


(映维网Nweon 2024年01月04日)头戴式设备可以包含用于追踪面部运动的面部追踪传感器。执行面部追踪的一种方法是使用面部追踪传感器阵列来测量电容值。当面部肌肉运动时,面部追踪传感器的电容会根据面部表面与相应传感器的接近程度而变化。
确定电容的一种可能方法是使用包含面部追踪传感器的感测电容的谐振LC电路。改变与感应电容的表面接近度可以导致谐振LC电路的谐振频率发生可测量的变化。然而,阵列的面部追踪传感器之间可能发生电容串扰,从而使得多个传感器同时执行电容测量变得复杂。
在名为“Determining charge on a facial-tracking sensor”的专利申请中,微软介绍的方法主要通过确定存储在感觉电容器的电极的电荷量来确定面部追踪传感器的感觉电容器的电容。
简单地说,面部追踪传感器包括配置成定位于靠近面部表面的感测电容器电极。所述感应电容器电极基于所述感应电容器电极与所述表面之间的距离形成电容。控制器对面部追踪传感器的感应电容电极施加参考电压。
然后,电荷传感电路通过确定由于施加参考电压而在感测电容器电极上累积的电荷量来确定感测电容器电极上的电容。
在一个实施例中,控制器同时沿着电荷传感电路和面部追踪传感器之间的电气连接将参考电压应用于shielding track。shielding track的参考电压有助于减少面部追踪传感器接收到的电容串扰。

图1显示了包括多个面部追踪传感器的示例头戴式设备100。具体地说,头戴式设备100包括形成在头戴式设备100的左透镜104L的左感电容电极阵列102L和形成在右透镜104R的右感电容电极阵列102R。
左感电容器电极阵列102L和右感电容器电极阵列102R中的每一个包括多个感觉电容器电极,每个感觉电容器电极配置为感测佩戴者面部的不同区域。每个感测电容器电极配置为定位于靠近人脸的表面,并基于感测电容器电极与人脸表面之间的距离形成电容。
感测电容器电极阵列102L、102R由至少部分光学透明的导电薄膜形成。所述薄膜可包含一种或多种导电材料,如氧化铟锡、石墨烯或其他合适材料。薄膜可以通过任何合适的工艺形成,例如化学气相沉积。在感测电容器电极之间形成的沟槽可用于放置导电走线。由于导电膜不是完全光学透明,所以与相对较厚的涂层相比,使用相对较薄的膜用于感测电容器电极可以提供更大的透明度。
头戴式设备100同时包括多个电荷传感电路,如图112所示。多个电荷传感电路112中的每个电荷传感电路连接到相应的面部追踪传感器。每个电荷传感电路112配置为通过确定由于施加参考电压而在相应的传感电容器电极上累积的电荷量来确定相应的传感电容器电极的电容。

图2示出包含多个感测电容器电极的感测电容器电极阵列的示例布局202。如图所示,感测电容器电极204a-g由沟槽区域208隔开,用粗黑线表示。沟槽区208是缺乏形成感测电容器电极204a-g的导电膜的感测电容器电极之间的区域。沟槽区域208可以包括导电走线,以将传感电容器电极204a-g连接到电荷传感电路和/或其他电路。
由于形成感测电容器电极阵列的导电膜不是完全透明,所以在特定示例中可以看到布局202。然而,当并入配置为头戴式设备时,在大多数正常使用期间,布局202可以定位于比人眼焦距更近的位置。所以布局202可以在普通设备使用期间对用户失焦,因此不妨碍用户或分散用户的注意力。
图3示出示例头戴式设备300。头戴式设备300包括一个或多个面部追踪传感器302,以及相应的一个或多个电荷传感电路304。每个面部追踪传感器302包括配置为定位于靠近面部表面的感觉电容器电极306,它可以基于感觉电容器电极306与面部表面之间的距离形成电容。
头戴式设备300同时包括控制器308,其配置为将参考电压施加到一个或多个面部追踪传感器302的感测电容器电极306。
如上所述,每个电荷传感电路304配置为通过确定由参考电压产生的,并在传感电容器电极306积累的电荷量来确定相应的面部追踪传感器302的传感电容器电极306的电容。例如,电容C可以用Q=C*V来确定,其中V是参考电压,Q是由参考电压产生的在感测电容器电极306积累的电荷量。
在一个实施例中,每个电荷传感电路304进一步配置为至少基于对由参考电压产生的相应面部追踪传感器302的传感电容器电极306积累的电荷量进行过采样而产生多个电容位值。过采样包括对传感器电容电极306的电荷进行重复采样,并对重复采样进行滤波。
在一个实施例总,可以同时确定在多个感测电容器电极306中的每一个积累的电荷。因此,控制器308可以配置为并发操作相应的电荷传感电路304中的一个或多个。这样的配置可能有助于实现比利用面部追踪传感器的时间复用操作的配置更快的操作。
头戴式设备300同时包括沿一个或多个电荷传感电路304与相应的一个或多个面部追踪传感器302之间的电气连接的shielding track 310。shielding track 310可以帮助减少来自靠近一个或多个面部追踪传感器302与相应的一个或多个电荷传感电路304之间的电连接的导体的电干扰,例如传感电容器电极306之间的电容串扰。
减少电容串扰有助于减少传感误差和/或降低噪点。例如,shielding track 310可以帮助在头戴式设备300的电接地和电气连接之间电抵消杂散电容。

