




在機器人領域,要實現通用機器人策略需要大量數據,而在真實世界收集這些數據又耗時費力。儘管模擬為產生場景層級和實例層級的不同體量的資料提供了一種經濟的解決方案,但由於需要大量的人力(尤其是對複雜任務),在模擬環境中增加任務多樣性仍面臨挑戰。這就導致典型的人工模擬基準通常只能包含數十到數百個任務。
如何解決呢?近年來,大語言模型在自然語言處理及各類任務的程式碼產生方面不斷取得重大進展。同樣,LLM 已經應用於機器人的多個方面,包括使用者介面、任務和運動規劃、機器人日誌總結、成本和獎勵設計,揭示了在物理基礎和程式碼生成任務上的強大能力。
在近日的一項研究中,來自MIT CSAIL、上海交通大學等機構的研究者進一步探究LLM 是否可以用來創建多樣化的模擬任務,並進一步挖掘它們的能力。
具體來講,研究者提出了一個基於 LLM 的框架 GenSim,它為設計和驗證任務資產安排、任務進展提供了一種自動化機制。更重要的是,生成的任務表現出了極大的多樣性,促進了機器人策略的任務級泛化。此外從概念上講,利用 GenSim,LLM 的推理和編碼能力透過中間合成的模擬資料被提煉成了語言 - 視覺 - 行動策略。

論文網址:https://arxiv.org/pdf/2310.01361.pdf
#GenSim 框架由以下三個部分組成:
- #首先是透過自然語言指令提出新任務以及對應程式碼實作的提示機制;
- 其次是快取先前產生的高品質指令程式碼以用於驗證和語言模型微調的任務庫,並作為綜合任務資料集返回;
- 最後是利用產生的資料來增強任務層級泛化能力的語言調整多任務策略訓練流程。
同時該框架透過兩種不同的模式運作。其中在目標導向設定中,使用者有特定的任務或希望設計一個任務課程。這時 GenSim 採取自上而下的方法,以預期任務作為輸入,迭代地產生相關任務以實現預期目標。而在探索性環境中,如果缺乏目標任務的先驗知識,則 GenSim 逐漸探索現有任務以外的內容,並建立與任務無關的基礎策略。
在下圖 1 中,研究者初始化了包含 10 個人工策劃任務的任務庫,使用 GenSim 對它進行擴展並產生 100 多個任務。

研究者也提出了幾個客製化的指標來漸進地衡量生成模擬任務的質量,並在目標導向和探索性設定中評估了幾種LLM。其中對於 GPT-4 產生的任務庫,他們對 GPT-3.5 和 Code-Llama 等 LLM 進行有監督微調,進一步提升了 LLM 的任務產生效能。同時透過策略訓練定量地衡量任務的可實現性,並提供不同屬性的任務統計資料和不同模型之間的程式碼比較。
不僅如此,研究者還訓練了多任務機器人策略,與僅在人工策劃任務上訓練的模型相比,這些策略在所有生成任務上都能很好地泛化,並提高了零樣本泛化性能。其中與 GPT-4 生成任務的聯合訓練可以將泛化效能提升 50%,並在模擬中將約 40% 的零樣本任務遷移到新任務中。
最後,研究者也考慮了模擬到真實的遷移,顯示在不同模擬任務上的預訓練可以將真實世界的泛化能力提升 25%。
總之,在不同LLM 產生的任務上訓練的策略實現了對新任務的更好任務級泛化能力,彰顯了透過LLM 擴展模擬任務來訓練基礎策略的潛力。
Tenstorrent AI 產品管理總監Shubham Saboo 給予了這項研究很高的評價,他表示,這是GPT-4 結合機器人的突破性研究,透過GPT-4 等LLM 來產生autopilot 上的一系列模擬機器人任務,使機器人的零樣本學習和真實世界適應成為了現實。

方法介紹
如下圖2 所示,GenSim 框架透過程式合成生成模擬環境、任務和演示。 GenSim pipeline 從任務建立器開始,prompt 鏈以兩種模式運行,即目標導向模式和探索模式,取決於目標任務。 GenSim 中的任務庫是一個記憶體元件,用於儲存先前產生的高品質任務,任務庫中儲存的任務可用於多任務策略訓練或微調 LLM。

任務建立器
如下圖3 所示,語言鏈會先產生任務描述,然後再產生相關的實作。任務描述包括任務名稱、資源和任務摘要。研究在 pipeline 中採用少樣本 prompt 來產生程式碼。

