
Rumah >Peranti teknologi >AI >Think2Drive: Kaedah RL berasaskan model pertama untuk pemanduan autonomi (Universiti Shanghai Jiaotong)
Think2Drive: Kaedah RL berasaskan model pertama untuk pemanduan autonomi (Universiti Shanghai Jiaotong)

- 王林ke hadapan
- 2024-03-01 16:31:02978semak imbas
Lari dengan kecekapan peringkat pakar dalam CARLA v2.
Tajuk: Think2Drive: Pembelajaran Pengukuhan Cekap dengan Berfikir dalam Model Dunia Terpendam untuk Pemanduan Autonomi Kuasi-Realistik (dalam CARLA-v2)
Gabungan Pengarang: Universiti Shanghai Jiao Tong
Pemandu Autonomi (AD) dalam dunia sebenar bandar Memandu melibatkan banyak kes sudut. Simulator AD yang dikeluarkan baru-baru ini CARLA v2 menambah 39 peristiwa biasa pada senario pemanduan dan menyediakan platform ujian yang lebih hampir kepada realiti berbanding CARLA v1. Ini membawa cabaran baharu kepada komuniti Setakat ini, tiada literatur melaporkan apa-apa kejayaan dengan senario baharu dalam CARLA v2, kerana kebanyakan kerja sedia ada perlu bergantung pada peraturan khusus untuk perancangan, tetapi ia tidak dapat merangkumi CARLA v2 . Kerja ini secara aktif dan terus melatih perancang, berharap dapat mengendalikan kes sudut secara fleksibel dan berkesan, dan percaya bahawa ini juga merupakan hala tuju AD pada masa hadapan. Untuk pengetahuan terbaik kami, kami membangunkan kaedah pembelajaran tetulang berasaskan model pertama, bernama Think2Drive, untuk AD, dengan model dunia untuk mempelajari peralihan persekitaran, yang kemudiannya bertindak sebagai simulator saraf untuk melatih perancang. Paradigma ini sangat meningkatkan kecekapan latihan kerana ruang keadaan berdimensi rendah dan pengiraan selari tensor dalam model dunia.
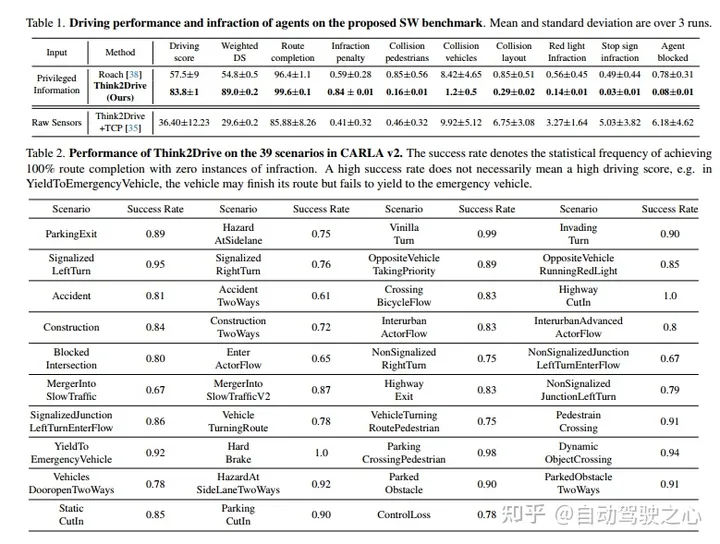
Akibatnya, Think2Drive dapat berjalan pada kecekapan tahap pakar dalam CARLA v2 selepas 3 hari latihan pada GPU A6000 tunggal Sepanjang pengetahuan kami, tiada kejayaan (100% penyiapan laluan) telah dilaporkan untuk CARLA v2 sehingga kini. CornerCase-Repository juga dicadangkan, penanda aras yang menyokong penilaian model pemanduan melalui senario. Selain itu, metrik seimbang baharu dicadangkan untuk menilai prestasi, termasuk penyiapan laluan, bilangan pelanggaran dan kepadatan pemandangan, supaya markah pemanduan boleh memberikan lebih banyak maklumat tentang prestasi pemanduan sebenar.
Hasil percubaan
ditulis di penghujung
Selamat datang ke gudang kami! Ia meliputi banyak bidang teknikal, termasuk BEV, gabungan pelbagai mod, pengesanan penghunian kenderaan, persepsi visual radar gelombang milimeter, pengesanan garisan lorong dan persepsi 3D, dsb. Kami juga berkongsi ulasan dan kertas kerja mengenai peta dalam talian, penentukuran berbilang sensor, Nerf, model berskala besar, kawalan perancangan dan ramalan trajektori. Saya harap anda menyukai kandungan kami, dan jangan lupa bintangkan dan ikuti gudang kami untuk mendapatkan maklumat yang lebih menarik! Terima kasih atas sokongan anda!
Atas ialah kandungan terperinci Think2Drive: Kaedah RL berasaskan model pertama untuk pemanduan autonomi (Universiti Shanghai Jiaotong). Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!