图4描述了头戴式设备400的更详细框图。头戴式设备400是头戴式设备300的示例实现。与头戴式设备300类似,头戴式设备400包括多个面部追踪传感器402、相应的多个电荷传感电路404、shielding track 406和控制器408。
与面部追踪传感器302类似,多个面部追踪传感器402中的每个面部追踪传感器包括感测电容器电极410。在所描述的实施例中,每个电荷传感电路404配置为至少基于对积累的电荷量进行过采样而产生多个电容位值412。每个电荷传感电路404包括一个SD-ADC 414和一个连接到SD-ADC 414输出端的数字滤波器416。
作为示例,SD-ADC 414对电荷传感电路404的输入进行过采样,并输出位流415。位流至少基于对输入进行过采样而指示累积的电荷量。
在一个实施例中,过采样可包括50至256范围内的过采样比。在其它实施例中,过采样可包括任何其它合适的过采样比。输入过采样可能有助于提高SD-ADC 414的精度,允许模数转换的噪点整形,和/或降低SD-ADC 414的设计复杂性。作为示例,噪点整形可以将噪点塑造为更高的频率,并且因此可以促进噪点的滤波。
数字滤波器416将位流415从SD-ADC 414转换为多个电容位值412,并过滤来自多个电容位值412的高频噪声。这种噪点滤波有助于提高信噪比。在SD-ADC 414包括二阶SD-ADC的示例中,数字滤波器416包括二阶滤波器。在其他示例中,每个SD-ADC 414和每个数字滤波器416可以分别包含任何合适顺序的SD-ADC和数字滤波器。

图5描述了示例SD-ADC 500的框图。SD-ADC 500是SD-ADC 414的一个示例实现。SD-ADC 500接收模拟输入U 502,并通过增量电路504、Sigma电路506和量化器508输出数字输出V。
SD-ADC 500同时包括包括数字模拟转换器DAC 510和单位延迟电路512的反馈路径。Delta电路504比较输入U 502和反馈路径输出之间的差值。例如,增量电路504可以比较输入U 502和反馈路径输出之间的模拟电压差。
接下来,Sigma电路506被配置为输出节点y514,至少基于Delta电路504随时间的输出的平均值。随时间的平均值可以在连续时间或离散时间确定。Sigma电路506可以包括如下所述的积分器电路和/或任何其他合适的电路。
接着,量化器508对节点y514进行采样,并基于节点y514的采样值输出数字值,形成位流516。作为具体示例,量化器508可以包括一个比较器电路,比较器电路配置为当节点y514分别低于量化器参考电压或高于量化器参考电压时,在一个时钟周期上输出逻辑0或逻辑1。
图6示出连接到感测电容器电极602的示例Sigma电路600。例如,SD-ADC 414和SD-ADC 500可以使用Sigma电路600。Sigma电路600包括具有第一积分器电容器606和第二积分器电容器608的积分器604。西格玛电路600的操作通过第一控制点θ1、第二控制点θ2、第三控制点θ3和第四个控制点θ4来控制。在一些示例中,Sigma电路600之外的控制器(例如控制器408)可以控制第一、第二、第三和第四个控制点。
当第一控制点θ1导电时,第一参考电压610连接到感测电容器电极602。这样,将第一参考电压610施加到感测电容器电极602。然后,第一控制点θ1打开,第二控制点θ2导通,将参考电压产生的积累在感测电容器电极602的电荷传递给第一积分器电容器606。第一积分器电容器606和积分器604根据所积累的电荷输出电压。
在另一实施例中,当第一控制点θ1打开时,第二控制点θ2和第四控制点θ4导通,将在感应电容器电极602积累的电荷传递给第一积分器电容器606和第二积分器电容器608。
在这样的配置中,积分器604完全微分,并且累积的电荷在第一和第二积分器电容器606、608之间被分割。因此,输出电压在积分器604的输出节点之间分割,如612所示。全差分积分器可以帮助提高SD-ADC的精度,降低对杂散噪点和/或耦合的敏感性,和/或降低SD-ADC的设计复杂性。
接着,当第三控制点θ3导通时,连接第二参考电压614并将其施加到感测电容器电极602。在所描述的实施例中,施加第一参考电压610在第一周期中将在感测电容器电极602积累的电荷定向到积分器604的非反相输入,施加第二参考电压614在第二周期中将在感测电容器电极602积累的电荷定向到积分器604的反相输入。
同样,第三控制点θ3打开,第四控制点θ4导通,将在感应电容器电极602积累的电荷传递给第二积分器电容器608。然后,第二积分器电容器608和积分器604基于所积累的电荷输出电压。在其他实施例中,第一、第二、第三和第四控制点可以任何其他合适的方式进行控制。
在一个实施例中,设备的一个或多个面部追踪传感器可以在电上看到大于到面部上近处点的电容的偏置电容,这可能干扰对面部的较小电容的传感。可以通过使用具有与偏移电容相似或等效电容值的电容器来电抵消这种偏移电容。
然而,更大的电容器可能消耗更大的面积。因此,图7示出的头戴式设备700利用可连接到感测电容器电极704的相对较小的固定电容器702来电抵消偏置电容706。

