
LightSim:NeurIPS 2023推出的自動駕駛光照模擬平台,實現真實、可控且可拓展的模擬體驗

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-12-15 16:22:011488瀏覽
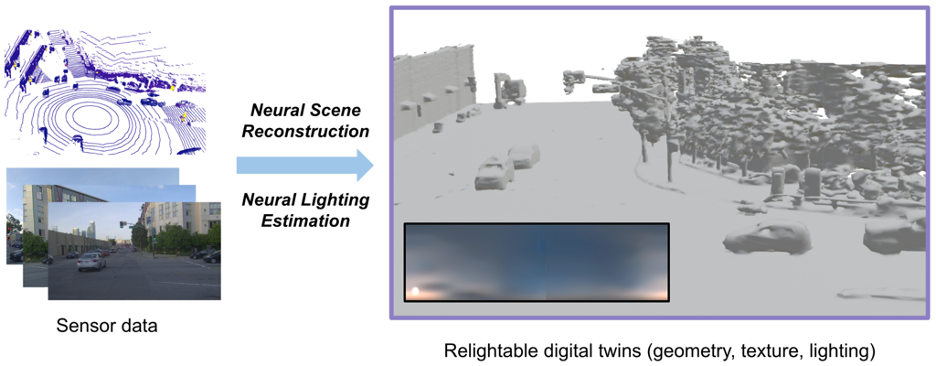
最近,來自 Waabi AI、多倫多大學、滑鐵盧大學和麻省理工的研究者們在 NeurIPS 2023 上提出了一種全新的自動駕駛光照模擬平台 LightSim。研究者提出了從真實資料中產生配對的光照訓練資料的方法,解決了資料缺失和模型遷移損失的問題。 LightSim 利用神經輻射場(NeRF)和基於物理的深度網絡渲染車輛駕駛視頻,首次在大規模真實數據上實現了動態場景的光照仿真。 
計畫網站:https://waabi.ai/lightsim -
#論文連結:https://openreview.net/pdf?id=mcx8IGneYw
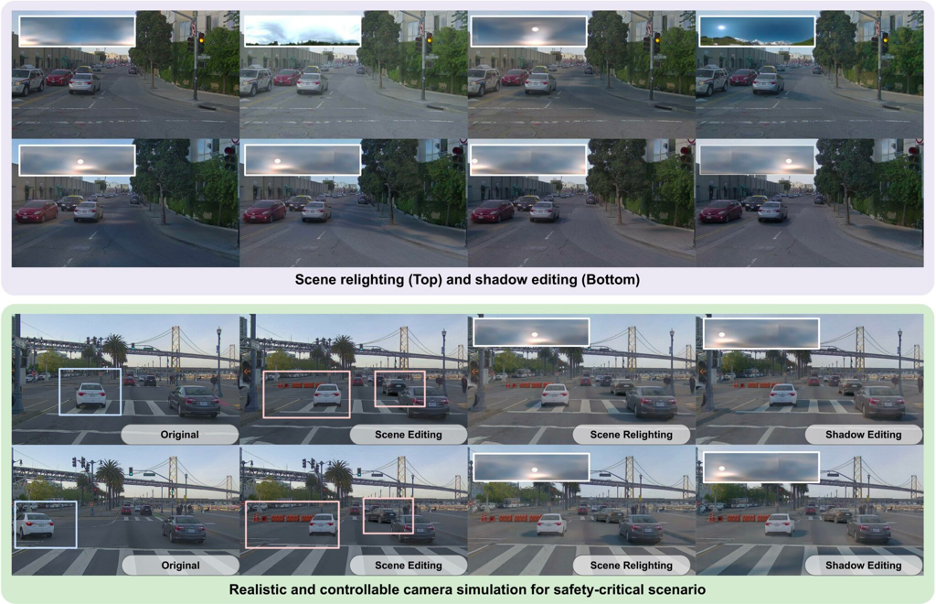
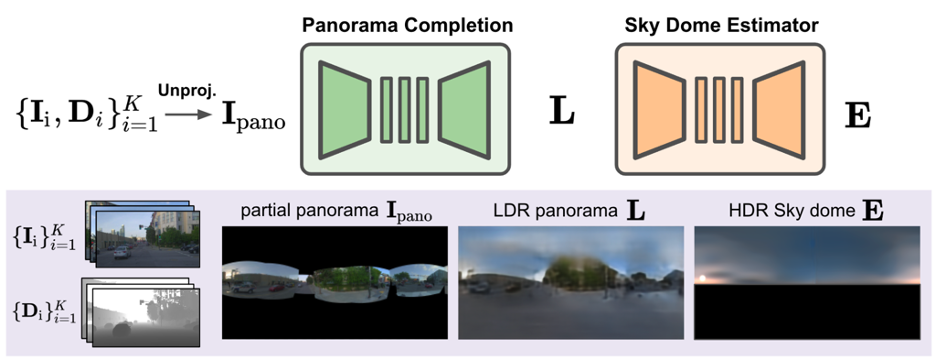
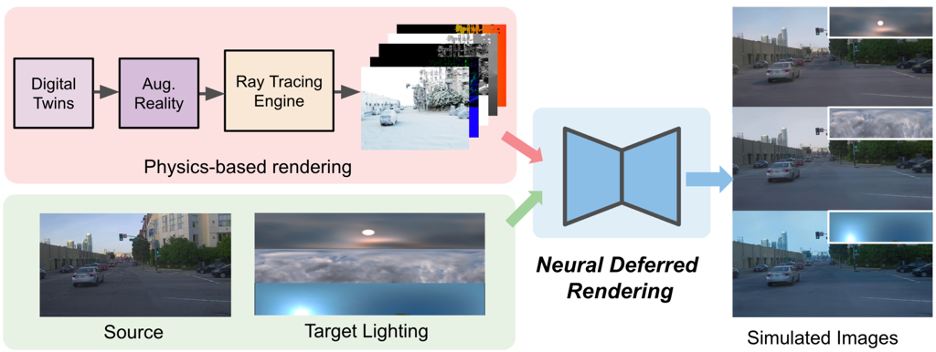
