


OccNeRF: Tiada pengawasan data lidar diperlukan sama sekali

Ditulis di atas & ringkasan peribadi pengarang
Dalam beberapa tahun kebelakangan ini, tugas ramalan penghunian 3D dalam bidang pemanduan autonomi telah mendapat perhatian meluas daripada ahli akademik dan industri kerana kelebihannya yang unik. Tugasan ini menyediakan maklumat terperinci untuk perancangan dan navigasi pemanduan autonomi dengan membina semula struktur 3D persekitaran sekeliling. Walau bagaimanapun, kebanyakan kaedah arus perdana semasa bergantung pada label yang dijana berdasarkan awan titik LiDAR untuk menyelia latihan rangkaian. Dalam kajian OccNeRF baru-baru ini, pengarang mencadangkan kaedah ramalan penghunian berbilang kamera yang diselia sendiri yang dipanggil Medan Pendudukan Berparameter. Kaedah ini menyelesaikan masalah tanpa sempadan dalam pemandangan luar dan menyusun semula strategi pensampelan. Kemudian, melalui teknologi pemaparan volum (Volume Rendering), medan yang diduduki ditukar kepada peta kedalaman berbilang kamera dan diawasi oleh ketekalan fotometrik berbilang bingkai (Ralat Fotometrik). Selain itu, kaedah ini juga menggunakan model segmentasi semantik kosa kata terbuka yang telah terlatih untuk menjana label semantik 2D untuk memberikan maklumat semantik kepada bidang pekerjaan. Model pembahagian semantik leksikon terbuka ini dapat membahagikan objek yang berbeza dalam adegan dan memberikan label semantik kepada setiap objek. Dengan menggabungkan label semantik ini dengan medan penghunian, model dapat memahami persekitaran dengan lebih baik dan membuat ramalan yang lebih tepat. Secara ringkasnya, kaedah OccNeRF mencapai ramalan penghunian berketepatan tinggi dalam senario pemanduan autonomi melalui gabungan penggunaan medan penghunian berparameter, pemaparan volum dan ketekalan fotometrik berbilang bingkai, serta dengan model pembahagian semantik perbendaharaan kata terbuka. Kaedah ini menyediakan sistem pemanduan autonomi dengan lebih banyak maklumat alam sekitar dan dijangka meningkatkan keselamatan dan kebolehpercayaan pemanduan autonomi.
- Pautan kertas: https://arxiv.org/pdf/2312.09243.pdf
- Pautan kod: https://github.com/LinShan-Bin/OccNeRF
Dalam beberapa tahun kebelakangan ini, dengan perkembangan pesat teknologi kecerdasan buatan, kemajuan besar telah dicapai dalam bidang pemanduan autonomi. Persepsi 3D adalah asas untuk pemanduan autonomi dan menyediakan maklumat yang diperlukan untuk perancangan dan membuat keputusan seterusnya. Dalam kaedah tradisional, lidar boleh menangkap data 3D yang tepat secara langsung, tetapi kos penderia yang tinggi dan titik pengimbasan yang jarang mengehadkan penggunaan praktikalnya. Sebaliknya, kaedah penderiaan 3D berasaskan imej adalah kos rendah dan berkesan serta telah mendapat perhatian yang semakin meningkat. Berbilang kamera Pengesanan objek 3D telah menjadi aliran utama tugas memahami pemandangan 3D sejak sekian lama, tetapi ia tidak dapat mengatasi kategori tanpa had di dunia nyata dan mengalami pengedaran data ekor panjang
.Ramalan penghunian 3D boleh mengimbangi kekurangan ini dengan membina semula geometri pemandangan sekeliling secara langsung melalui input berbilang paparan. Kebanyakan kaedah sedia ada memfokuskan pada reka bentuk model dan pengoptimuman prestasi, bergantung pada label yang dijana oleh awan titik LiDAR untuk menyelia latihan rangkaian, yang tidak tersedia dalam sistem berasaskan imej. Dalam erti kata lain, kami masih perlu menggunakan kenderaan pengumpulan data yang mahal untuk mengumpul data latihan dan membazirkan sejumlah besar data sebenar tanpa anotasi berbantukan awan titik LiDAR, yang mengehadkan pembangunan ramalan penghunian 3D pada tahap tertentu. Oleh itu meneroka ramalan penghunian 3D yang diselia sendiri adalah arah yang sangat berharga.
Penjelasan terperinci algoritma OccNeRF
Rajah berikut menunjukkan proses asas kaedah OccNeRF. Model ini mengambil imej berbilang kamerasebagai input, mula-mula menggunakan tulang belakang 2D untuk mengekstrak ciri imej N, dan kemudian secara langsung memperoleh ciri 3D melalui unjuran mudah dan interpolasi dwilinear (di bawah ruang berparameter ), dan akhirnya melalui 3D The Rangkaian CNN mengoptimumkan ciri 3D dan ramalan output. Untuk melatih model, kaedah OccNeRF menjana peta kedalaman bingkai semasa melalui pemaparan volum dan memperkenalkan bingkai sebelumnya dan seterusnya untuk mengira kehilangan fotometrik. Untuk memperkenalkan lebih banyak maklumat masa, OccNeRF menggunakan medan penghunian untuk memaparkan peta kedalaman berbilang bingkai dan mengira fungsi kehilangan. Pada masa yang sama, OccNeRF juga memaparkan peta semantik 2D secara serentak dan diselia oleh Model Segmentasi Semantik Leksikon Terbuka.

