



原标题:On the Road to Portability: Compressing End-to-End Motion Planner for Autonomous Driving
论文链接:https://arxiv.org/pdf/2403.01238.pdf
代码链接:https://github.com/tulerfeng/PlanKD
作者单位:北京理工大学 ALLRIDE.AI 河北省大数据科学与智能技术重点实验室
论文思路
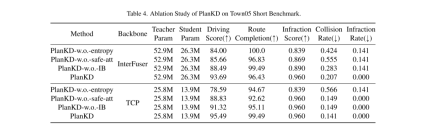
端到端的运动规划模型配备了深度神经网络,在实现全自动驾驶方面展现出了巨大潜力。然而,过大的神经网络使得它们不适合部署在资源受限的系统上,这无疑需要更多的计算时间和资源。为了解决这个问题,知识蒸馏提供了一种有前景的方法,它通过使一个较小的学生模型从较大的教师模型学习来压缩模型。尽管如此,如何应用知识蒸馏来压缩运动规划器到目前为止还未被探索。本文提出了 PlanKD,这是第一个为压缩端到端运动规划器量身定制的知识蒸馏框架。首先,考虑到驾驶场景本质上是复杂的,常常包含与规划无关或甚至是噪声信息,迁移这种信息对学生规划器并无益处。因此,本文设计了一种基于信息瓶颈(information bottleneck)的策略,只蒸馏与规划相关的信息,而不是无差别地迁移所有信息。其次,输出规划轨迹中的不同 waypoints 可能对运动规划的重要性各不相同,某些关键 waypoints 的轻微偏差可能会导致碰撞。因此,本文设计了一个 safety-aware waypoint-attentive 的蒸馏模块,根据重要性为不同 waypoints 分配自适应权重,以鼓励学生模型更准确地模仿更关键的 waypoints ,从而提高整体安全性。实验表明,本文的 PlanKD 可以大幅提升小型规划器的性能,并显著减少它们的参考时间。
主要贡献:
- 本文构建了第一个旨在探索专用知识蒸馏方法以压缩自动驾驶中端到端运动规划器的尝试。
- 本文提出了一个通用且创新的框架 PlanKD,它使学生规划器能够继承中间层中与规划相关的知识,并促进关键 waypoints 的准确匹配以提高安全性。
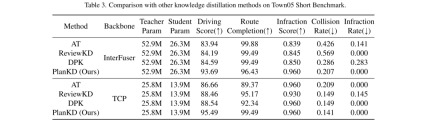
- 实验表明,本文的 PlanKD 可以大幅提升小型规划器的性能,从而为资源有限的部署提供了一个更便携、更高效的解决方案。
网络设计:
端到端运动规划最近作为自动驾驶中的一个有前景的方向出现[3, 10, 30, 31, 40, 47, 48],它直接将原始传感器数据映射到规划的动作上。这种基于学习的范式展现出减少对手工制定规则的严重依赖和减轻在复杂级联模块(通常是检测-跟踪-预测-规划)[40, 48]内错误累积的优点。尽管取得了成功,但运动规划器中深度神经网络庞大的架构为在资源受限环境中的部署带来了挑战,例如依赖边缘设备计算能力的自动配送机器人。此外,即便是在常规车辆中,车载设备上的计算资源也经常是有限的[34]。因此,直接部署深层且庞大的规划器不可避免地需要更多的计算时间和资源,这使得快速响应潜在危险变得具有挑战性。为了缓解这个问题,一个直接的方法是通过使用较小的主干网络来减少网络参数的数量,但本文观察到,端到端规划模型的性能会急剧下降,如图1所示。例如,尽管当 InterFuser [33](一个典型的端到端运动规划器)的参数数量从52.9M减少到26.3M时,推理时间降低了,但其驾驶得分也从53.44下降到了36.55。因此,有必要开发一种适用于端到端运动规划的模型压缩方法。
为了得到一个便携的运动规划器,本文采用知识蒸馏[19]来压缩端到端运动规划模型。知识蒸馏(KD)已经在各种任务中被广泛研究用于模型压缩,例如目标检测[6, 24]、语义分割[18, 28]等。这些工作的基本思想是通过从更大的教师模型继承知识来训练一个简化的学生模型,并在部署期间使用学生模型来替代教师模型。虽然这些研究取得了显着的成功,但直接将它们应用于端到端运动规划会导致次优结果。这源于运动规划任务中固有的两个新出现的挑战:(i) 驾驶场景本质上是复杂的[46],涉及包括多个动态和静态物体、复杂的背景场景以及多方面的道路和交通信息在内的多样化信息。然而,并不是所有这些信息都对规划有益。例如,背景建筑物和远处的车辆对规划来说是无关的甚至是噪音[41],而附近的车辆和交通灯则有确定性的影响。因此,自动地只从教师模型中提取与规划相关的信息至关重要,而以往的KD方法无法做到这一点。 (ii) 输出规划轨迹中的不同 waypoints 通常对运动规划的重要性各不相同。例如,在导航一个交叉口时,轨迹中靠近其他车辆的 waypoints 可能比其他 waypoints 具有更高的重要性。这是因为在这些点,自车需要主动与其他车辆互动,即使是微小的偏差也可能导致碰撞。然而,如何自适应地确定关键 waypoints 并准确地模仿它们是以往KD方法的另一个重大挑战。
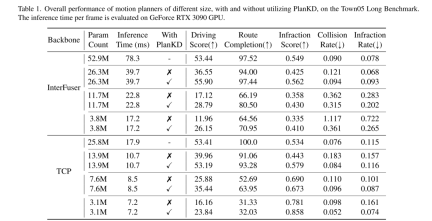
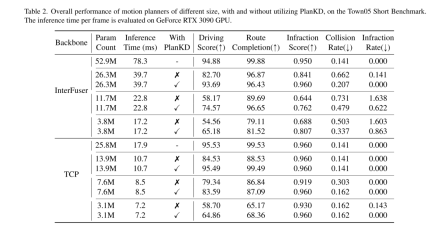
为了解决上述两个挑战,本文提出了第一个为压缩自动驾驶中端到端运动规划器量身定制的知识蒸馏方法,称为 PlanKD 。首先,本文提出了一个基于信息瓶颈原理[2]的策略,其目标是提取包含最少且足够规划信息的与规划相关的特征。具体来说,本文最大化提取的与规划相关特征和本文定义的规划状态的真值之间的互信息,同时最小化提取特征和中间特征映射之间的互信息。这一策略使本文能够只在中间层提取关键的与规划相关的信息,从而增强学生模型的有效性。其次,为了动态识别关键 waypoints 并如实地模仿它们,本文采用注意力机制[38]计算每个 waypoints 及其在鸟瞰图(BEV)中与关联上下文之间的注意力权重。为了在蒸馏过程中促进对安全关键 waypoints 的准确模仿,本文设计了一个 safety-aware ranking loss ,鼓励对于靠近移动障碍物的 waypoints 给予更高的注意力权重。相应地,学生规划器的安全性可以显着增强。如图1所示的证据显示,通过本文的 PlanKD,学生规划器的驾驶得分可以显着提高。此外,本文的方法可以将参考时间降低约50%,同时保持与教师规划器在 Town05 Long Benchmark 上相当的性能。
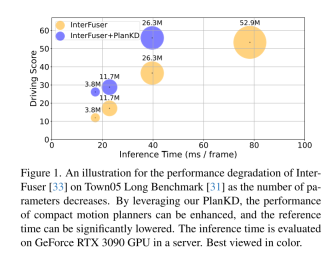
图1. 在 Town05 Long Benchmark [31]上,随着参数数量的减少,InterFuser[33] 性能下降的示意图。通过利用本文的 PlanKD ,可以提升紧凑型运动规划器的性能,并且显着降低参考时间。推理时间在服务器上的 GeForce RTX 3090 GPU 上进行评估。
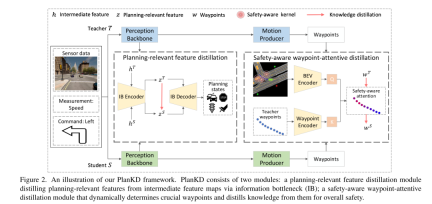
图2. 本文的 PlanKD 框架示意图。 PlanKD 由两个模块组成:一个与规划相关的特征蒸馏模块,通过信息瓶颈(IB)从中间特征映射中提取与规划相关的特征;一个safety-aware waypoint-attentive 蒸馏模块,动态确定关键waypoints ,并从中提取知识以增强整体安全性。
实验结果:
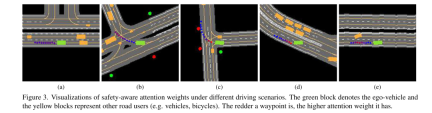
图3. 在不同驾驶场景下,safety-aware 注意力权重的可视化。绿色块代表自车(ego-vehicle),黄色块代表其他道路使用者(例如汽车、自行车)。一个 waypoint 的颜色越红,它的注意力权重就越高。
总结:
本文提出了 PlanKD,这是一种为压缩端到端运动规划器量身定制的知识蒸馏方法。所提出的方法可以通过信息瓶颈学习与规划相关的特征,以实现有效的特征蒸馏。此外,本文设计了一个 safety-aware waypoint-attentive 蒸馏机制,以适应性地决定每个 waypoint 对 waypoint 蒸馏的重要性。广泛的实验验证了本文方法的有效性,证明了 PlanKD 可以作为资源有限部署的便携式和安全的解决方案。
引用:
Feng K, Li C, Ren D, et al. On the Road to Portability: Compressing End-to-End Motion Planner for Autonomous Driving[J]. arXiv preprint arXiv:2403.01238, 2024.
以上是进一步加速落地:压缩自动驾驶端到端运动规划模型的详细内容。更多信息请关注PHP中文网其他相关文章!

 烹饪创新:人工智能如何改变食品服务Apr 12, 2025 pm 12:09 PM
烹饪创新:人工智能如何改变食品服务Apr 12, 2025 pm 12:09 PMAI增强食物准备 在新生的使用中,AI系统越来越多地用于食品制备中。 AI驱动的机器人在厨房中用于自动化食物准备任务,例如翻转汉堡,制作披萨或组装SA
 Python名称空间和可变范围的综合指南Apr 12, 2025 pm 12:00 PM
Python名称空间和可变范围的综合指南Apr 12, 2025 pm 12:00 PM介绍 了解Python功能中变量的名称空间,范围和行为对于有效编写和避免运行时错误或异常至关重要。在本文中,我们将研究各种ASP
 视觉语言模型(VLMS)的综合指南Apr 12, 2025 am 11:58 AM
视觉语言模型(VLMS)的综合指南Apr 12, 2025 am 11:58 AM介绍 想象一下,穿过美术馆,周围是生动的绘画和雕塑。现在,如果您可以向每一部分提出一个问题并获得有意义的答案,该怎么办?您可能会问:“您在讲什么故事?
 联发科技与kompanio Ultra和Dimenty 9400增强优质阵容Apr 12, 2025 am 11:52 AM
联发科技与kompanio Ultra和Dimenty 9400增强优质阵容Apr 12, 2025 am 11:52 AM继续使用产品节奏,本月,Mediatek发表了一系列公告,包括新的Kompanio Ultra和Dimenty 9400。这些产品填补了Mediatek业务中更传统的部分,其中包括智能手机的芯片
 本周在AI:沃尔玛在时尚趋势之前设定了时尚趋势Apr 12, 2025 am 11:51 AM
本周在AI:沃尔玛在时尚趋势之前设定了时尚趋势Apr 12, 2025 am 11:51 AM#1 Google推出了Agent2Agent 故事:现在是星期一早上。作为AI驱动的招聘人员,您更聪明,而不是更努力。您在手机上登录公司的仪表板。它告诉您三个关键角色已被采购,审查和计划的FO
 生成的AI遇到心理摩托车Apr 12, 2025 am 11:50 AM
生成的AI遇到心理摩托车Apr 12, 2025 am 11:50 AM我猜你一定是。 我们似乎都知道,心理障碍包括各种chat不休,这些chat不休,这些chat不休,混合了各种心理术语,并且常常是难以理解的或完全荒谬的。您需要做的一切才能喷出fo
 原型:科学家将纸变成塑料Apr 12, 2025 am 11:49 AM
原型:科学家将纸变成塑料Apr 12, 2025 am 11:49 AM根据本周发表的一项新研究,只有在2022年制造的塑料中,只有9.5%的塑料是由回收材料制成的。同时,塑料在垃圾填埋场和生态系统中继续堆积。 但是有帮助。一支恩金团队
 AI分析师的崛起:为什么这可能是AI革命中最重要的工作Apr 12, 2025 am 11:41 AM
AI分析师的崛起:为什么这可能是AI革命中最重要的工作Apr 12, 2025 am 11:41 AM我最近与领先的企业分析平台Alteryx首席执行官安迪·麦克米伦(Andy Macmillan)的对话强调了这一在AI革命中的关键但不足的作用。正如Macmillan所解释的那样,原始业务数据与AI-Ready Informat之间的差距


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

MinGW - 适用于 Windows 的极简 GNU
这个项目正在迁移到osdn.net/projects/mingw的过程中,你可以继续在那里关注我们。MinGW:GNU编译器集合(GCC)的本地Windows移植版本,可自由分发的导入库和用于构建本地Windows应用程序的头文件;包括对MSVC运行时的扩展,以支持C99功能。MinGW的所有软件都可以在64位Windows平台上运行。

WebStorm Mac版
好用的JavaScript开发工具

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

Dreamweaver Mac版
视觉化网页开发工具

安全考试浏览器
Safe Exam Browser是一个安全的浏览器环境,用于安全地进行在线考试。该软件将任何计算机变成一个安全的工作站。它控制对任何实用工具的访问,并防止学生使用未经授权的资源。

