



智能驾驶系统中的环境感知问题,需要具体代码示例
随着科技的飞速发展,智能驾驶技术成为当今汽车行业的热门话题。智能驾驶系统的核心之一就是对车辆周围环境的感知能力。而在智能驾驶系统中,环境感知的准确性和实时性对于确保驾驶安全至关重要。本文将探讨智能驾驶系统中环境感知的问题,并给出具体的代码示例。
一、环境感知的重要性
在实现自动驾驶的过程中,环境感知是智能驾驶系统中最为基础且关键的一环。通过环境感知,智能驾驶系统能够准确地感知到车辆周围的道路状态、障碍物、交通信号等信息,从而做出相应的驾驶决策。环境感知的准确性和实时性直接影响到驾驶系统的安全性和可靠性。
二、环境感知的挑战
在实际应用中,智能驾驶系统面临着多种环境感知的挑战。一方面,道路环境十分复杂多变,存在各种各样的道路标志、交通信号灯、行人、车辆等。另一方面,智能驾驶系统需要以实时的方式感知到环境信息,对车辆周围的障碍物和道路状态进行精准的检测和识别。因此,环境感知在智能驾驶系统中是一个十分具有挑战性的问题。
三、环境感知的解决方法
为了有效解决智能驾驶系统中的环境感知问题,我们需要采用一些先进的技术和方法。以下是一些常用的环境感知解决方法:
- 传感器融合:智能驾驶系统通常会使用多种传感器,如摄像头、雷达、激光雷达等,来感知车辆周围的环境。通过将多个传感器的数据进行融合,可以提高环境感知的准确性和鲁棒性。
- 深度学习:深度学习在环境感知中发挥着重要的作用。通过训练神经网络模型,可以实现对道路标志、行人、车辆等目标的准确识别和分类。
- 基于地图的定位和感知:将预先制作好的地图信息与传感器数据进行融合,可以提高环境感知的精确度。同时,地图信息还可以用于车辆的定位和路径规划。
下面是一个简单的代码示例,展示了如何使用深度学习技术实现图像目标识别的环境感知方法:
import tensorflow as tf
# 加载训练好的模型
model = tf.keras.models.load_model('object_detection_model.h5')
# 载入待识别的图像
image = tf.io.read_file('image.jpg')
image = tf.image.decode_jpeg(image, channels=3)
image = tf.image.resize(image, [224, 224])
image = image / 255.0
# 对图像进行目标识别
predictions = model.predict(tf.expand_dims(image, axis=0))
class_index = tf.argmax(predictions, axis=1)[0]
# 根据类别索引获得类别名称
class_names = ['car', 'pedestrian', 'traffic light']
class_name = class_names[class_index]
# 输出结果
print('Detected object: ', class_name)这段代码使用了一个预训练的深度学习模型,能够将输入的图像识别为车辆、行人或者交通信号灯中的一种。通过在实际应用中收集大量的数据进行训练,可以让模型逐渐学习到更多环境中的目标。
总结:
智能驾驶系统中的环境感知问题对于确保驾驶安全至关重要,而解决环境感知问题需要应用多种先进的技术和方法。本文简单介绍了环境感知的重要性、挑战以及解决方法,并给出了一个使用深度学习技术实现图像目标识别的示例代码。随着智能驾驶技术的不断发展,我们可以期待环境感知技术的进一步突破和创新,为实现更安全、高效的自动驾驶提供有力的支持。
以上是智能驾驶系统中的环境感知问题的详细内容。更多信息请关注PHP中文网其他相关文章!

