


根據IT之家12月23日消息,雖然現有的雙足機器人可以執行穿越不平坦地形等任務,但通常機械結構非常複雜,因此它們的體積較大
卡內基美隆大學科研團隊近日研發了Mugatu 機器人,採用新的行走機制,目前將高度壓縮到18.5 厘米(7.3 英寸)上,未來希望進一步簡化壓縮,降低至4 公分(1.6 吋)以內。
Mugatu 的設計靈感源自於 20 世紀 30 年代流行的 Wilson Walkie,這是一個無動力的木製人偶。當人偶被放置在坡道的頂部時,利用重力的作用來回拖動腿部,使其走到底部

Mugatu 透過臀部馬達來模擬雙足運動。機器人初始時保持站立不動,雙腿並排。接著,電機會驅動左腿擺動,使機器人的重心轉移到左腿上,從而導致機器人向前傾斜並將重心放在左腳上

摩加圖以左腳為支撐,透過馬達控制右腿的移動來實現行走,然後循環重複這個動作。 IT之家附上了演示視頻,如下所示:
廣告聲明:本文中包含對外跳轉連結(包括但不限於超連結、二維碼、口令等形式),旨在提供更多信息,節省甄選時間,僅供參考。請注意,IT之家所有文章均帶有此聲明
以上是Mugatu雙足機器人以輕量化方式實現行走,身高僅18.5厘米的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 AI遊戲開發通過Upheaval的Dreamer Portal進入其代理時代May 02, 2025 am 11:17 AM
AI遊戲開發通過Upheaval的Dreamer Portal進入其代理時代May 02, 2025 am 11:17 AM動盪遊戲:與AI代理商的遊戲開發徹底改變 Roupheaval是一家遊戲開發工作室,由暴風雪和黑曜石等行業巨頭的退伍軍人組成,有望用其創新的AI驅動的Platfor革新遊戲創作
 Uber想成為您的Robotaxi商店,提供商會讓他們嗎?May 02, 2025 am 11:16 AM
Uber想成為您的Robotaxi商店,提供商會讓他們嗎?May 02, 2025 am 11:16 AMUber的Robotaxi策略:自動駕駛汽車的騎車生態系統 在最近的Curbivore會議上,Uber的Richard Willder推出了他們成為Robotaxi提供商的乘車平台的策略。 利用他們在
 AI代理玩電子遊戲將改變未來的機器人May 02, 2025 am 11:15 AM
AI代理玩電子遊戲將改變未來的機器人May 02, 2025 am 11:15 AM事實證明,視頻遊戲是最先進的AI研究的寶貴測試理由,尤其是在自主代理商和現實世界機器人的開發中,甚至有可能促進人工通用情報(AGI)的追求。 一個
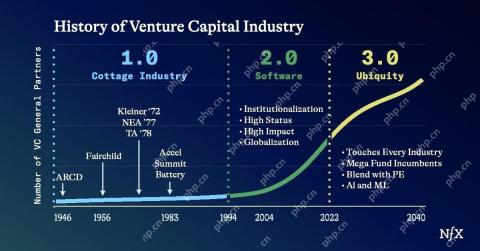 創業公司工業綜合體VC 3.0和James Currier的宣言May 02, 2025 am 11:14 AM
創業公司工業綜合體VC 3.0和James Currier的宣言May 02, 2025 am 11:14 AM不斷發展的風險投資格局的影響在媒體,財務報告和日常對話中顯而易見。 但是,對投資者,初創企業和資金的具體後果經常被忽略。 風險資本3.0:範式
 Adobe在Adobe Max London 2025更新創意云和螢火蟲May 02, 2025 am 11:13 AM
Adobe在Adobe Max London 2025更新創意云和螢火蟲May 02, 2025 am 11:13 AMAdobe Max London 2025對Creative Cloud和Firefly進行了重大更新,反映了向可訪問性和生成AI的戰略轉變。 該分析結合了事件前簡報中的見解,並融合了Adobe Leadership。 (注意:Adob
 Llamacon宣布的所有元數據May 02, 2025 am 11:12 AM
Llamacon宣布的所有元數據May 02, 2025 am 11:12 AMMeta的Llamacon公告展示了一項綜合的AI策略,旨在直接與OpenAI等封閉的AI系統競爭,同時為其開源模型創建了新的收入流。 這個多方面的方法目標bo
 關於AI僅僅是普通技術的主張的釀造爭議May 02, 2025 am 11:10 AM
關於AI僅僅是普通技術的主張的釀造爭議May 02, 2025 am 11:10 AM人工智能領域對這一論斷存在嚴重分歧。一些人堅稱,是時候揭露“皇帝的新衣”了,而另一些人則強烈反對人工智能僅僅是普通技術的觀點。 讓我們來探討一下。 對這一創新性人工智能突破的分析,是我持續撰寫的福布斯專欄文章的一部分,該專欄涵蓋人工智能領域的最新進展,包括識別和解釋各種有影響力的人工智能複雜性(請點擊此處查看鏈接)。 人工智能作為普通技術 首先,需要一些基本知識來為這場重要的討論奠定基礎。 目前有大量的研究致力於進一步發展人工智能。總目標是實現人工通用智能(AGI)甚至可能實現人工超級智能(AS
 模型公民,為什麼AI值是下一個業務碼May 02, 2025 am 11:09 AM
模型公民,為什麼AI值是下一個業務碼May 02, 2025 am 11:09 AM公司AI模型的有效性現在是一個關鍵的性能指標。自AI BOOM以來,從編寫生日邀請到編寫軟件代碼的所有事物都將生成AI使用。 這導致了語言mod的擴散


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

mPDF
mPDF是一個PHP庫,可以從UTF-8編碼的HTML產生PDF檔案。原作者Ian Back編寫mPDF以從他的網站上「即時」輸出PDF文件,並處理不同的語言。與原始腳本如HTML2FPDF相比,它的速度較慢,並且在使用Unicode字體時產生的檔案較大,但支援CSS樣式等,並進行了大量增強。支援幾乎所有語言,包括RTL(阿拉伯語和希伯來語)和CJK(中日韓)。支援嵌套的區塊級元素(如P、DIV),

Safe Exam Browser
Safe Exam Browser是一個安全的瀏覽器環境,安全地進行線上考試。該軟體將任何電腦變成一個安全的工作站。它控制對任何實用工具的訪問,並防止學生使用未經授權的資源。

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

SAP NetWeaver Server Adapter for Eclipse
將Eclipse與SAP NetWeaver應用伺服器整合。

VSCode Windows 64位元 下載
微軟推出的免費、功能強大的一款IDE編輯器

