



本文将介绍一种通过BEV Sketch布局来精确生成多视角街景图片的方法

在自动驾驶领域,图像合成被广泛应用于提升下游感知任务的性能
在计算机视觉领域,提升感知模型性能的一个长期存在的研究难题是通过合成图像来实现。在以视觉为中心的自动驾驶系统中,使用多视角摄像头,这个问题变得更加突出,因为有些长尾场景是永远无法收集到的
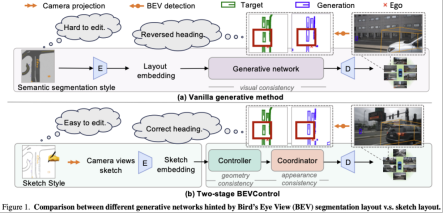
根据图1(a)所示,现有的生成方法将语义分割风格的BEV结构输入生成网络,并输出合理的多视角图像。在仅根据场景级指标进行评估时,现有方法似乎能合成照片般逼真的街景图像。然而,一旦放大,我们发现它无法生成准确的对象级别的细节。图中,我们展示了目前最先进生成算法的一个常见错误,即生成的车辆与目标3D边界框相比方向完全相反。此外,编辑语义分割样式的BEV结构是一项艰巨的任务,需要大量人力
因此,我们提出了一种名为BEVControl的两阶段方法,用于提供更精细的背景和前景几何控制,如图1(b)所示。BEVControl支持草图风格的BEV结构输入,可以实现快速简便的编辑。此外,我们的BEVControl将视觉一致性分解为两个子目标:通过控制器(Controller)实现街道视图和鸟瞰视图之间的几何一致性;通过协调器(Coordinator)实现街道视图之间的外观一致性

论文链接:https://www.php.cn/link/1531beb762df4029513ebf9295e0d34f
方法框架

- BEVControl 是一个 UNet 结构的生成网络,由一系列模块组成。每个模块有两个元素,即控制器(Controller )和协调器(Coordinator )。
- 输入:便于编辑的 BEV 草图、多视图噪声图像和文本提示;
- 输出:生成的多视图图像。
方法细节

- BEV草图到相机条件的相机投影过程。输入为BEV草图。输出为多视角的前景条件和背景条件。

- 控制器: 以自注意力的方式接收相机视图草图的前景和背景信息,并输出与 BEV草图具有几何一致性的街景特征。
- 协调器:利用一种新颖的跨视图、跨元素的注意力机制,实现跨视图的上下文交互,输出具有外观一致性的街景特征。
提出的测评指标
- 最近的街景图像生成工作仅根据场景级指标(如 FID、road mIoU 等)来评估生成质量。
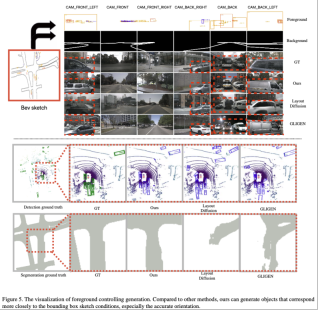
- 我们发现仅使用这些指标无法评估生成网络的真正生成能力,如下图所示。报告的定性和定量结果同时表明,两组生成的街景图像虽然具有相似的 FID 分数,但对前景和背景的细粒度控制能力却大相径庭。
- 因此,我们提出一套用于精细衡量生成网络控制能力的评估指标。

定量结果
- BEVControl与最先进的方法在提出的测评指标上的对比。

- 应用BEVControl做数据增强,在目标检测任务上的提升。


定性结果
- BEVControl与最先进的方法在NuScenes验证集上的对比。

Demo效果


需要重写的内容是:参考文献
需要重写的内容是:[1] Swerdlow A, Xu R, Zhou B. 从鸟瞰布局生成街景图像[J]. arXiv预印本 arXiv:2301.04634, 2023.
以上是背景与前景控制更加精细,编辑更加快捷:BEVControl的两阶段方法的详细内容。更多信息请关注PHP中文网其他相关文章!

 如何使用Monsterapi微调大语言模型Apr 19, 2025 am 10:49 AM
如何使用Monsterapi微调大语言模型Apr 19, 2025 am 10:49 AM利用微调LLM的功能与Monsterapi:综合指南 想象一个虚拟助手完美理解并预测您的需求。 由于大型语言模型(LLMS)的进步,这已成为现实。 但是,
 5统计测试每个数据科学家都应该知道-Analytics VidhyaApr 19, 2025 am 10:27 AM
5统计测试每个数据科学家都应该知道-Analytics VidhyaApr 19, 2025 am 10:27 AM数据科学的基本统计测试:综合指南 从数据中解锁有价值的见解至关重要。 掌握统计测试对于实现这一目标至关重要。这些测试使数据科学家能够严格瓦尔
 如何使用Florence -2 -Analytics Vidhya执行计算机视觉任务Apr 19, 2025 am 10:21 AM
如何使用Florence -2 -Analytics Vidhya执行计算机视觉任务Apr 19, 2025 am 10:21 AM介绍 原始变压器的引入为当前的大语言模型铺平了道路。同样,在引入变压器模型之后,引入了视觉变压器(VIT)。喜欢
 使用Langchain Text Splitters -Analytics Vidhya拆分数据的7种方法Apr 19, 2025 am 10:11 AM
使用Langchain Text Splitters -Analytics Vidhya拆分数据的7种方法Apr 19, 2025 am 10:11 AMLangchain文本拆分器:优化LLM输入以提高效率和准确性 我们上一篇文章介绍了Langchain的文档加载程序。 但是,LLM具有上下文窗口大小的限制(以代币测量)。 超过此限制会截断数据,comp
 免费生成的AI课程:开创创新的未来Apr 19, 2025 am 10:01 AM
免费生成的AI课程:开创创新的未来Apr 19, 2025 am 10:01 AM生成的AI:革命性的创造力和创新 生成的AI通过按下按钮来创建文本,图像,音乐和虚拟世界来改变行业。 它的影响跨越视频编辑,音乐制作,艺术,娱乐,HEA
 使用通用句子编码器和Wikiqa创建QA模型Apr 19, 2025 am 10:00 AM
使用通用句子编码器和Wikiqa创建QA模型Apr 19, 2025 am 10:00 AM利用嵌入模型的力量来回答高级问题 在当今信息丰富的世界中,立即获得精确答案的能力至关重要。 本文展示了使用强大的提问(QA)模型
 前十名必须阅读机器学习研究论文Apr 19, 2025 am 09:53 AM
前十名必须阅读机器学习研究论文Apr 19, 2025 am 09:53 AM本文探讨了十个彻底改变人工智能(AI)和机器学习(ML)的开创性出版物。 我们将研究神经网络和算法的最新突破,并解释驱动现代AI的核心概念。 Th
 替换SEO机构的11个AI工具 - 分析VidhyaApr 19, 2025 am 09:49 AM
替换SEO机构的11个AI工具 - 分析VidhyaApr 19, 2025 am 09:49 AMAI在SEO中的崛起:超过SEO代理商的前11个工具 AI的快速发展已深刻地重塑了SEO景观。 旨在提高顶级搜索引擎排名的企业正在利用AI优化其在线策略的能力。 来自AU


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

Dreamweaver Mac版
视觉化网页开发工具

记事本++7.3.1
好用且免费的代码编辑器

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

安全考试浏览器
Safe Exam Browser是一个安全的浏览器环境,用于安全地进行在线考试。该软件将任何计算机变成一个安全的工作站。它控制对任何实用工具的访问,并防止学生使用未经授权的资源。

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