##GenSim 框架中的任務庫會儲存任務創建器產生的任務,以產生更好的新任務和訓練多任務策略。任務庫是根據人工創建的基準中的任務進行初始化的。
任務庫為任務創建器為描述生成階段提供了作為條件的先前的任務描述,為程式碼生成階段提供了先前的程式碼,並prompt 任務創建器從任務庫中選擇參考任務作為編寫新任務的範例。完成任務實現並通過所有測試後,LLM 會被 prompt,以「反思(reflect)」新任務和任務庫,並形成是否應將新產生的任務新增至庫中的綜合決策。
如下圖4 所示,研究也觀察到GenSim 表現出有趣的任務層級組合和外推行為:

##LLM 監督的多任務策略
#產生任務後,研究使用這些任務實作來產生演示資料並訓練操作策略,並使用與Shridhar et al. (2022) 類似的雙流傳輸網路架構。
如下圖5 所示,該研究將程式視為任務和相關演示資料的有效表徵(圖5),就可以定義任務之間的嵌入空間,其距離指標對於來自感知的各種因素(例如物件姿態和形狀)更加穩健。

實驗及結果
此研究透過實驗驗證GenSim 框架,針對以下具體問題:(1)LLM 設計和實現模擬任務的效果如何? GenSim 可以改進 LLM 在任務產生方面的表現嗎? (2) 對 LLM 產生的任務進行訓練是否可以提升策略泛化能力?如果給予更多的生成任務,策略訓練是否會受益更多? (3) 針對 LLM 產生的模擬任務進行預訓練是否有利於現實世界的機器人策略部署?
評估LLM 機器人模擬任務的泛化能力
#如下圖6 所示,對於探索模式和目標導向模式任務生成,少樣本和任務庫的兩階段prompt 鏈可以有效提高程式碼產生的成功率。

任務層級泛化
對相關任務的少樣本策略最佳化。從下圖 7 左可以觀察到,聯合訓練 LLM 產生的任務可以將原始 CLIPort 任務上的策略效能提升 50% 以上,尤其是在低資料情況(如 5 個 demo)下。
對未見過任務的零樣本策略泛化。從圖 7 可以看到,透過對 LLM 產生的更多任務進行預訓練,研究者的模型可以更好地泛化到原始 Ravens 基準中的任務。圖 7 右中,研究者也對人工編寫任務、閉源 LLM 和開源微調 LLM 等不同任務來源上的 5 個任務進行了預訓練,並觀察到了類似的零樣本任務層級泛化。

讓預訓練模型適應真實世界
研究者將模擬環境中訓練的策略遷移到了真實環境。結果如下表1 所示,在70 個GPT-4 產生的任務上進行預訓練的模型在9 個任務上進行了10 次實驗,取得68.8% 的平均成功率,與僅在CLIPort 任務上進行預訓練的基準模型相比提升了25% 以上,與僅在50 個任務上預訓練的模型相比提升了15%。

研究者也觀察到,對不同模擬任務的預訓練提高了長期複雜任務的穩健性。比方說,GPT-4 預訓練的模型在真實世界的 build-wheel 任務上展現了更穩健的表現。

消融實驗
##模擬訓練成功率。在下表 2 中,研究者在擁有 200 個 demo 的生成任務子集上,示範了單任務和多任務策略訓練的成功率。對於 GPT-4 生成任務的策略訓練,它的平均任務成功率為單任務 75.8%,多任務 74.1%。

產生任務統計。下圖 9 (a) 中,研究者展示了 LLM 產生的 120 個任務的不同特徵的任務統計。其中 LLM 模型產生的顏色、資產、動作和實例數量之間存在著有趣的平衡。例如,產生的程式碼包含了許多超過 7 個物件實例的場景,以及許多拾起 - 放置原始動作和區塊等資產。
程式碼產生比較。下圖 9 (b) 中,研究者定性地評估了 GPT-4 和 Code Llama 的自上而下實驗中的失敗案例。

