unter ihnen ist ISO27001 die maßgeblichste, am weitesten verbreitete und am weitesten verbreitete Zertifizierung von Informationssicherheitssystemen. Die Compliance-Zertifizierungen aller großen Cloud-Dienstanbieter finden Sie auch auf deren offiziellen Websites. Externe Compliance-Zertifizierung muss auch intern umgesetzt werden. Nehmen wir als Beispiel: Es gibt eine Reihe interner Sicherheitsvorschriften von der Entwicklung bis zum Management. Sobald jemand dagegen verstößt, wird dies sehr streng sein herabgestuft, bestraft usw. Verwarnung, sogar Ausschluss usw. Als er über Compliance-Probleme sprach, scherzte der Huawei-Insider auch, dass die Vereinigten Staaten, nachdem sie begonnen hatten, Sanktionen gegen Huawei zu verhängen, ihr Bestes versucht hätten, weltweit „solide“ Beweise für die „Nichteinhaltung“ von Huawei zu finden. Dass es seit mehr als zwei Jahren nicht mehr gefunden wurde, beweist auch von außen, wie streng Huawei in Sachen Compliance ist. Vor einiger Zeit hat Huaweis Smart-Car-Cloud-Dienst auch die ASPICE L2-Drittanbieter-Zertifizierung bestanden Überprüfung von APSICE (KGAS) PN (potenzieller Lieferant) Dies zeigt auch, dass die F&E-Qualität und der Entwicklungsprozess der intelligenten Auto-Cloud-Dienste von Huawei von den etablierten internationalen Automobilherstellern anerkannt wurden. Vielleicht wäre es aus der Perspektive der Geschäftslogik einfacher zu verstehen. Für Cloud-Dienstleister ist die Sicherheit der Kundendaten das A und O. Kunden vertrauen Ihnen ihr Leben an. Sobald ein Problem auftritt, ist dieses Vertrauen verloren. Und aus Sicht der Architektur des Cloud Computing selbst werden auch Daten in der Cloud sicherer: Einerseits werden Cloud-Dienstanbieter Datensicherungen für die externe Notfallwiederherstellung durchführen (um Datenverluste durch Naturkatastrophen wie z. B. zu verhindern). Brände), andererseits wird auch das Sicherheitsniveau höher sein (mehr Sicherheitstalente, mehr Sicherheitsmaßnahmen vorhanden). Obwohl die Umstellung auf die Cloud ein allgemeiner Trend für Automobilunternehmen ist, wird dies nicht über Nacht geschehen. Es bedarf eines Prozesses, bis Automobilunternehmen die öffentliche Cloud verstehen und akzeptieren. Ein öffentlicher Cloud-Vermarkter sagte gegenüber „Nine Chapters Smart Driving“, dass autonome Fahrunternehmen und ausländische Automobilunternehmen mit Internethintergrund relativ gesehen eher dazu bereit sind, in die Cloud zu wechseln Sorgen wegen der Daten. Es wird noch mehr geben. Aus Sicht des Entwicklungstrends der Cloud-Computing-Branche haben verschiedene Branchen unterschiedliche Verständnisse von Cloud, und die Nutzungsrate von Cloud Computing ist laut Frost & Sullivan-Daten auch die Hauptnutzer von Cloud Computing in China Derzeit liegt der Schwerpunkt auf Cloud-Anwendungen wie dem Internet, dem Finanzwesen und der Regierung. In den traditionellen Bereichen macht die Cloud-Branche derzeit etwa 29 % aus Branchen wie Transport, Logistik und Fertigung verbessern sich rasch. Ich glaube, dass die Akzeptanz der Cloud in Zukunft immer größer werden wird, wenn Automobilunternehmen ihr Verständnis für Cloud Computing vertiefen und den Prozess der digitalen Transformation beschleunigen. In naher Zukunft dürfte es kein Problem mehr sein, nicht auf die Cloud zugreifen