jurang julat persepsiantara kamera dan grid yang diduduki. Secara teorinya, kamera boleh menangkap objek pada jarak tak terhingga, manakala model ramalan penghunian sebelumnya hanya mempertimbangkan ruang yang lebih dekat (contohnya, dalam 40 m). Dalam kaedah diselia, model boleh belajar untuk mengabaikan objek jauh berdasarkan isyarat penyeliaan, jika hanya ruang dekat masih dipertimbangkan, kehadiran sejumlah besar objek luar dalam imej akan mempunyai negatif; kesan ke atas proses pengoptimuman. Berdasarkan ini, OccNeRF mengguna pakai Medan Pendudukan Berparameter untuk memodelkan julat pemandangan luar tanpa had.

Ruang parameterisasi dalam OccNeRF dibahagikan kepada dalaman dan luaran. Ruang dalam ialah pemetaan linear bagi koordinat asal, mengekalkan resolusi tinggi manakala ruang luar mewakili julat tak terhingga. Secara khusus, OccNeRF membuat perubahan berikut pada koordinat titik tengah dalam ruang 3D:
di mana ialah koordinat , ialah parameter boleh laras, menunjukkan nilai sempadan ruang dalaman yang sepadan juga boleh laras Parameter terlaras mewakili bahagian ruang dalaman yang diduduki. Apabila menjana medan penghunian berparameter, sampel pertama OccNeRF dalam ruang berparameter, memperoleh koordinat asal melalui transformasi songsang, kemudian menayangkan koordinat asal pada satah imej, dan akhirnya memperoleh medan penghunian melalui persampelan dan konvolusi tiga dimensi.
Anggaran Kedalaman Berbilang bingkaiUntuk melatih rangkaian penghunian, OccNeRF memilih untuk menggunakan pemaparan volum untuk menukar penghunian kepada peta kedalaman dan mengawasinya melalui fungsi kehilangan fotometrik. Strategi pensampelan adalah penting semasa memaparkan peta kedalaman. Dalam ruang berparameter, jika anda membuat sampel secara langsung secara seragam berdasarkan kedalaman atau paralaks, titik pensampelan akan diagihkan secara tidak sekata dalam ruang dalaman atau luaran, yang akan menjejaskan proses pengoptimuman. Oleh itu, OccNeRF bercadang untuk membuat sampel secara langsung secara seragam dalam ruang berparameter di bawah premis bahawa pusat kamera berdekatan dengan asal. Selain itu, OccNeRF membuat dan menyelia peta kedalaman berbilang bingkai semasa latihan. Rajah di bawah menunjukkan secara visual kelebihan menggunakan perwakilan spatial parametrik. (Baris ketiga menggunakan ruang berparameter, baris kedua tidak.)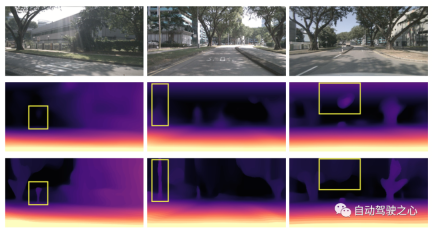
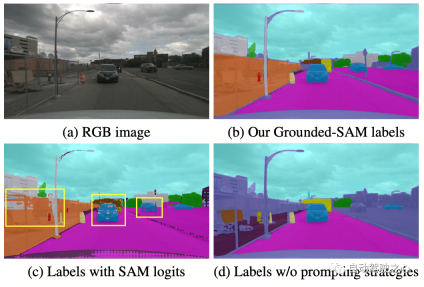
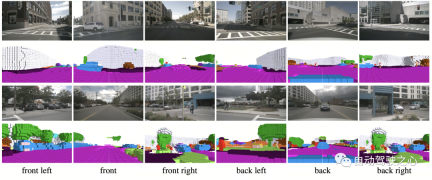
pengoptimuman perkataan segera, yang menggantikan kategori yang tidak jelas dalam nuScenes dengan penerangan yang tepat. Tiga strategi digunakan dalam OccNeRF untuk mengoptimumkan perkataan segera: penggantian perkataan yang tidak jelas (kereta digantikan dengan sedan), perkataan-ke-perkataan berbilang perkataan (buatan manusia digantikan dengan bangunan, papan iklan dan jambatan), dan pengenalan maklumat tambahan (basikal diganti dengan basikal, penunggang basikal). Yang kedua ialah menentukan kategori berdasarkan keyakinan bingkai pengesanan dalam Grounding DINO dan bukannya keyakinan piksel demi piksel yang diberikan oleh SAM. Kesan label semantik yang dijana oleh OccNeRF adalah seperti berikut:
 hasil percubaan OccNeRF
hasil percubaan OccNeRF
OccNeRF menjalankan eksperimen pada nuScenes dan kebanyakannya menyelesaikan anggaran kedalaman penyeliaan sendiri berbilang paparan dan ramalan tugasan 3D 3D
Anggaran kedalaman seliaan sendiri berbilang paparanprestasi anggaran kedalaman seliaan sendiri berbilang paparan OccNeRF pada nuScenes ditunjukkan dalam jadual di bawah. Dapat dilihat bahawa OccNeRF berdasarkan pemodelan 3D dengan ketara mengatasi kaedah 2D dan juga mengatasi SimpleOcc, sebahagian besarnya disebabkan oleh julat spatial tanpa had yang OccNeRF model untuk pemandangan luar.Beberapa visualisasi dalam kertas adalah seperti berikut: 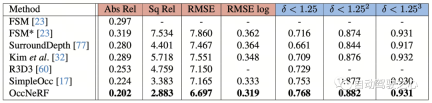
Ramalan penghunian 3D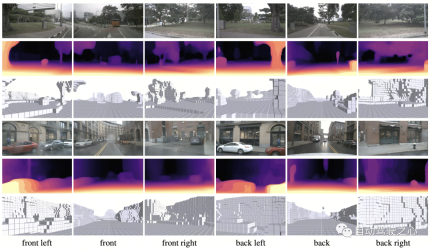
Beberapa visualisasi dalam artikel tersebut adalah seperti berikut: 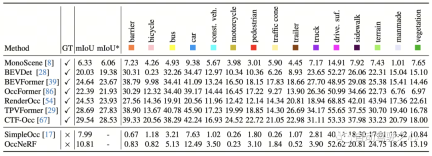
 Ringkasan
Ringkasan
Pada masa banyak pengeluar kereta cuba membuang ribuan penderia LiDAR yang tidak berlabel, bagaimana untuk membuat imej yang baik. data adalah subjek isu penting. Dan OccNeRF telah membawa kami percubaan yang berharga.
Pautan asal: https://mp.weixin.qq.com/s/UiYEeauAGVtT0c5SB2tHEA
Atas ialah kandungan terperinci OccNeRF: Tiada pengawasan data lidar diperlukan sama sekali. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 Cara Membina Pembantu AI Peribadi Anda Dengan Huggingface SmollmApr 18, 2025 am 11:52 AM
Cara Membina Pembantu AI Peribadi Anda Dengan Huggingface SmollmApr 18, 2025 am 11:52 AMMemanfaatkan kuasa AI di peranti: Membina CLI Chatbot Peribadi Pada masa lalu, konsep pembantu AI peribadi kelihatan seperti fiksyen sains. Bayangkan Alex, seorang peminat teknologi, bermimpi seorang sahabat AI yang pintar, yang tidak bergantung
 AI untuk Kesihatan Mental dianalisis dengan penuh perhatian melalui inisiatif baru yang menarik di Stanford UniversityApr 18, 2025 am 11:49 AM
AI untuk Kesihatan Mental dianalisis dengan penuh perhatian melalui inisiatif baru yang menarik di Stanford UniversityApr 18, 2025 am 11:49 AMPelancaran AI4MH mereka berlaku pada 15 April, 2025, dan Luminary Dr. Tom Insel, M.D., pakar psikiatri yang terkenal dan pakar neurosains, berkhidmat sebagai penceramah kick-off. Dr. Insel terkenal dengan kerja cemerlangnya dalam penyelidikan kesihatan mental dan techno
 Kelas Draf WNBA 2025 memasuki liga yang semakin meningkat dan melawan gangguan dalam talianApr 18, 2025 am 11:44 AM
Kelas Draf WNBA 2025 memasuki liga yang semakin meningkat dan melawan gangguan dalam talianApr 18, 2025 am 11:44 AM"Kami mahu memastikan bahawa WNBA kekal sebagai ruang di mana semua orang, pemain, peminat dan rakan kongsi korporat, berasa selamat, dihargai dan diberi kuasa," kata Engelbert, menangani apa yang telah menjadi salah satu cabaran sukan wanita yang paling merosakkan. Anno