更多技術細節請參閱原始論文。
以上是語言、機器人破壁,MIT等以GPT-4自動產生模擬任務,遷移到真實世界的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 AI遊戲開發通過Upheaval的Dreamer Portal進入其代理時代May 02, 2025 am 11:17 AM
AI遊戲開發通過Upheaval的Dreamer Portal進入其代理時代May 02, 2025 am 11:17 AM動盪遊戲:與AI代理商的遊戲開發徹底改變 Roupheaval是一家遊戲開發工作室,由暴風雪和黑曜石等行業巨頭的退伍軍人組成,有望用其創新的AI驅動的Platfor革新遊戲創作
 Uber想成為您的Robotaxi商店,提供商會讓他們嗎?May 02, 2025 am 11:16 AM
Uber想成為您的Robotaxi商店,提供商會讓他們嗎?May 02, 2025 am 11:16 AMUber的Robotaxi策略:自動駕駛汽車的騎車生態系統 在最近的Curbivore會議上,Uber的Richard Willder推出了他們成為Robotaxi提供商的乘車平台的策略。 利用他們在
 AI代理玩電子遊戲將改變未來的機器人May 02, 2025 am 11:15 AM
AI代理玩電子遊戲將改變未來的機器人May 02, 2025 am 11:15 AM事實證明,視頻遊戲是最先進的AI研究的寶貴測試理由,尤其是在自主代理商和現實世界機器人的開發中,甚至有可能促進人工通用情報(AGI)的追求。 一個
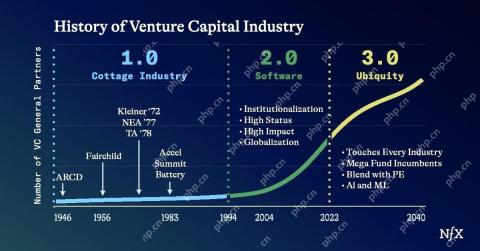 創業公司工業綜合體VC 3.0和James Currier的宣言May 02, 2025 am 11:14 AM
創業公司工業綜合體VC 3.0和James Currier的宣言May 02, 2025 am 11:14 AM不斷發展的風險投資格局的影響在媒體,財務報告和日常對話中顯而易見。 但是,對投資者,初創企業和資金的具體後果經常被忽略。 風險資本3.0:範式
 Adobe在Adobe Max London 2025更新創意云和螢火蟲May 02, 2025 am 11:13 AM
Adobe在Adobe Max London 2025更新創意云和螢火蟲May 02, 2025 am 11:13 AMAdobe Max London 2025對Creative Cloud和Firefly進行了重大更新,反映了向可訪問性和生成AI的戰略轉變。 該分析結合了事件前簡報中的見解,並融合了Adobe Leadership。 (注意:Adob
 Llamacon宣布的所有元數據May 02, 2025 am 11:12 AM
Llamacon宣布的所有元數據May 02, 2025 am 11:12 AMMeta的Llamacon公告展示了一項綜合的AI策略,旨在直接與OpenAI等封閉的AI系統競爭,同時為其開源模型創建了新的收入流。 這個多方面的方法目標bo
 關於AI僅僅是普通技術的主張的釀造爭議May 02, 2025 am 11:10 AM
關於AI僅僅是普通技術的主張的釀造爭議May 02, 2025 am 11:10 AM人工智能領域對這一論斷存在嚴重分歧。一些人堅稱,是時候揭露“皇帝的新衣”了,而另一些人則強烈反對人工智能僅僅是普通技術的觀點。 讓我們來探討一下。 對這一創新性人工智能突破的分析,是我持續撰寫的福布斯專欄文章的一部分,該專欄涵蓋人工智能領域的最新進展,包括識別和解釋各種有影響力的人工智能複雜性(請點擊此處查看鏈接)。 人工智能作為普通技術 首先,需要一些基本知識來為這場重要的討論奠定基礎。 目前有大量的研究致力於進一步發展人工智能。總目標是實現人工通用智能(AGI)甚至可能實現人工超級智能(AS
 模型公民,為什麼AI值是下一個業務碼May 02, 2025 am 11:09 AM
模型公民,為什麼AI值是下一個業務碼May 02, 2025 am 11:09 AM公司AI模型的有效性現在是一個關鍵的性能指標。自AI BOOM以來,從編寫生日邀請到編寫軟件代碼的所有事物都將生成AI使用。 這導致了語言mod的擴散


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

WebStorm Mac版
好用的JavaScript開發工具

SublimeText3 英文版
推薦:為Win版本,支援程式碼提示!

EditPlus 中文破解版
體積小,語法高亮,不支援程式碼提示功能

ZendStudio 13.5.1 Mac
強大的PHP整合開發環境

Atom編輯器mac版下載
最受歡迎的的開源編輯器

