



DriveLM是一個基於語言的驅動項目,它包含一個資料集和一個模型。透過DriveLM,我們介紹了自動駕駛(AD)中大型語言模型的推理能力,以做出決策並確保可解釋的規劃。
在DriveLM的資料集中,我們將人工書寫的推理邏輯作為連接,以促進感知、預測和規劃(P3)。在我們的模型中,我們提出了一個具備思考圖能力的AD視覺語言模型,以產生更優質的規劃結果。目前,我們已經發布了資料集的演示版本,完整的資料集和模型將在未來發布
專案連結:https://github.com/OpenDriveLab/DriveLM 需要重寫的內容是:專案連結:https://github.com/OpenDriveLab/DriveLM

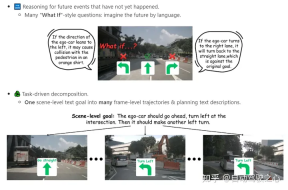
What is Graph-of -Thoughts in AD?
資料集最令人興奮的方面是,P3中的問答(QA)以圖形風格的結構連接,QA對作為每個節點,對象的關係作為邊。
相較於純語言的思考樹或思考圖,我們更傾向於多模態。在AD域中,我們之所以這樣做,是因為每個階段都定義了AD任務,從原始感測器輸入到最終控制動作
DriveLM資料集中包含什麼?
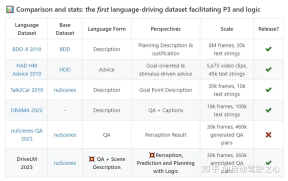
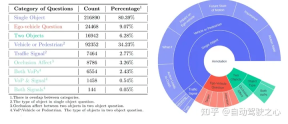
基於主流的nuScenes資料集建構我們的資料集。 DriveLM最核心的元素是基於幀的P3 QA。感知問題需要模型辨識場景中的物件。預測問題要求模型預測場景中重要物件的未來狀態。規劃問題促使模型給予合理的規劃行動,避免危險的行動。
標定過程如何?
- 關鍵影格選擇。給定一個剪輯中的所有幀,註釋器將選擇需要註釋的關鍵幀。標準是,這些框架應該涉及自車運動狀態的變化(變換車道、突然停車、停車後啟動等)。
- 關鍵物件選擇。給定關鍵幀,註釋器需要拾取周圍六個圖像中的關鍵物件。標準是這些物體應該能夠影響自車(交通號誌、過街行人、其他車輛)
- 問答註記。給定這些關鍵對象,我們會自動產生關於感知、預測和規劃的單一或多個對象的問題。更多細節可以在我們的演示數據中找到。
以上是大模型「上車」關鍵一步:全球首個語言+自動駕駛開源資料集來了的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 10個生成AI編碼擴展,在VS代碼中,您必須探索Apr 13, 2025 am 01:14 AM
10個生成AI編碼擴展,在VS代碼中,您必須探索Apr 13, 2025 am 01:14 AM嘿,編碼忍者!您當天計劃哪些與編碼有關的任務?在您進一步研究此博客之前,我希望您考慮所有與編碼相關的困境,這是將其列出的。 完畢? - 讓&#8217
 烹飪創新:人工智能如何改變食品服務Apr 12, 2025 pm 12:09 PM
烹飪創新:人工智能如何改變食品服務Apr 12, 2025 pm 12:09 PMAI增強食物準備 在新生的使用中,AI系統越來越多地用於食品製備中。 AI驅動的機器人在廚房中用於自動化食物準備任務,例如翻轉漢堡,製作披薩或組裝SA
 Python名稱空間和可變範圍的綜合指南Apr 12, 2025 pm 12:00 PM
Python名稱空間和可變範圍的綜合指南Apr 12, 2025 pm 12:00 PM介紹 了解Python函數中變量的名稱空間,範圍和行為對於有效編寫和避免運行時錯誤或異常至關重要。在本文中,我們將研究各種ASP
 視覺語言模型(VLMS)的綜合指南Apr 12, 2025 am 11:58 AM
視覺語言模型(VLMS)的綜合指南Apr 12, 2025 am 11:58 AM介紹 想像一下,穿過美術館,周圍是生動的繪畫和雕塑。現在,如果您可以向每一部分提出一個問題並獲得有意義的答案,該怎麼辦?您可能會問:“您在講什麼故事?
 聯發科技與kompanio Ultra和Dimenty 9400增強優質陣容Apr 12, 2025 am 11:52 AM
聯發科技與kompanio Ultra和Dimenty 9400增強優質陣容Apr 12, 2025 am 11:52 AM繼續使用產品節奏,本月,Mediatek發表了一系列公告,包括新的Kompanio Ultra和Dimenty 9400。這些產品填補了Mediatek業務中更傳統的部分,其中包括智能手機的芯片
 本週在AI:沃爾瑪在時尚趨勢之前設定了時尚趨勢Apr 12, 2025 am 11:51 AM
本週在AI:沃爾瑪在時尚趨勢之前設定了時尚趨勢Apr 12, 2025 am 11:51 AM#1 Google推出了Agent2Agent 故事:現在是星期一早上。作為AI驅動的招聘人員,您更聰明,而不是更努力。您在手機上登錄公司的儀表板。它告訴您三個關鍵角色已被採購,審查和計劃的FO
 生成的AI遇到心理摩托車Apr 12, 2025 am 11:50 AM
生成的AI遇到心理摩托車Apr 12, 2025 am 11:50 AM我猜你一定是。 我們似乎都知道,心理障礙由各種chat不休,這些chat不休,這些chat不休,混合了各種心理術語,並且常常是難以理解的或完全荒謬的。您需要做的一切才能噴出fo
 原型:科學家將紙變成塑料Apr 12, 2025 am 11:49 AM
原型:科學家將紙變成塑料Apr 12, 2025 am 11:49 AM根據本週發表的一項新研究,只有在2022年製造的塑料中,只有9.5%的塑料是由回收材料製成的。同時,塑料在垃圾填埋場和生態系統中繼續堆積。 但是有幫助。一支恩金團隊


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

MinGW - Minimalist GNU for Windows
這個專案正在遷移到osdn.net/projects/mingw的過程中,你可以繼續在那裡關注我們。 MinGW:GNU編譯器集合(GCC)的本機Windows移植版本,可自由分發的導入函式庫和用於建置本機Windows應用程式的頭檔;包括對MSVC執行時間的擴展,以支援C99功能。 MinGW的所有軟體都可以在64位元Windows平台上運作。

ZendStudio 13.5.1 Mac
強大的PHP整合開發環境

EditPlus 中文破解版
體積小,語法高亮,不支援程式碼提示功能

禪工作室 13.0.1
強大的PHP整合開發環境