 拥抱面部是否7B型号奥林匹克赛车击败克劳德3.7?Apr 23, 2025 am 11:49 AM
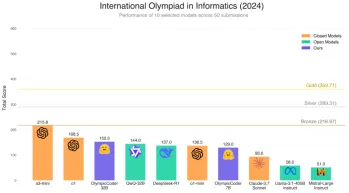
拥抱面部是否7B型号奥林匹克赛车击败克劳德3.7?Apr 23, 2025 am 11:49 AM拥抱Face的OlympicCoder-7B:强大的开源代码推理模型 开发以代码为中心的语言模型的竞赛正在加剧,拥抱面孔与强大的竞争者一起参加了比赛:OlympicCoder-7B,一种产品
 4个新的双子座功能您可以错过Apr 23, 2025 am 11:48 AM
4个新的双子座功能您可以错过Apr 23, 2025 am 11:48 AM你们当中有多少人希望AI可以做更多的事情,而不仅仅是回答问题?我知道我有,最近,我对它的变化感到惊讶。 AI聊天机器人不仅要聊天,还关心创建,研究
 Camunda为经纪人AI编排编写了新的分数Apr 23, 2025 am 11:46 AM
Camunda为经纪人AI编排编写了新的分数Apr 23, 2025 am 11:46 AM随着智能AI开始融入企业软件平台和应用程序的各个层面(我们必须强调的是,既有强大的核心工具,也有一些不太可靠的模拟工具),我们需要一套新的基础设施能力来管理这些智能体。 总部位于德国柏林的流程编排公司Camunda认为,它可以帮助智能AI发挥其应有的作用,并与新的数字工作场所中的准确业务目标和规则保持一致。该公司目前提供智能编排功能,旨在帮助组织建模、部署和管理AI智能体。 从实际的软件工程角度来看,这意味着什么? 确定性与非确定性流程的融合 该公司表示,关键在于允许用户(通常是数据科学家、软件
 策划的企业AI体验是否有价值?Apr 23, 2025 am 11:45 AM
策划的企业AI体验是否有价值?Apr 23, 2025 am 11:45 AM参加Google Cloud Next '25,我渴望看到Google如何区分其AI产品。 有关代理空间(此处讨论)和客户体验套件(此处讨论)的最新公告很有希望,强调了商业价值
 如何为抹布找到最佳的多语言嵌入模型?Apr 23, 2025 am 11:44 AM
如何为抹布找到最佳的多语言嵌入模型?Apr 23, 2025 am 11:44 AM为您的检索增强发电(RAG)系统选择最佳的多语言嵌入模型 在当今的相互联系的世界中,建立有效的多语言AI系统至关重要。 强大的多语言嵌入模型对于RE至关重要
 麝香:奥斯汀的机器人需要每10,000英里进行干预Apr 23, 2025 am 11:42 AM
麝香:奥斯汀的机器人需要每10,000英里进行干预Apr 23, 2025 am 11:42 AM特斯拉的Austin Robotaxi发射:仔细观察Musk的主张 埃隆·马斯克(Elon Musk)最近宣布,特斯拉即将在德克萨斯州奥斯汀推出的Robotaxi发射,最初出于安全原因部署了一支小型10-20辆汽车,并有快速扩张的计划。 h
 AI震惊的枢轴:从工作工具到数字治疗师和生活教练Apr 23, 2025 am 11:41 AM
AI震惊的枢轴:从工作工具到数字治疗师和生活教练Apr 23, 2025 am 11:41 AM人工智能的应用方式可能出乎意料。最初,我们很多人可能认为它主要用于代劳创意和技术任务,例如编写代码和创作内容。 然而,哈佛商业评论最近报道的一项调查表明情况并非如此。大多数用户寻求人工智能的并非是代劳工作,而是支持、组织,甚至是友谊! 报告称,人工智能应用案例的首位是治疗和陪伴。这表明其全天候可用性以及提供匿名、诚实建议和反馈的能力非常有价值。 另一方面,营销任务(例如撰写博客、创建社交媒体帖子或广告文案)在流行用途列表中的排名要低得多。 这是为什么呢?让我们看看研究结果及其对我们人类如何继续将



热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

SublimeText3汉化版
中文版,非常好用

安全考试浏览器
Safe Exam Browser是一个安全的浏览器环境,用于安全地进行在线考试。该软件将任何计算机变成一个安全的工作站。它控制对任何实用工具的访问,并防止学生使用未经授权的资源。

记事本++7.3.1
好用且免费的代码编辑器

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

SublimeText3 Linux新版
SublimeText3 Linux最新版