zu können. Derzeit ist das größte Problem für Automobilunternehmen bei der Entwicklung autonomer Fahrsysteme die gegenseitige Segmentierung von Werkzeugketten und Dateninseln. Herkömmliche Tool-Chain-Unternehmen und Start-ups konzentrieren sich häufig auf ein bestimmtes Glied in der Tool-Chain. Beispielsweise führen diejenigen, die Simulationen durchführen, Simulationen durch, und diejenigen, die Annotationen durchführen, führen Annotationen durch Ein Teil der gesamten Entwicklungstoolkette wird in Reihe verwendet. Wenn Sie sich nur auf ein bestimmtes Glied in der Mitte konzentrieren, wird es unweigerlich mit anderen Gliedern „fehlausgerichtet“ sein. Darüber hinaus mangelt es der aktuellen Werkzeugkette an Industriestandards. Jedes Unternehmen ist sehr unterschiedlich und die Kunden müssen viel Zeit für die Anpassung aufwenden. Daher hoffen die Automobilhersteller, dass ein einziger Lieferant mehrere Glieder der Werkzeugkette verbinden kann eigene Anpassungskosten. Technologiegiganten erkannten diese Chance und traten mit der „Tool-Chain-Ökologie“ auf den Markt und stellten Full-Stack-Tool-Chains bereit. Das Folgende ist eine Bestandsaufnahme der Ökologie der Technologiegiganten: (1) NVIDIA: Chip-basierte Ökologie Der Chipriese NVIDIA hat eine einheitliche Architektur und GPU-Hardware rund um das Auto aufgebaut. Desktop und Cloud Mit der CUDA-Softwarearchitektur können Entwickler komplexe Deep-Learning-Modelle mit sehr einfachen Anweisungen aufrufen. „Nine Chapters Smart Driving“ erfuhr aus dem Austausch mit Branchenexperten, dass der wichtige Grund, warum sie sich für NVIDIA entschieden haben, darin besteht, dass NVIDIA über eine stabile Toolkette und ein reichhaltiges Software-Ökosystem verfügt. Der Vorteil einer ausgereiften Toolkette besteht darin, dass Sie das Problem schnell lokalisieren können, wenn etwas schief geht. 2017 veröffentlichte NVIDIA die autonome Fahrplattform NVIDIA DRIVE, die auch mit den selbst entwickelten Softwarearchitekturen Drive AV und Drive IX ausgestattet ist. Fahrzeuginterner intelligenter Fahrcontroller für die NVIDIA DRIVE-Plattform. Die Xavier-Serie ist derzeit auf dem Markt und der neueste Orin soll 2022 in Serie produziert werden und den funktionalen Sicherheitsstandard ISO 26262 ASIL-D erfüllen. Im Bereich Simulation hat NVIDIA 2018 das Simulationssystem Drive Constellation und Drive Sim auf den Markt gebracht. NVIDIA stellte 2019 auch seine hochpräzise Positionierungslösung DRIVE Localization vor. Darüber hinaus plant NVIDIA auch eine hochpräzise Karten-Crowdsourcing-Lösung NVIDIA MapWorks. Derzeit hat NVIDIA eine Forschungs- und Entwicklungskooperation für autonomes Fahren mit Mercedes-Benz, Audi, Toyota, Volvo, Bosch, Continental und anderen Unternehmen aufgebaut. (2) Huawei: Ein offenes Ökosystem aus Cloud-, Tube-, Terminal- und Kernkombination Huawei hält an der Strategie fest, „keine Autos zu bauen, sich auf IKT-Technologie zu konzentrieren und Autounternehmen beim Bau guter Autos zu helfen“. In Chips, Cloud, Software und Hardware, Toolketten, hochpräzisen Karten und anderen Aspekten werden Anstrengungen unternommen, um einen „Kombinationsschlag“ zu bilden, um ein offenes Ökosystem zu bilden. Huawei Intelligent Driving Computing Platform MDC integriert Huaweis selbst entwickelte