在所描述的示例中,如上所述,第一控制点θ1导通,并将第一参考电压610施加于感测电容器电极704。然后,第一控制点θ1打开,位于固定电容器702连接上的第五控制点θ5拨动以电抵消感应电容器电极704上的偏置电容706。开关的数量可以基于固定电容器702的电容值和偏置电容706的值。
例如,当偏置电容706比固定电容702大10倍时,则第五控制点θ5可以切换10次以电抵消偏置电容706。与省略这种切换的实现相比,使用第五个控制点θ5的切换可以帮助减小头戴式设备700上的固定电容器702的尺寸。图7所示为单个感测电容器电极、固定电容器和Sigma电路,其他实施例可包括多个感测电容器电极以及相应的多个固定电容器和西格玛电路。

图8描述了确定感测电容器电极电容值的示例方法800的流程图。
在802,对面部追踪传感器的感应电容电极施加参考电压。
在804,沿着面部追踪传感器和电荷传感电路之间的电气连接将参考电压施加到shielding track。将参考电压施加到屏蔽轨道上可以帮助电抵消头戴式设备上多个面部追踪传感器的感测电容器电极之间的电容。另外,将所述参考电压施加到所述屏蔽轨迹可有助于使能够同时操作相应的多个电荷传感电路。
如上所述,头戴式设备可以在感测电容器电极看到偏移电容。在这样的实例中,806包括通过切换偏移补偿电容器的连接来放电偏移电容,从而消除感应电容器电极上的偏移电容。
在一个实施例中,偏移补偿电容器可包括可多次切换的较小的固定电容器。以这种方式,较小的固定电容可以电地抵消较大的偏置电容。在其它示例中,偏移补偿电容器可包括可编程电容器,可选择性地控制以调整电容值。
继续在808,基于由于施加参考电压而在面部追踪传感器的感测电容器电极积累的电荷量,确定面部追踪传感器的感测电容器电极的电容值。
在一个实施例中,确定所述感测电容器电极的电容值包括至少基于对所述面部追踪传感器的所述感测电容器电极积累的电荷量进行过采样来确定多个电容位值,如810所示。
作为示例,多个电容位值可以包括指示在感测电容器电极上积累的电荷量的二进制数。如前所述,SD-ADC可以将多个电容位值上的噪点塑造为更高的频率。因此,方法800在812包括从多个电容位值滤除高频噪点。滤波高频噪点有助于提高电容位值的信噪比。
相关专利:Microsoft Patent | Determining charge on a facial-tracking sensor
名为“Determining charge on a facial-tracking sensor”的微软专利申请最初在2022年6月提交,并在日前由美国专利商标局公布。
需要注意的是,一般来说,美国专利申请接收审查后,自申请日或优先权日起18个月自动公布或根据申请人要求在申请日起18个月内进行公开。注意,专利申请公开不代表专利获批。在专利申请后,美国专利商标局需要进行实际审查,时间可能在1年至3年不等。
另外,这只是一份专利申请,不代表一定通过,同时不确定是否会实际商用及实际的应用效果。
以上是微软专利为AR眼镜面部追踪提出改善的传感器电容值测量的详细内容。更多信息请关注PHP中文网其他相关文章!

