
python中怎麼使用tensorflow建構長短時記憶LSTM

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-05-22 12:32:141460瀏覽
LSTM簡介
1、RNN的梯度消失問題
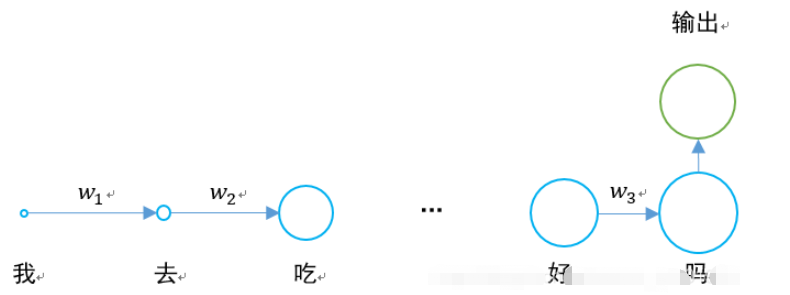
在過去的時間裡我們學習了RNN循環神經網絡,其結構示意圖是這樣的:

其存在的最大問題是,當w1、w2、w3這些值小於0時,如果一句話夠長,那麼其在神經網路進行反向傳播與前向傳播時,存在梯度消失的問題。
0.925=0.07,如果一句話有20到30個字,那麼第一個字的隱含層輸出傳遞到最後,將會變成原來的0.07倍,比起最後一個字的影響,大大降低。
其具體情況是這樣的:
長短時記憶網路就是為了解決梯度消失的問題出現的。
2、LSTM的結構
原始RNN的隱藏層只有一個狀態h,從頭傳遞到尾,它對於短期的輸入非常敏感。
如果我們再增加一個狀態c,讓它來保存長期的狀態,問題就可以解決了。
對於RNN和LSTM而言,其兩個step單元的對比如下。

我們把LSTM的結構按照時間維度展開:
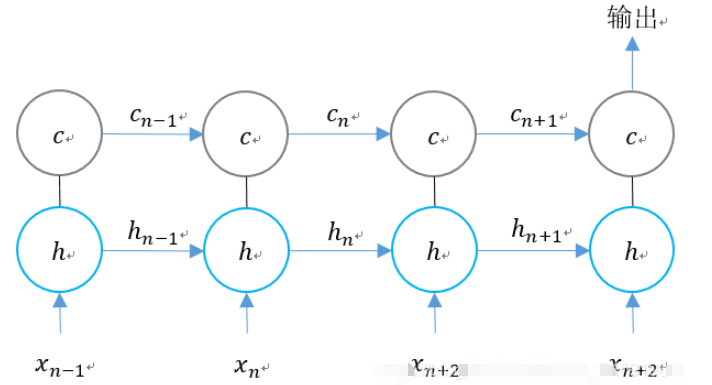
我們可以看出,在n時刻,LSTM的輸入有三個:
1、當下時刻網路的輸入值;
2、上一刻LSTM的輸出值;
3、上一時刻的單元狀態。
LSTM的輸出有兩個:
1、此時LSTM輸出值;
2、當下時刻的單元狀態。
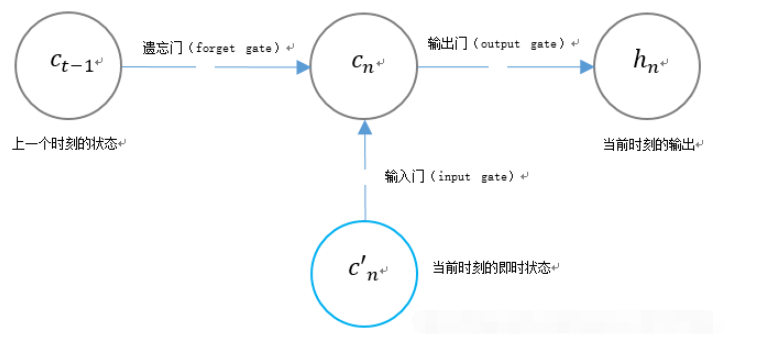
3、LSTM獨特的閘門結構
LSTM用兩個閘門來控制單元狀態cn的內容:
1、遺忘閘(forget gate),它決定了上一刻的單元狀態cn-1有多少保留到當下時刻;
2、輸入閘門(input gate),它決定了當前時刻網路的輸入c’n有多少保存到單元狀態。
LSTM用一個閘門來控制目前輸出值hn的內容:
輸出閘門(output gate),它決定了當前時刻單元狀態cn有多少輸出。
tensorflowLSTM的相關函數
tf.contrib.rnn.BasicLSTMCell
tf.contrib.rnn.BasicLSTMCell(
num_units,
forget_bias=1.0,
state_is_tuple=True,
activation=None,
reuse=None,
name=None,
dtype=None
)#num_units:RNN單元中的神經元數量,即輸出神經元數量。
forget_bias:偏移增加了忘記門。手動將恢復的CudnnLSTM訓練檢查點(checkpoint)設定為0.0。
state_is_tuple:如果為True,則接受和傳回的狀態是c_state和m_state的2-tuple;如果為False,則他們沿著列軸連接。 False即將棄用。
activation:激活函數。
reuse:描述是否在現有範圍中重複使用變數。如果現有範圍已經具有給定變數且不為True,則會引發錯誤。
name:圖層的名稱。
dtype:該層的資料型態。
使用時,可以定義為:
lstm_cell = tf.contrib.rnn.BasicLSTMCell(self.cell_size, forget_bias=1.0, state_is_tuple=True)
在定義完成後,可以進行狀態初始化:
self.cell_init_state = lstm_cell.zero_state(self.batch_size, dtype=tf.float32)
tf.nn.dynamic_rnn
tf.nn.dynamic_rnn(
cell,
inputs,
sequence_length=None,
initial_state=None,
dtype=None,
parallel_iterations=None,
swap_memory=False,
time_major=False,
scope=None
)cell:上文所定義的lstm_cell。
inputs:RNN輸入。如果time_major==false(預設),則必須是如下shape的tensor:[batch_size,max_time,…]或此類元素的嵌套元組。如果time_major==true,則必須是如下形狀的tensor:[max_time,batch_size,…]或此類元素的嵌套元組。
向量的大小由 sequence_length 參數決定,其類型為 Int32/Int64。用於在超過批次元素的序列長度時複製通過狀態和零輸出。因此,它更多的是為了性能而不是正確性。
initial_state:上述定義的_init_state。
dtype:資料型態。
parallel_iterations:並行運行的迭代次數。那些不具有任何時間依賴性並且可以並行運行的操作將是。這個參數用時間來交換空間。較大的值會消耗更多的內存,但運算速度更快,而較小的值則使用較少的內存,但需要更長的計算時間。
time_major:输入和输出tensor的形状格式。这些张量的形状必须为[max_time, batch_size, depth],若表述正确,则它为真。这些张量的形状必须是[batch_size,max_time,depth],如果为假。time_major=true可以提高效率,因为它避免了在RNN计算的开头和结尾进行转置操作。默认情况下,此函数为False,因为大多数的 TensorFlow 数据以批处理主数据的形式存在。
scope:创建的子图的可变作用域;默认为“RNN”。
在LSTM的最后,需要用该函数得出结果。
self.cell_outputs, self.cell_final_state = tf.nn.dynamic_rnn( lstm_cell, self.l_in_y, initial_state=self.cell_init_state, time_major=False)
返回的是一个元组 (outputs, state):
outputs:LSTM的最后一层的输出,是一个tensor。如果为time_major== False,则它的shape为[batch_size,max_time,cell.output_size]。如果为time_major== True,则它的shape为[max_time,batch_size,cell.output_size]。