CPU, AI-Chip und andere Steuerchips und integriert die Optimierung der zugrunde liegenden Software und Hardware, um eine branchenführende Gesamtleistung zu erzielen. Darüber hinaus verfügt Huawei MDC auch über eine vollständige Testplattform und Toolkette, die eine Komplettlösung für die MDC-Entwicklung bietet. Auf der Hardware der MDC-Plattform laufen das intelligente Fahrbetriebssystem AOS/VOS und MDC Core. Mit anderen Worten: MDC verfügt über Software und Hardware in Automobilqualität, die für Automobilhersteller bequem für die Massenproduktion von Modellen geeignet ist. MDC-Gesamtarchitekturdiagramm – aus Huawei MDC-Whitepaper Im Bereich der Entwicklungstoolkette für autonomes Fahren hat Huawei einen Cloud-Service für autonomes Fahren eingeführt. Darüber hinaus hat Huawei auch Cloud-Dienste für das Internet der Fahrzeuge (intelligentes Fahren, intelligente Cockpit-Datenerfassung und -speicherung), Cloud-Dienste für drei Energiequellen (Cloud-Management und Steuerung von drei Energiesystemen) und hochpräzise Karten-Cloud-Dienste eingeführt. Darüber hinaus hat Huawei sowohl weiche als auch harte Maßnahmen zum Einsatz von Sensoren für autonomes Fahren umgesetzt. (3) Baidu: Apollo Open Platform Im Jahr 2017 veröffentlichte Baidu die selbstfahrende offene Plattform Apollo, um Partnern in der Automobilindustrie und den Bereichen autonomes Fahren eine offene, vollständige und sichere Software bereitzustellen. Die Apollo-Plattform ist ein vollständiger Satz von Software-, Hardware- und Servicesystemen, der vier Teile umfasst: Fahrzeugplattform, Hardwareplattform, Softwareplattform und Cloud-Datendienste. Sie kann Partnern helfen, Fahrzeuge und Hardwaresysteme zu kombinieren, um schnell ein eigenes autonomes Fahren aufzubauen System. Apollo hat die Modernisierung fortgesetzt und Lösungen wie visuelles autonomes Hochgeschwindigkeitsfahren in begrenzten Bereichen, autonomes Parken (Valet Parking), unbemannte Betriebsfahrzeuge (MicroCar), automatische Shuttlebusse (MiniBus) und autonomes Fahren in komplexen städtischen Gebieten eröffnet Straßen und begann mit dem Aufbau einer eigenen Robotaxi-Flotte und der Durchführung von Testeinsätzen an verschiedenen Orten unter der Marke „Carrot Run“. Erwähnenswert ist, dass Apollo die Middleware Cyber RT veröffentlicht hat, um die Sicherheit des autonomen Fahrsystems zu verbessern. Entwickler des Apollo-Ökosystems bieten Cloud-basierte Systemsimulationsdienste und das Augmented-Reality-Simulationssystem für autonomes Fahren AADS. Anfang 2021 gründeten Baidu und Geely ein Joint Venture, Jidu Automobile, und gaben das Ende der Automobilproduktion bekannt. Robin Li erklärte öffentlich: „Der Zweck der Gründung von Jidu Automobile besteht darin, die autonome Fahrtechnologie und die Smart-Cockpit-Technologie von Baidu zu fördern.“ zum Markt.