 拥抱面部是否7B型号奥林匹克赛车击败克劳德3.7?Apr 23, 2025 am 11:49 AM
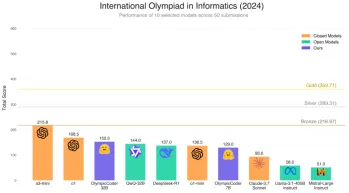
拥抱面部是否7B型号奥林匹克赛车击败克劳德3.7?Apr 23, 2025 am 11:49 AM拥抱Face的OlympicCoder-7B:强大的开源代码推理模型 开发以代码为中心的语言模型的竞赛正在加剧,拥抱面孔与强大的竞争者一起参加了比赛:OlympicCoder-7B,一种产品
 4个新的双子座功能您可以错过Apr 23, 2025 am 11:48 AM
4个新的双子座功能您可以错过Apr 23, 2025 am 11:48 AM你们当中有多少人希望AI可以做更多的事情,而不仅仅是回答问题?我知道我有,最近,我对它的变化感到惊讶。 AI聊天机器人不仅要聊天,还关心创建,研究
 Camunda为经纪人AI编排编写了新的分数Apr 23, 2025 am 11:46 AM
Camunda为经纪人AI编排编写了新的分数Apr 23, 2025 am 11:46 AM随着智能AI开始融入企业软件平台和应用程序的各个层面(我们必须强调的是,既有强大的核心工具,也有一些不太可靠的模拟工具),我们需要一套新的基础设施能力来管理这些智能体。 总部位于德国柏林的流程编排公司Camunda认为,它可以帮助智能AI发挥其应有的作用,并与新的数字工作场所中的准确业务目标和规则保持一致。该公司目前提供智能编排功能,旨在帮助组织建模、部署和管理AI智能体。 从实际的软件工程角度来看,这意味着什么? 确定性与非确定性流程的融合 该公司表示,关键在于允许用户(通常是数据科学家、软件
 策划的企业AI体验是否有价值?Apr 23, 2025 am 11:45 AM
策划的企业AI体验是否有价值?Apr 23, 2025 am 11:45 AM参加Google Cloud Next '25,我渴望看到Google如何区分其AI产品。 有关代理空间(此处讨论)和客户体验套件(此处讨论)的最新公告很有希望,强调了商业价值
 如何为抹布找到最佳的多语言嵌入模型?Apr 23, 2025 am 11:44 AM
如何为抹布找到最佳的多语言嵌入模型?Apr 23, 2025 am 11:44 AM为您的检索增强发电(RAG)系统选择最佳的多语言嵌入模型 在当今的相互联系的世界中,建立有效的多语言AI系统至关重要。 强大的多语言嵌入模型对于RE至关重要
 麝香:奥斯汀的机器人需要每10,000英里进行干预Apr 23, 2025 am 11:42 AM
麝香:奥斯汀的机器人需要每10,000英里进行干预Apr 23, 2025 am 11:42 AM特斯拉的Austin Robotaxi发射:仔细观察Musk的主张 埃隆·马斯克(Elon Musk)最近宣布,特斯拉即将在德克萨斯州奥斯汀推出的Robotaxi发射,最初出于安全原因部署了一支小型10-20辆汽车,并有快速扩张的计划。 h
 AI震惊的枢轴:从工作工具到数字治疗师和生活教练Apr 23, 2025 am 11:41 AM
AI震惊的枢轴:从工作工具到数字治疗师和生活教练Apr 23, 2025 am 11:41 AM人工智能的应用方式可能出乎意料。最初,我们很多人可能认为它主要用于代劳创意和技术任务,例如编写代码和创作内容。 然而,哈佛商业评论最近报道的一项调查表明情况并非如此。大多数用户寻求人工智能的并非是代劳工作,而是支持、组织,甚至是友谊! 报告称,人工智能应用案例的首位是治疗和陪伴。这表明其全天候可用性以及提供匿名、诚实建议和反馈的能力非常有价值。 另一方面,营销任务(例如撰写博客、创建社交媒体帖子或广告文案)在流行用途列表中的排名要低得多。 这是为什么呢?让我们看看研究结果及其对我们人类如何继续将



热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

DVWA
Damn Vulnerable Web App (DVWA) 是一个PHP/MySQL的Web应用程序,非常容易受到攻击。它的主要目标是成为安全专业人员在合法环境中测试自己的技能和工具的辅助工具,帮助Web开发人员更好地理解保护Web应用程序的过程,并帮助教师/学生在课堂环境中教授/学习Web应用程序安全。DVWA的目标是通过简单直接的界面练习一些最常见的Web漏洞,难度各不相同。请注意,该软件中

Atom编辑器mac版下载
最流行的的开源编辑器

禅工作室 13.0.1
功能强大的PHP集成开发环境