states:states是一个tensor。state是最终的状态,也就是序列中最后一个cell输出的状态。一般情况下states的形状为 [batch_size, cell.output_size],但当输入的cell为BasicLSTMCell时,states的形状为[2,batch_size, cell.output_size ],其中2也对应着LSTM中的cell state和hidden state。
整个LSTM的定义过程为:
def add_input_layer(self,):
#X最开始的形状为(256 batch,28 steps,28 inputs)
#转化为(256 batch*28 steps,128 hidden)
l_in_x = tf.reshape(self.xs, [-1, self.input_size], name='to_2D')
#获取Ws和Bs
Ws_in = self._weight_variable([self.input_size, self.cell_size])
bs_in = self._bias_variable([self.cell_size])
#转化为(256 batch*28 steps,256 hidden)
with tf.name_scope('Wx_plus_b'):
l_in_y = tf.matmul(l_in_x, Ws_in) + bs_in
# (batch * n_steps, cell_size) ==> (batch, n_steps, cell_size)
# (256*28,256)->(256,28,256)
self.l_in_y = tf.reshape(l_in_y, [-1, self.n_steps, self.cell_size], name='to_3D')
def add_cell(self):
#神经元个数
lstm_cell = tf.contrib.rnn.BasicLSTMCell(self.cell_size, forget_bias=1.0, state_is_tuple=True)
#每一次传入的batch的大小
with tf.name_scope('initial_state'):
self.cell_init_state = lstm_cell.zero_state(self.batch_size, dtype=tf.float32)
#不是主列
self.cell_outputs, self.cell_final_state = tf.nn.dynamic_rnn(
lstm_cell, self.l_in_y, initial_state=self.cell_init_state, time_major=False)
def add_output_layer(self):
#设置Ws,Bs
Ws_out = self._weight_variable([self.cell_size, self.output_size])
bs_out = self._bias_variable([self.output_size])
# shape = (batch,output_size)
# (256,10)
with tf.name_scope('Wx_plus_b'):
self.pred = tf.matmul(self.cell_final_state[-1], Ws_out) + bs_out全部代码
该例子为手写体识别例子,将手写体的28行分别作为每一个step的输入,输入维度均为28列。
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
import numpy as np
mnist = input_data.read_data_sets("MNIST_data",one_hot = "true")
BATCH_SIZE = 256 # 每一个batch的数据数量
TIME_STEPS = 28 # 图像共28行,分为28个step进行传输
INPUT_SIZE = 28 # 图像共28列
OUTPUT_SIZE = 10 # 共10个输出
CELL_SIZE = 256 # RNN 的 hidden unit size,隐含层神经元的个数
LR = 1e-3 # learning rate,学习率
def get_batch(): #获取训练的batch
batch_xs,batch_ys = mnist.train.next_batch(BATCH_SIZE)
batch_xs = batch_xs.reshape([BATCH_SIZE,TIME_STEPS,INPUT_SIZE])
return [batch_xs,batch_ys]
class LSTMRNN(object): #构建LSTM的类
def __init__(self, n_steps, input_size, output_size, cell_size, batch_size):
self.n_steps = n_steps
self.input_size = input_size
self.output_size = output_size
self.cell_size = cell_size
self.batch_size = batch_size
#输入输出
with tf.name_scope('inputs'):
self.xs = tf.placeholder(tf.float32, [None, n_steps, input_size], name='xs')
self.ys = tf.placeholder(tf.float32, [None, output_size], name='ys')
#直接加层
with tf.variable_scope('in_hidden'):
self.add_input_layer()
#增加LSTM的cell
with tf.variable_scope('LSTM_cell'):
self.add_cell()
#直接加层
with tf.variable_scope('out_hidden'):
self.add_output_layer()
#计算损失值
with tf.name_scope('cost'):
self.compute_cost()
#训练
with tf.name_scope('train'):
self.train_op = tf.train.AdamOptimizer(LR).minimize(self.cost)
#正确率计算
self.correct_pre = tf.equal(tf.argmax(self.ys,1),tf.argmax(self.pred,1))
self.accuracy = tf.reduce_mean(tf.cast(self.correct_pre,tf.float32))
def add_input_layer(self,):
#X最开始的形状为(256 batch,28 steps,28 inputs)
#转化为(256 batch*28 steps,128 hidden)
l_in_x = tf.reshape(self.xs, [-1, self.input_size], name='to_2D')
#获取Ws和Bs
Ws_in = self._weight_variable([self.input_size, self.cell_size])
bs_in = self._bias_variable([self.cell_size])
#转化为(256 batch*28 steps,256 hidden)
with tf.name_scope('Wx_plus_b'):
l_in_y = tf.matmul(l_in_x, Ws_in) + bs_in
# (batch * n_steps, cell_size) ==> (batch, n_steps, cell_size)
# (256*28,256)->(256,28,256)
self.l_in_y = tf.reshape(l_in_y, [-1, self.n_steps, self.cell_size], name='to_3D')
def add_cell(self):
#神经元个数
lstm_cell = tf.contrib.rnn.BasicLSTMCell(self.cell_size, forget_bias=1.0, state_is_tuple=True)
#每一次传入的batch的大小
with tf.name_scope('initial_state'):
self.cell_init_state = lstm_cell.zero_state(self.batch_size, dtype=tf.float32)
#不是主列
self.cell_outputs, self.cell_final_state = tf.nn.dynamic_rnn(
lstm_cell, self.l_in_y, initial_state=self.cell_init_state, time_major=False)
def add_output_layer(self):
#设置Ws,Bs
Ws_out = self._weight_variable([self.cell_size, self.output_size])
bs_out = self._bias_variable([self.output_size])
# shape = (batch,output_size)
# (256,10)
with tf.name_scope('Wx_plus_b'):
self.pred = tf.matmul(self.cell_final_state[-1], Ws_out) + bs_out
def compute_cost(self):
self.cost = tf.reduce_mean(
tf.nn.softmax_cross_entropy_with_logits(logits = self.pred,labels = self.ys)
)
def _weight_variable(self, shape, name='weights'):
initializer = np.random.normal(0.0,1.0 ,size=shape)
return tf.Variable(initializer, name=name,dtype = tf.float32)
def _bias_variable(self, shape, name='biases'):
initializer = np.ones(shape=shape)*0.1
return tf.Variable(initializer, name=name,dtype = tf.float32)
if __name__ == '__main__':
#搭建 LSTMRNN 模型
model = LSTMRNN(TIME_STEPS, INPUT_SIZE, OUTPUT_SIZE, CELL_SIZE, BATCH_SIZE)
sess = tf.Session()
sess.run(tf.global_variables_initializer())
#训练10000次
for i in range(10000):
xs, ys = get_batch() #提取 batch data
if i == 0:
#初始化data
feed_dict = {
model.xs: xs,
model.ys: ys,
}
else:
feed_dict = {
model.xs: xs,
model.ys: ys,
model.cell_init_state: state #保持 state 的连续性
}
#训练
_, cost, state, pred = sess.run(
[model.train_op, model.cost, model.cell_final_state, model.pred],
feed_dict=feed_dict)
#打印精确度结果
if i % 20 == 0:
print(sess.run(model.accuracy,feed_dict = {
model.xs: xs,
model.ys: ys,
model.cell_init_state: state #保持 state 的连续性
}))以上是python中怎麼使用tensorflow建構長短時記憶LSTM的詳細內容。更多資訊請關注PHP中文網其他相關文章!