“ (4) Tencent: Full-Link-Cloud-Service und Entwicklungsplattform Tencent legt außerdem eine Entwicklungsplattform für das Cloud-Ökosystem für autonomes Fahren vor. Tencent baut keine Autos oder Sensoren, sondern stellt lediglich Software und Dienstleistungen bereit. Auf der Autoseite bietet Tencent Lösungen, die Wahrnehmung, Positionierung, Planung, Entscheidungsfindung und Kontrolle in der Cloud umfassen. Basierend auf Cloud-Speicher und Rechenleistungsunterstützung hat Tencent ein Datenerfassungsmanagement und eine Probenkennzeichnung entwickelt. und Algorithmenschulung und -bewertung, Diagnose und Debugging, Cloud-Simulation (Simulationsplattform TAD Sim), Cloud-Dienste mit geschlossenem Regelkreis für echte Fahrzeuge, Bereitstellung von Cloud-Diensten mit vollständiger Verbindung und Entwicklungsplattformen, die Forschung und Entwicklung im Bereich autonomes Fahren unterstützen. Tencents Geschäftslayout und Positionierung für autonomes Fahren (zitiert aus Tencent Su Kuifengs öffentlichem Online-Sharing) Die Full-Stack-Toolkette weist offensichtliche Effizienzverbesserungen auf, insbesondere die Fähigkeit, schnell eine Pipeline aufzubauen . „Huawei Octopus“-Insider sagten: „Wenn die einzelnen Tool-Chain-Lösungen jedes Unternehmens verwendet werden, kann es mehrere Monate dauern, bis der Link vollständig debuggt ist.“ Die Integration und Anpassung ist jedoch bereits abgeschlossen Darüber hinaus stellt Huawei seinen Kunden eine Reihe von Referenzalgorithmen zur Verfügung, mit denen sie die Fehlersuche und -optimierung erheblich vereinfachen können Der gesamte Prozess. Vollständiger Link, sehr effizient. Der Grund, warum sich viele Automobilhersteller für die Entwicklung selbst entwickelter Werkzeugketten entscheiden, sind einerseits Effizienzüberlegungen und andererseits „Sicherheitsüberlegungen“. Auch Automobilunternehmen wollen ihre bisherige Kontrollposition im Ökosystem beibehalten, sie mögen instinktiv das potenzielle Risiko, „stecken zu bleiben“, und arbeiten daher oft gerne mit kleinen Unternehmen in der Werkzeugkette zusammen. In Bezug auf Offenheit haben verschiedene Technologiegiganten unterschiedliche Strategien. Laut einem Entwickler für autonomes Fahren bei einem bestimmten Automobilhersteller ist die Ökologie der autonomen Fahrentwicklungsplattform eines bestimmten Unternehmens nicht entkoppelt. Sie müssen „alles akzeptieren, aber nicht die Verwendung eines einzelnen Moduls akzeptieren“, um Kunden tief zu binden. Huawei hat einen anderen Weg gewählt – die Entkopplung jedes Moduls. Laut Huawei-Insidern ist die Toolkette von „Huawei Octopus“ in vier Teile unterteilt: Daten, Schulung, Simulation und Überwachung. Diese vier Teile sind vollständig offen, entkoppelt und ungebunden und können von Kunden ersetzt werden jederzeit. Wenn die vorhandenen technischen Reserven den Massenproduktionsplan nicht unterstützen können, können sie die Massenproduktion nur auslagern. Dies scheint im Widerspruch zur Selbstforschungsstrategie zu stehen. Bei der Kommunikation mit „Nine Chapters Smart Driving“ waren die Antworten der Entwickler von Automobilunternehmen überraschend konsistent: Einerseits sind Massenautos mit externen ADAS-Lösungen ausgestattet, da es sich um Black-Box-Käufe handelt Die Hersteller geben keine Daten preis, aber im Interesse der Wettbewerbsfähigkeit und des Absatzes kompletter Fahrzeuge können die Automobilhersteller diesen „sofortigen Kompromiss“ nur tolerieren. Andererseits haben die Automobilunternehmen auch viel Personal und materielle Ressourcen investiert selbstentwickelte L2+-Lösungen: „Sobald der Selbstforschungsplan ausgereift ist, wird er nach und nach ersetzt und in den Bus gesetzt.