 LightSim 可以批量地進行場景重新照明,從估計的和真實的 HDR 環境圖中生成同一場景的新的時間一致的和可 3D 感知的照明變化。
LightSim 可以批量地進行場景重新照明,從估計的和真實的 HDR 環境圖中生成同一場景的新的時間一致的和可 3D 感知的照明變化。 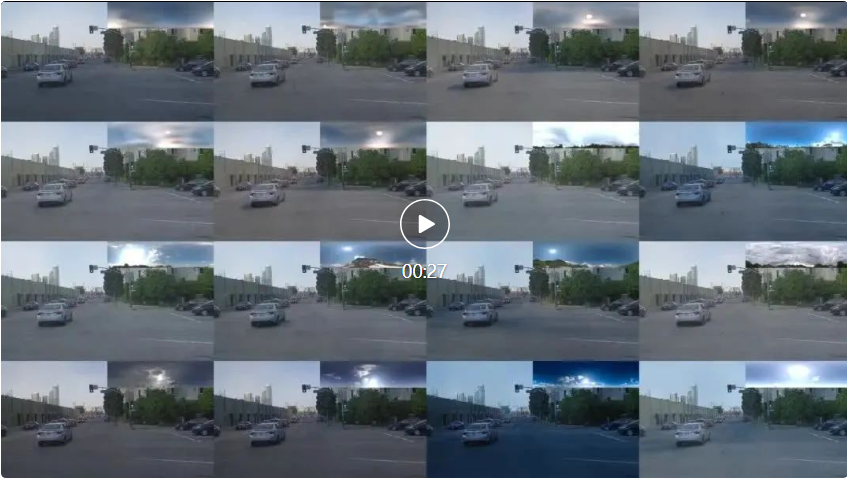
 LightSim 也可以批次地進行陰影編輯。
LightSim 也可以批次地進行陰影編輯。 


 以下影片中展示了另一個實例,插入了新的道路障礙後,又增加了一組新的車輛。使用 LightSim 搭建的模擬光照,讓新加入的車輛能夠無縫地融入場景中。
以下影片中展示了另一個實例,插入了新的道路障礙後,又增加了一組新的車輛。使用 LightSim 搭建的模擬光照,讓新加入的車輛能夠無縫地融入場景中。 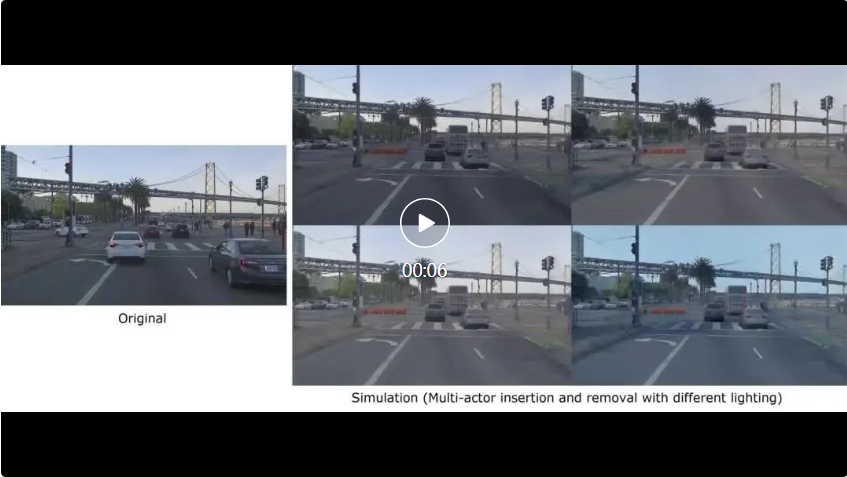
以上是LightSim:NeurIPS 2023推出的自動駕駛光照模擬平台,實現真實、可控且可拓展的模擬體驗的詳細內容。更多資訊請關注PHP中文網其他相關文章!
陳述:
本文轉載於:jiqizhixin.com。如有侵權,請聯絡admin@php.cn刪除