 Panduan Komprehensif untuk Struktur Data Terbina Python - Analytics VidhyaApr 18, 2025 am 11:43 AM
Panduan Komprehensif untuk Struktur Data Terbina Python - Analytics VidhyaApr 18, 2025 am 11:43 AMPengenalan Python cemerlang sebagai bahasa pengaturcaraan, terutamanya dalam sains data dan AI generatif. Manipulasi data yang cekap (penyimpanan, pengurusan, dan akses) adalah penting apabila berurusan dengan dataset yang besar. Kami pernah meliputi nombor dan st
 Tayangan pertama dari model baru Openai berbanding dengan alternatifApr 18, 2025 am 11:41 AM
Tayangan pertama dari model baru Openai berbanding dengan alternatifApr 18, 2025 am 11:41 AMSebelum menyelam, kaveat penting: Prestasi AI adalah spesifik yang tidak ditentukan dan sangat digunakan. Dalam istilah yang lebih mudah, perbatuan anda mungkin berbeza -beza. Jangan ambil artikel ini (atau lain -lain) sebagai perkataan akhir -sebaliknya, uji model ini pada senario anda sendiri
 AI Portfolio | Bagaimana untuk membina portfolio untuk kerjaya AI?Apr 18, 2025 am 11:40 AM
AI Portfolio | Bagaimana untuk membina portfolio untuk kerjaya AI?Apr 18, 2025 am 11:40 AMMembina portfolio AI/ML yang menonjol: Panduan untuk Pemula dan Profesional Mewujudkan portfolio yang menarik adalah penting untuk mendapatkan peranan dalam kecerdasan buatan (AI) dan pembelajaran mesin (ML). Panduan ini memberi nasihat untuk membina portfolio
 AI AI apa yang boleh dimaksudkan untuk operasi keselamatanApr 18, 2025 am 11:36 AM
AI AI apa yang boleh dimaksudkan untuk operasi keselamatanApr 18, 2025 am 11:36 AMHasilnya? Pembakaran, ketidakcekapan, dan jurang yang melebar antara pengesanan dan tindakan. Tak satu pun dari ini harus datang sebagai kejutan kepada sesiapa yang bekerja dalam keselamatan siber. Janji Agentic AI telah muncul sebagai titik perubahan yang berpotensi. Kelas baru ini
 Google Versus Openai: AI berjuang untuk pelajarApr 18, 2025 am 11:31 AM
Google Versus Openai: AI berjuang untuk pelajarApr 18, 2025 am 11:31 AMImpak segera berbanding perkongsian jangka panjang? Dua minggu yang lalu Openai melangkah ke hadapan dengan tawaran jangka pendek yang kuat, memberikan akses kepada pelajar A.S. dan Kanada.


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SecLists
SecLists ialah rakan penguji keselamatan muktamad. Ia ialah koleksi pelbagai jenis senarai yang kerap digunakan semasa penilaian keselamatan, semuanya di satu tempat. SecLists membantu menjadikan ujian keselamatan lebih cekap dan produktif dengan menyediakan semua senarai yang mungkin diperlukan oleh penguji keselamatan dengan mudah. Jenis senarai termasuk nama pengguna, kata laluan, URL, muatan kabur, corak data sensitif, cangkerang web dan banyak lagi. Penguji hanya boleh menarik repositori ini ke mesin ujian baharu dan dia akan mempunyai akses kepada setiap jenis senarai yang dia perlukan.

PhpStorm versi Mac
Alat pembangunan bersepadu PHP profesional terkini (2018.2.1).

Muat turun versi mac editor Atom
Editor sumber terbuka yang paling popular

ZendStudio 13.5.1 Mac
Persekitaran pembangunan bersepadu PHP yang berkuasa