“ So wurde Selbstforschung zu „Poesie und Distanz“. Unter Berücksichtigung dieser Anforderungen der Kunden von Automobilunternehmen bietet „Huawei Octopus“ den Kunden eine Vielzahl von Kooperationsmöglichkeiten: „Bei der ersten Option ist Huawei für die Entwicklung und Bereitstellung kompletter Massenproduktionslösungen verantwortlich.“ Bei der einen Option ist Huawei für die Entwicklung verantwortlich und bei der dritten Option stellt Huawei eine Entwicklungstoolkette für autonomes Fahren bereit führt Selbstentwicklung durch und Huawei bietet umfassende After-Sales-Entwicklungsberatungsdienste an. Mit dem Eintritt vieler neuer Tool-Chain-Akteure entwickelt sich die gesamte Branche jedoch in Richtung Reife, und nachfolgende Tool-Chains werden nach und nach offen, standardisiert und standardisiert. Insbesondere Giganten wie Huawei und Nvidia sind mit ihren Ökosystemen ins Spiel gekommen, haben die gesamte Entwicklungskette geöffnet, der Branche Vorbilder gebracht und die Branchenentwicklung vorangetrieben. In den Worten eines Huawei-Insiders ist dies „eine Stärkung der Autonomie Chinas“. treibende Industrie.“ , laufen Sie weiter vorwärts.“ Die Verlagerung des autonomen Fahrens in die Cloud ist ein wichtiger Trend. Mit dem autonomen Fahren auf hohem Niveau entwickelt es sich neben den Anforderungen an Speicher, Rechenleistung und mehr schrittweise weiter Neben anderen Ressourcen erfordert es auch eine hohe Zuverlässigkeit der Infrastrukturdienste und strenge Anforderungen an Leistung, Sicherheit und Skalierbarkeit. Das traditionelle Rechenzentrumsbaumodell wird enorme Baukosten sowie Betriebs- und Wartungsdruck für Entwicklungsunternehmen für autonomes Fahren mit sich bringen. Durch die Unterstützung mehrerer Rechenleistungen kann die öffentliche Cloud die Geschäftsanforderungen an extreme Rechenleistung, Sicherheit, Zuverlässigkeit, Elastizität und Flexibilität für massive Infrastrukturressourcen während des Entwicklungsprozesses des autonomen Fahrens erfüllen, wie z. B. Modelltraining und parallele Simulation, und so eine agile Entwicklung erreichen Autonome Fahralgorithmen mit Iteration. Obwohl die meisten Unternehmen derzeit Zweifel am Public-Cloud-Ansatz haben, glaube ich daher, dass dieses Servicemodell mit der rasanten Entwicklung der gesamten Branche des autonomen Fahrens und der weiteren Vertiefung des Verständnisses der Public Cloud weiter gefördert wird. 2. Datenanmerkung: Outsourcing-Trend und das Streben nach hoher Qualität und niedrigem Preis. Nach dem Auffinden wertvoller Daten sind Datenbereinigung und Datenanmerkung erforderlich.
03 Simulation – der Beschleuniger der autonomen Fahrentwicklung
1. Traditionelle Simulationssoftwareunternehmen
2. Schwachstellen der Simulation
3. Der Standardisierungsentwicklungstrend von Simulationssoftware
4. Hochpräzise Karte, ein unverzichtbarer Bestandteil der Werkzeugkette
04 In die Cloud gehen oder nicht, das ist eine Frage
1 Es gibt viele Vorteile, in die Cloud zu gehen
2. Bedenken hinsichtlich der Datensicherheit

05 Der Entwicklungstrend der Werkzeugketten
1. Effizienz: End-to-End

2. Offen: Entkopplung jedes Moduls
3. Die Kooperationsmethode ist flexibler
Das obige ist der detaillierte Inhalt vonEine ausführliche Diskussion über den aktuellen Status und zukünftige Trends der Entwicklungstoolketten für autonomes Fahren. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr