
Apollo与Carsim/TruckSim合作进行联合仿真

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB转载
- 2024-01-13 16:51:161534浏览
1.背景
仿真在自动驾驶研发中扮演着重要角色,它能够极大地提高研发效率,并为算法的可靠性提供保障。百度Apollo系统作为一款优秀的开源平台,非常适合有意学习自动驾驶的朋友进行研究。此外,Carsim/Trucksim是备受推崇的经典汽车动力学仿真工具。
本文介绍了通过Apollo和Trucksim的联合,实现本地实时仿真的方法。适合初学者搭建仿真平台并研究Apollo系统。
2. 架构设计
Apollo工程的核心代码是用C++实现的。Trucksim的常用接口包括simulink、Python和C语言。本文将首先介绍Apollo、simulink和Trucksim联合仿真的架构,并讨论该仿真系统存在的问题。接下来,将重点讨论Apollo和Trucksim的联合仿真。
2.1 Apollo, simulink和Trucksim方案
Simulink和Apollo可以通过ROS进行通信。由于Apollo的消息数据格式是protobuf,而Simulink的ROS工具只支持标准的ROS消息(ROS msg),因此可以在Apollo中添加一个格式转换的节点来实现兼容。关于Simulink调用Trucksim的方案,网络上有很多资源可供参考,就不再详述了。
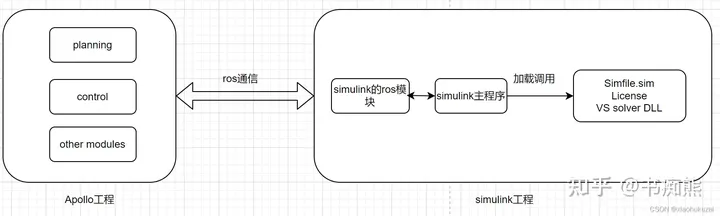
simulink方案图
2.2 Apollo,rosbridge和Trucksim方案
建立QT工程和Apollo工程之间的websocket通信。在Apollo工程中,通过增加rosbridge(或者cyber_bridge)模块实现ros消息(或者cyber消息)与websocket的互转。QT工程作为websocket客户端使用C++实现,并调用Trucksim的动态库,实现实时运行Trucksim的功能。
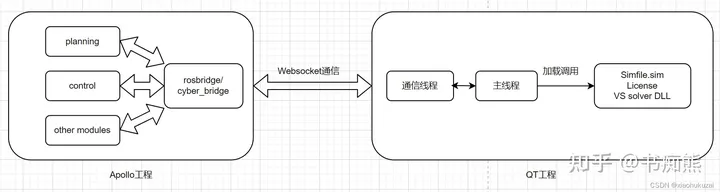
rosbridge方案图
3. 功能实现
3.1 Apollo, simulink和Trucksim方案
3.1.1 Simulink配置
Simulink的工具包中有ROS的支持包,配置ROS网络地址如图2所示。Hostname/IP Address和Port分别为ROS_MASTER_URI的地址和端口号,在上面的通信机制中有说明。
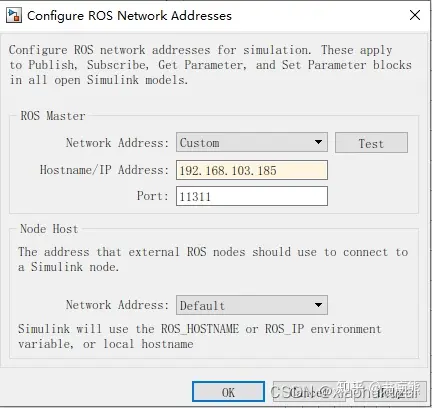
配置ROS网络地址
ROS subscriber接收interface的消息,因此Topic, Message type, Sample time要与interface中程序相对应。

配置ros subcribe
为了便于调试验证,现在MATLAB端启动ROS。配置过程如下:
MATLAB设置的指令:
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')
3.1.2 TruckSim配置
配置界面
Trucksim是向导式编程,参数配置界面:卡车选择5A Tractor(SS_SSS),具体参数见图3.控制界面:Models选择simulink。
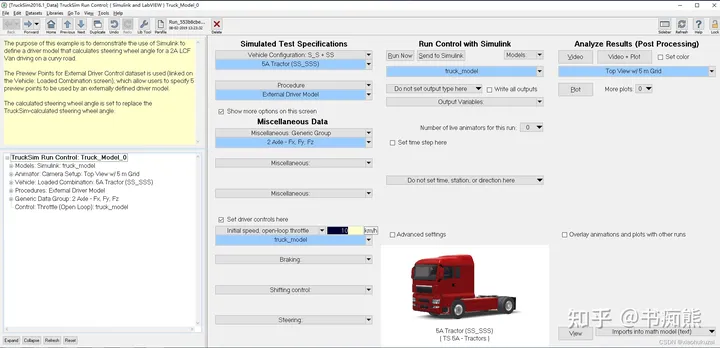
主界面
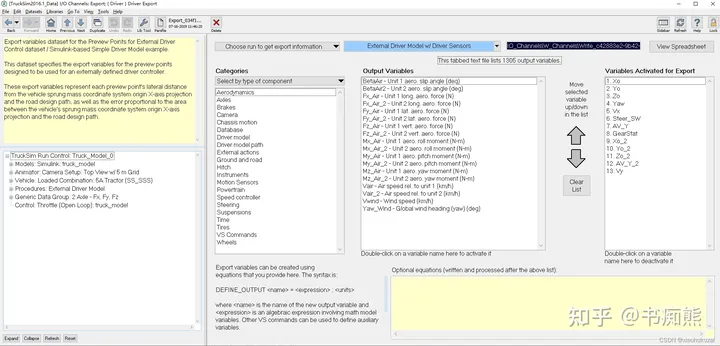
输入参数配置界面
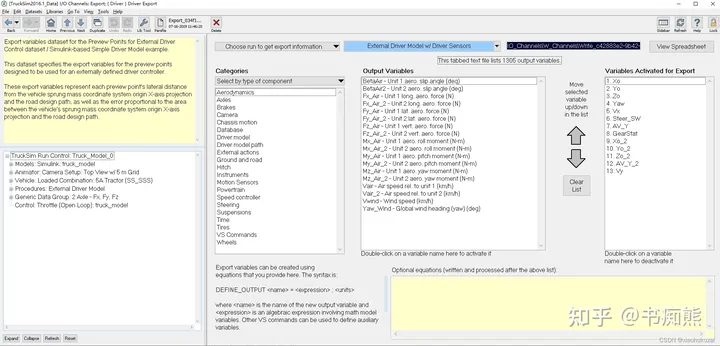
输出参数配置界面
3.2 Apollo, rosbridge和Trucksim方案
3.2.1 apollo中配置rosbridge
rosbridge安装网上教程较多,本文不再赘述。
使用方法如下:
cd ros_pkgs_ws
catkin_make
启动rosbridge
source /apollo/ros_pkgs_ws/devel/setup.bash
PATH=/usr/local/miniconda2/bin:$PATH
roslaunch rosbridge_server rosbridge_websocket.launch
3.2.1 Qt工程配置说明
3.2.1.1 Qt和CMake版本信息

3.2.1.3 Apollo工程和QT工程的接口定义
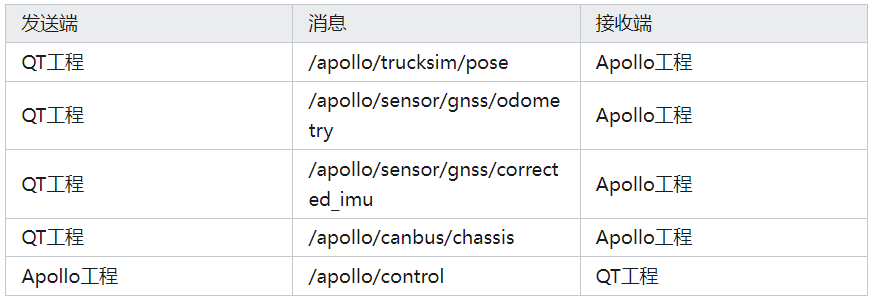
/apollo/trucksim/pose
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}
4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
以上是Apollo与Carsim/TruckSim合作进行联合仿真的详细内容。更多信息请关注PHP中文网其他相关文章!