



半自主医疗机器人肺部的3个阶段。图片来源:KUNTZ等人/北卡罗来纳大学
有些肿瘤非常小,隐藏在肺组织深处,医生很难触及它们。为应对这一挑战,美国北卡罗来纳大学教堂山分校和范德比尔特大学研究人员一直在研究一种能穿越肺组织的极其柔韧但坚固的机器人。他们在《科学·机器人》杂志上最新发表的一篇论文中,展现了新机器人可自主地从“A点”出发到达“B点”,同时避开活体实验室模型中的重要结构,例如微小气道和血管。
研究人员指出,这项技术能够实现机器人支气管镜无法达到的目标。它可以提供额外的几厘米甚至几毫米的距离,对于追踪肺部的小目标非常有帮助
该机器人由几个独立的组件组成。机械控制组件的原理是利用一种针,针向前和向后提供受控推力,并且针设计允许沿着弯曲路径转向。该针由镍钛合金制成,经过激光蚀刻以增加其灵活性,使其能轻松地穿过组织。
当它向前移动时,针上的蚀刻使其能够轻松绕过障碍物。导管等其他附件可与针一起使用来执行肺活检等程序。
为了穿过组织,针需要知道它要去哪里。研究团队利用受试者胸腔的CT扫描和人工智能创建了肺部的三维模型,包括气道、血管和选定的目标。使用这个3D模型,一旦针向靶标出发,人工智能驱动软件就会指示它自动从“A点”移动到“B点”,同时避开重要的结构。
研究人员称,它类似于自动驾驶汽车,但它可通过肺组织进行导航,在到达目的地时避开重要血管等障碍物。
需要进行改写的内容是:总编辑的选择和修改
当谈论在人体内工作的机器人时,人们总希望它小巧、灵活、智能、柔韧并且坚固,希望这种机器人能辅助人类的双手和双眼,去往人类双手难以抵达之处,看清人类双眼无法分辨的病灶。这次,诞生了一种全新的机器人。它不仅能够到达设定的目的地,还能灵活避开一些微小但重要的结构。要知道,人体器官如此复杂,在通往目标的道路上存在着许多需要绕过的细小障碍。研究人员必须在结构、材料和机器人运动模式上下功夫,使其能够自如地前进和后退,顺利地进行疾病治疗和救治工作
(来源:科技日报)
以上是机器人实现活体肺组织内的'半自主导航”,同时避开微小气道和血管等关键结构的详细内容。更多信息请关注PHP中文网其他相关文章!

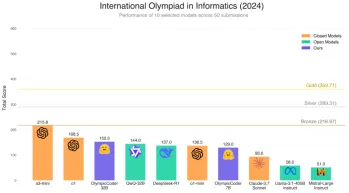 拥抱面部是否7B型号奥林匹克赛车击败克劳德3.7?Apr 23, 2025 am 11:49 AM
拥抱面部是否7B型号奥林匹克赛车击败克劳德3.7?Apr 23, 2025 am 11:49 AM拥抱Face的OlympicCoder-7B:强大的开源代码推理模型 开发以代码为中心的语言模型的竞赛正在加剧,拥抱面孔与强大的竞争者一起参加了比赛:OlympicCoder-7B,一种产品
 4个新的双子座功能您可以错过Apr 23, 2025 am 11:48 AM
4个新的双子座功能您可以错过Apr 23, 2025 am 11:48 AM你们当中有多少人希望AI可以做更多的事情,而不仅仅是回答问题?我知道我有,最近,我对它的变化感到惊讶。 AI聊天机器人不仅要聊天,还关心创建,研究
 Camunda为经纪人AI编排编写了新的分数Apr 23, 2025 am 11:46 AM
Camunda为经纪人AI编排编写了新的分数Apr 23, 2025 am 11:46 AM随着智能AI开始融入企业软件平台和应用程序的各个层面(我们必须强调的是,既有强大的核心工具,也有一些不太可靠的模拟工具),我们需要一套新的基础设施能力来管理这些智能体。 总部位于德国柏林的流程编排公司Camunda认为,它可以帮助智能AI发挥其应有的作用,并与新的数字工作场所中的准确业务目标和规则保持一致。该公司目前提供智能编排功能,旨在帮助组织建模、部署和管理AI智能体。 从实际的软件工程角度来看,这意味着什么? 确定性与非确定性流程的融合 该公司表示,关键在于允许用户(通常是数据科学家、软件
 策划的企业AI体验是否有价值?Apr 23, 2025 am 11:45 AM
策划的企业AI体验是否有价值?Apr 23, 2025 am 11:45 AM参加Google Cloud Next '25,我渴望看到Google如何区分其AI产品。 有关代理空间(此处讨论)和客户体验套件(此处讨论)的最新公告很有希望,强调了商业价值
 如何为抹布找到最佳的多语言嵌入模型?Apr 23, 2025 am 11:44 AM
如何为抹布找到最佳的多语言嵌入模型?Apr 23, 2025 am 11:44 AM为您的检索增强发电(RAG)系统选择最佳的多语言嵌入模型 在当今的相互联系的世界中,建立有效的多语言AI系统至关重要。 强大的多语言嵌入模型对于RE至关重要
 麝香:奥斯汀的机器人需要每10,000英里进行干预Apr 23, 2025 am 11:42 AM
麝香:奥斯汀的机器人需要每10,000英里进行干预Apr 23, 2025 am 11:42 AM特斯拉的Austin Robotaxi发射:仔细观察Musk的主张 埃隆·马斯克(Elon Musk)最近宣布,特斯拉即将在德克萨斯州奥斯汀推出的Robotaxi发射,最初出于安全原因部署了一支小型10-20辆汽车,并有快速扩张的计划。 h
 AI震惊的枢轴:从工作工具到数字治疗师和生活教练Apr 23, 2025 am 11:41 AM
AI震惊的枢轴:从工作工具到数字治疗师和生活教练Apr 23, 2025 am 11:41 AM人工智能的应用方式可能出乎意料。最初,我们很多人可能认为它主要用于代劳创意和技术任务,例如编写代码和创作内容。 然而,哈佛商业评论最近报道的一项调查表明情况并非如此。大多数用户寻求人工智能的并非是代劳工作,而是支持、组织,甚至是友谊! 报告称,人工智能应用案例的首位是治疗和陪伴。这表明其全天候可用性以及提供匿名、诚实建议和反馈的能力非常有价值。 另一方面,营销任务(例如撰写博客、创建社交媒体帖子或广告文案)在流行用途列表中的排名要低得多。 这是为什么呢?让我们看看研究结果及其对我们人类如何继续将



热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

ZendStudio 13.5.1 Mac
功能强大的PHP集成开发环境

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

DVWA
Damn Vulnerable Web App (DVWA) 是一个PHP/MySQL的Web应用程序,非常容易受到攻击。它的主要目标是成为安全专业人员在合法环境中测试自己的技能和工具的辅助工具,帮助Web开发人员更好地理解保护Web应用程序的过程,并帮助教师/学生在课堂环境中教授/学习Web应用程序安全。DVWA的目标是通过简单直接的界面练习一些最常见的Web漏洞,难度各不相同。请注意,该软件中

VSCode Windows 64位 下载
微软推出的免费、功能强大的一款IDE编辑器

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)

